
未知环境下机器人导航算法与避障算法研究
2020-05-21 10:48包震洲俞鸿飞金文德李伟达
机械设计与制造 2020年5期
包震洲,俞鸿飞,金文德,李伟达
(1.国网浙江省电力公司紧水滩水发电厂,浙江 杭州 310000;2.国网浙江省电力公司,浙江 杭州 310000;3.苏州大学机电工程学院,江苏 苏州 215021)
1 引言
针对机器人在复杂未知的环境下进行环境的混合导航与三维地图重建等复杂问题进行了深入研究,全文阐述了机器人的运动控制、视觉导航、机器人避障等问题。
文献[2]提出了许多用于新型救援机器人导航的方法以提高导航精度,卡尔曼滤波器基于机器人的动作(如速度,加速度等)和传感器的输出来估计下一个位置。测量由编码器和卡尔曼滤波器产生的误差。实验结果表明,卡尔曼滤波器提高了精度[2]。文献[3]讨论网络延迟对使用云环境的低成本简单机器人的远程导航的影响,使用机器人模拟器进行远程导航的实验。文献[4]讨论了通过自主机器人视觉系统捕获的图像的处理和识别,自主机器人的视觉系统可以获得和分析用于自主决策的必要的环境信息。
以自主机器人混合导航与三维地图重建为研究对象,将其研发的功能分为如下:在将机器人集成到先进制造系统的研究中,利用三维仿真和虚拟现实技术实现了实时地图三维重建。同时,建立了基于自然语言约束性的混合导航算法,将路标和大致方位和距离的关系映射建立导航地图,提取关键引导路径实现机器人路径规划,在网格环境中,进行环境定位和地图导航,路径规划可以实现避障找到最优路径。实验结果证明了该方法的可行性、有效性和鲁棒性。
2 机器人概述
2.1 机器人机械结构
所研究的机器人,如图1所示。该机器人在差动底盘部署有视觉传感器。通过该视觉传感器实现地图重建与导航算法[5]。
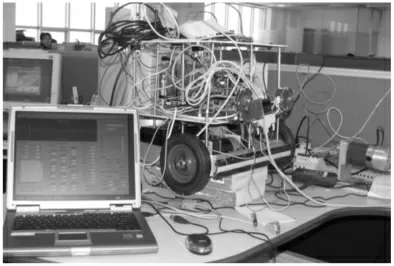
图1 机器人示意图Fig.1 Humanoid Arm Diagrammatic Sketch
在整个分析过程中,把机器人建模成轮子上的一个刚体,运行在水平面上[6-9]。在水平面上,机器人的运动的总维度为3,其中两个为其在平面坐标系中的横纵坐标,即在水平面上的位置;剩余的一个是机器人沿竖直方向的旋转方向,其对应的方向与水平面正交。注意,使用下标I是为了阐明该姿态的基是全局参考框架:
根据分量的变化描述机器人的运动,就需要把沿全局参考框架的运动映射成沿机器人局部参考框架轴的运动。通过单位正交的旋转矩阵来完成机器人当前位置的映射:
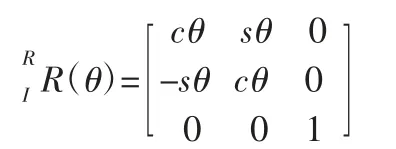
可以用该矩阵将全局参考框架{XI,YI}中的运动映射到局部参考框架{XR,YR}中的运动。这个运算由R
IR(θ)ξI标记,因为该运算依赖于θ的值:

2.2 柳长安法运动学模型
机器人本体采用双轮差动式驱动结构,其平面几何模型,如图2所示。
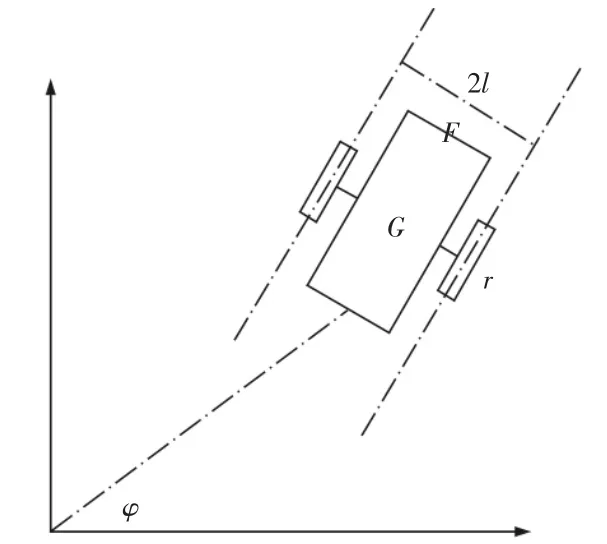
图2 机器人轮系结构的几何模型Fig.2 Geometric Model of Robot Gear Train Structure
双轮差动模型中主要包含的参数如下:移动平台上的关键点用F表示;移动平台的质心用G表示;驱动轮的间距用2l表示;驱动轮的半径用r表示;质心G与关键点F之间的距离用lG表示;平台转动的角度用φ来表示;左、右驱动轮的转角分别用θl与θr来表示。
对于移动平台的质心G,其速度为vG,作为一个矢量,其方向垂直于平台的轮轴,因此其在平面上两个坐标轴上的分量分别为:;消去νG得:
点F与点G有如下位置关系:
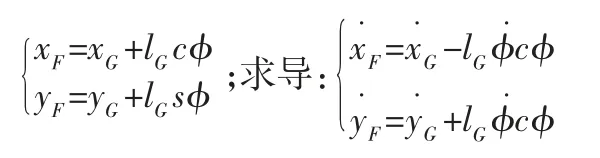
平台质心的速度与驱动轮转速的关系式为:
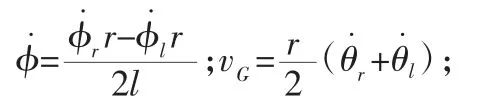
可以得到矩阵表达式为:
2.3 软件平台架构
基于提供更加便利的二次开发环境,同时兼顾软件的稳定性和可扩展性的目的,设计了软件平台架构。为机器人软件平台架构,如图3所示。这种架构模式同时对于室内和室外两种工作环境具有良好的兼容性。软件平台底盘程序支持轮式机器人、全方位机器人、蛇形机器人和双足机器人等。软件平台的设计流程为在一个给定的初始位置在运动的过程中,机器人使用里程表和陀螺测量环境,计算相对于初始状态的变化,确定当前位置。

图3 机器人平台系统Fig.3 Robot Platform System
机器人运动学模型通过测量轮轮机器人的角速度计算机器人的参考中心的移动速度和方向。通过传感器获得机器人在太空的位置,方向和环境信息,然后加工环境地图模型建立,找到最优路径,机器人安全移动到目标位置机器人通过自身的传感器来确定局部信息,通过局部信息与全局位置,推算得到机器人的轨迹。机器人根据全局地图位置更新并且修正地图信息进行导航控制。最终完成机器人定位于地图导航算法。
3 视觉导航
3.1 几何特征提取
假定测量值符合正态分布,对于被测点xi=(ρi,θi),可通过随机变量Xi=(Pi,Qi)来逼近测量值,其中:

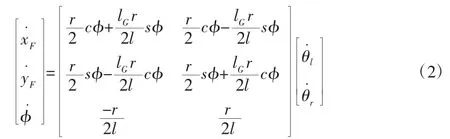
通常情况下,视觉雷达扫描到的环境信息可分割为多段近似直线,经由视觉测量数据在视觉扫描方向上可确定一条直线为:ρcos(θ-β)-r=0
式中:r—传感器坐标系原点与该特征直线的距离;β—原点到该
直线的铅垂线与横轴的夹角。定义评价函数:

求取直线的问题可转化为求取评价函数G的最小值。通过求解二元函数G的偏导数的零点,可得:
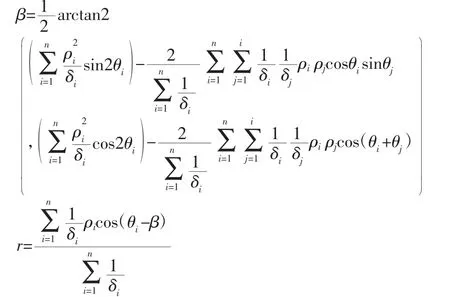
则由ρ及r可确定环境直线特征。
3.2 视觉导航建立
设定坐标系{B}为导航图中的参考坐标系,其零点位于界面的左上角,其x轴具有与坐标系{A}相同的方向,其y轴具有与坐标系{A}相反的方向。
可按照如下的方法将坐标系{A}与坐标系{B}中的点,建立映射:
(1)设定界面中心位置的坐标为(u0,v0),以此来表示机器人在坐标系{B}中的坐标;
(2)li在坐标系{A}与坐标系{B}中的坐标分别为(u0,v0)与(ui,vi),二者的关系为:

在式(4)中,j的作用是调整路标在界面上的像素距离。相邻路标的间距大于固定像素阈值是能够在导航图中提取到关键点的必要条件。设定(ui,vi)为li对应的像素坐标,则:
其中路标的数量为n.j的取值自1开始递增,直至有若干个量刚好未超出界面边界的临界情况。据上可分析得出,NLRP中的距离量的主要作用是建立路标在导航映射图中的相对位置,而不直接参与到导航中。由于定位和导航高度依赖于视觉系统进行,故作为视觉定位中的重要辅助量,像素坐标与世界坐标的比例尺需要实时地进行更新。
通过以上几个步骤可以建立机器人和路标在导航映射图中的相对位置关系。直接通过提取路标周围的点来提取关键引导点,方法如下:
(1)设li和li+1在坐标系{B}中的坐标为(ui,vi)、(ui+1,i+1)、li+1对应的关键点的坐标是。通常情况下关键引导点与路标一具有一个固定为d的间距。通过大量尝试,同时结合导航意像图的大小来分析,d的最佳选取区间为[10,40],选取40。
(2)具体的解分类讨论:
(a)若ui=ui+1且vi>vi+1,则uki+1=ui+1

(b)若vi=vi+1,则vk
i+1=vi+1

(c)若vi≠vi+1且ui≠ui+1,则:

综上,提取机器人前进路径的工作已经完成,据此形成了机器人的导航图。
4 机器人避障
4.1 超声避障系统
近几年,超声波传感器的技术趋于成熟,其测距的基本原理为通过超声发出及检测到回声的时间差来计算距离,这种方法通常被称为时间旅行法。超声波传感器具有抗干扰能力强、成本低等优势。机器人避障传感器的依靠的就是超声波传感器,但鉴于单超声波传感器对于障碍的检测仍然有一些无法克服的缺陷,如障碍物定位不准确、检测盲区、镜子缺陷等问题。需要设计一套完善的避障系统解决方案。用于克服单一超声传感器不稳定因素的障碍,在机器人的障碍物信息周围使用多个超声波传感器,每组超声波传感器均有两个工作模式分别为单循环模式和双周期模式,在微处理器的控制下,可以减少干扰和检测结果的畸变。
4.2 模糊避障系统
为了提高新机器人的避障性能,提出了一种具有速度反馈的模糊避障算法。本算法依靠超声波传感器对于未知环境进行感知建立模糊规则。模拟人类驾驶机动车的经验,根据障碍物的距离对于当前的输出速度进行研判,当距离障碍物很远的时候,机器人加速驶向目标;当靠近障碍物时,机器人降低速度并且根据障碍物的位置做出合理的运动决策,以便在避开障碍物的同时接近目标。为了避免避障规则的建立,在未知环境中存在8个分布障碍,如图4所示。

图4 实际传感器位置Fig.4 Actual Sensor Location
根据所述模型的特征,以面积重心法作为解模糊的手段。
为避障传感器的主控逻辑控制表,如表1所示。表中的障碍物区分图标为:(近处障碍物◎)、(远处障碍物●)、(无障碍物○)、(任意状态)。避障策略,如表1所示。
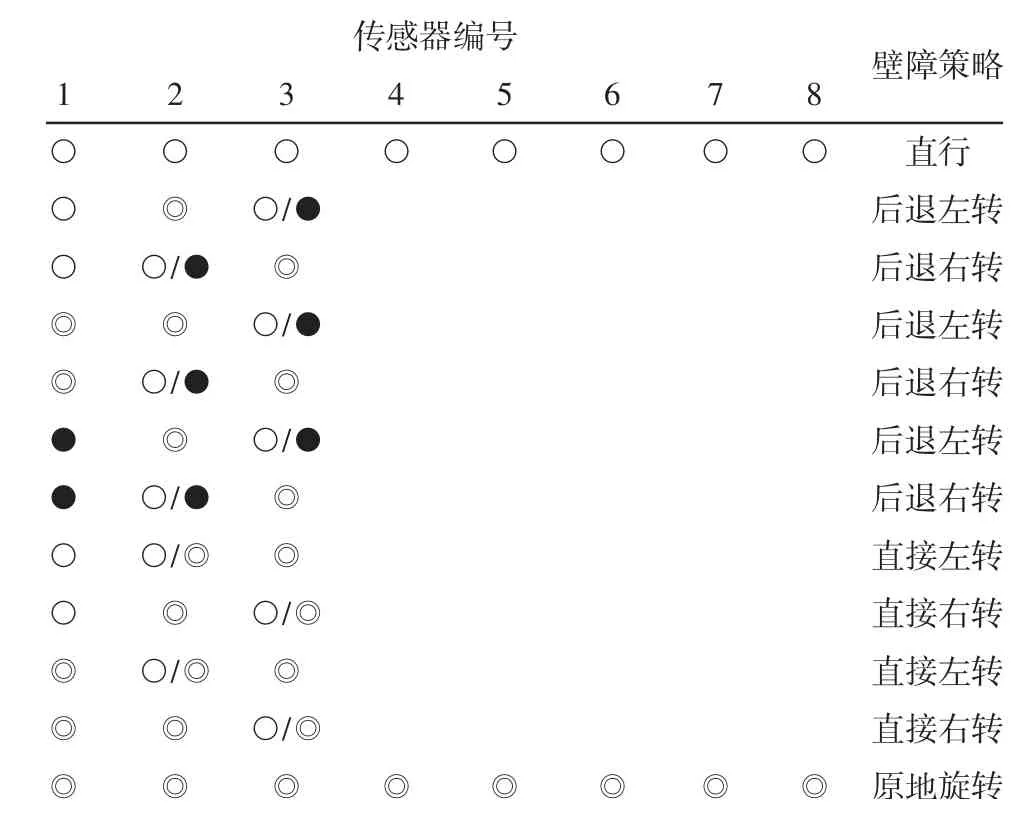
表1 传感器主控逻辑Tab.1 Sensor Master Logic
5 实验结论
首先对视觉导航效果进行了实验分析。机器人导航位置起始点,如图5所示。机器人导航过程位置点,如图6所示。从图中可以看到,导航算法的有效性通过成功定位得到验证。从实验结果,在路标的摆放位置理想的前提下,机器人可以依靠导航系统通过障碍物,并且运动到目标位置。
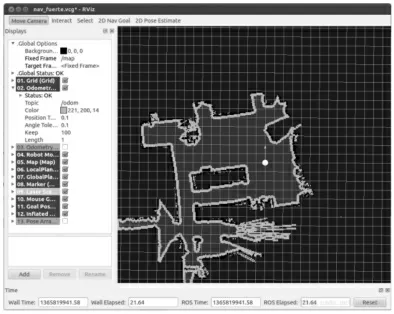
图5 机器人导航位置起始点Fig.5 Initial Position of Robot Navigation
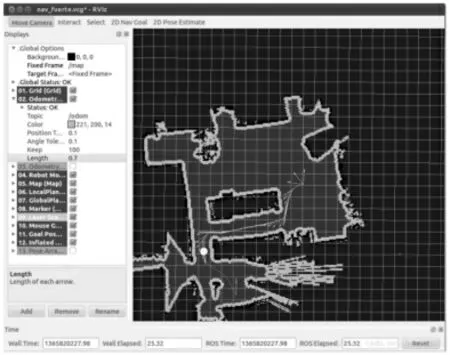
图6 机器人导航路程位置点Fig.6 Robot Navigation Location Points
6 结论
针对机器人导航问题进行了深入的研究。首先对底盘进行建模,实现了差动控制。基于行为规划的设计思想,兼顾考虑优雅退化能力,机器人控制软件的设计满足了适应实际复杂环境的初衷。其次在全局环境未知环境中进行导航,分析了感知周围环境状态和外部环境信息,从而实现路径规划运动控制决策。鉴于以往方法的优缺点,提出了一种依靠超声波传感器,多传感器数据融合感知,并结合速度反馈建立模糊规则,进而优化避障效果的先进避障算法。本算法,在传统方法的基础上,成功克服了超声波检测障碍、定位精度等方面缺陷。最后,机器人依靠路径规划实现自主避障,完成从起始目标到终点目标进行最优路径。
猜你喜欢
导航定位学报(2022年2期)2022-04-11
读写月报(初中版)(2021年12期)2021-05-25
装备制造技术(2020年11期)2021-01-26
动漫界·幼教365(中班)(2020年3期)2020-04-20
铁道通信信号(2020年9期)2020-02-06
创新作文(1-2年级)(2019年4期)2019-10-15
中学生数理化·七年级数学人教版(2019年4期)2019-05-20
中学生数理化·七年级数学人教版(2018年4期)2018-06-28
数学大世界(2018年1期)2018-04-12
中国卫生(2016年11期)2016-11-12
