
一种水下机器人系统设计
2020-05-21 10:48刘书金吕桂志
机械设计与制造 2020年5期
刘书金,刘 荣,郑 豪,吕桂志
(北京航空航天大学机械工程及自动化学院,北京100191)
1 引言
近年来,水下机器人逐渐成为机器人领域的一个热点,但在水质检测领域应用还比较少,通过对水质检测领域环境特点的分析,设计了一种专门适用于内陆湖泊的欠驱动水下机器人。它相对于全驱动机器人,结构简单,因此欠驱动水下机器人水引起了不少学者关注。尤其是在水下机器人路径跟踪方面,其中,文献[1]提出了基于自适应Backstepping的欠驱动的水下机器人三维航迹跟踪控制,文献[1]提出了基于自抗扰控制器的路径跟踪方法,这些方法都是可以实现路径的跟踪,但控制器参数较多,设计复杂。
导航系统相对于机器人是必不可少的,基于应用场景的限制,选用捷联惯性导航,该导航是最常见和广泛应用的导航系统,是一种自主式导航系统,工作时不依赖外界信息。但是长时间导航定位精度比较差,不满足要求,因此选用捷联惯性导航和GPS通过卡尔曼滤波进行数据融合的组合导航系统,提高定位精度。
水下机器人的动力学模型和运动控制器的设计是机器人轨迹规划的关键技术,以水下机器人为研究对象,建立了水下机器人六自由度的动力学模型并提出了水下机器人的控制策略。
2 水下机器人结构
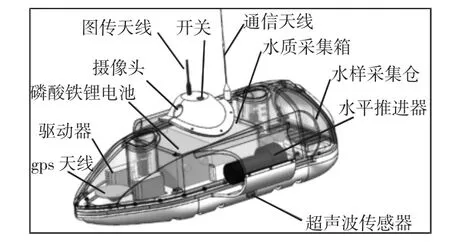
图1 整体结构Fig.1 The Overall Design
水下机器人的整体结构,如图1所示。它采用流线型的结构,两个水平推进器分别控制机器人的前进、后退及艏摇,两个竖直推进器控制沉浮及纵摇,摄像头的图像信息通过图传天线传回到地面控制中心,地面的控制指令与机器人的姿态等信息通过通信天线传输,水下超声波传感器采集障碍物信心,整个机器人下位机系统通过磷酸铁电池供电。机器人的密封位置主要在上壳体和底板之间,它的密封系统通过O型圈密封并涂以平面密封胶,可靠性更高。
2.1 推进系统
水下机器人本体的外形设计图,如图1所示。给出了水下机器人各个推进器布置的设计方案。因为大部分时间机器人在水面航行,所以本课题设计水下机器人采用舰艇式结构,机器人的横荡可以通过选择合适的偏航角度来避免。因为这款机器人主要在水库及内陆湖泊工作,这些地方相对来说风浪比较小,机器人的横摇会比较小,可以忽略掉。因此分别在机器人两侧布置各布置一个推进器,竖直方向布置两个推进器。为了方便推进器的安装和拆卸,推进器反作用力主要有推进方向上的作用力,以及扭矩,然而扭矩的作用的比较小,因而竖直方向上推进的安装主要有四根立柱完成。水平方向的推进器安装主要通过一个基座固定。
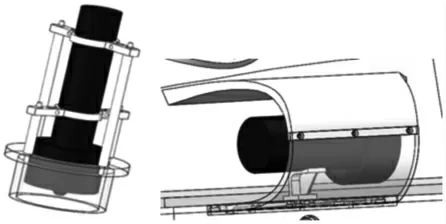
图2 推进器的安装Fig.2 The Fixation of Thrusters
2.2 密封结构
为减小机器人在航行时受到的水阻力,对机器人壳体进行了流线型设计,壁厚为10mm材料为ABS,底板起着连接上壳体和下壳体的作用,强度要求稍高,选用的材料为铝合金(1060),上壳体和底板之间为密封舱,因此在上壳和底板之间需要进行密封,密封性质为静密封,通过O型橡胶圈密封后在密封面涂以平面密封胶,以保证密封的可靠性。使用M8内六角螺栓联接(EQS)。底板和下壳体之间不需密封,直接用M8内六角螺栓联接。底板上的螺纹孔均为盲孔,以保证密封的有效性。
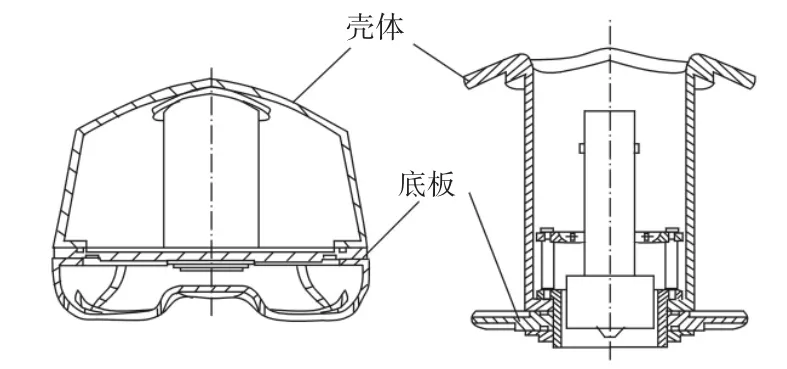
图3 机器人密封方法Fig.3 The Sealing Methods of the Robot
3 控制系统
水下机器人要自主完成众多关系复杂的任务,必须有一套完善的机制,使信息能及时顺畅的流通,使水下机器人的各个功能模块的作用能合理在时间和空间域上发挥作用。因此设计一套水下自主航行器运动控制系统体系是非常重要的,它会影响水下机器人结构以及行为功能的设计决策。
3.1 控制结构
水下机器人的推进系统由四个推进器组成,其中水平推进系统有两组推进器,这两组推进器由有感无刷电机和螺旋桨(螺旋桨旋向相反)组成,竖直方向上由无感无刷电机和螺旋桨组成(旋向相反),这四个推进器连接相应的驱动器,由一个主控制器(采用STM32)控制,这三者组成动力模块;水下超声波传感器、水浸传感器等由从控制器控制(采用ArduinoMEGA 2560),这些传感器和控制器组成采集模块;无线电台和GNSS等传感器以及STM32组成中央控制模块。中央控制模块负责接收上位机系统的指令,根据指令和传感器模块的数据进行路径规划和任务分配,并向传感器模块传达指令。水下机器人具体控制体系结构,如图4(a)所示。
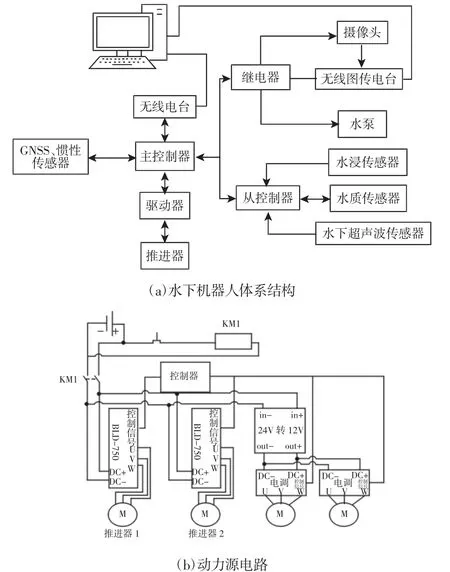
图4 机器人控制结构Fig.4 The Robot Control Structure
3.2 动力系统
水下机器人不仅需要控制系统,还需要为控制系统提供能源,即动力源。水下机器人的动力源主要由开关、电池、变压器等组成。自主航行器水平推进器器需要电压为24V,电流为30A的直流电,竖直推进器需要电压为12V,电流为40A的直流电。通信设备需要12V电源,控制系统需要5V电源,因此选用的电池为24V磷酸铁电池。相比普通电池(铅酸蓄电池等)具有能量密度更大、高温性能好、环保等特点。然后通过24V转12V直流变压器为竖直推进器和通信设备供电。由于推进系统所需要的电源电流较大直接通过开关控制电源很困难,所以先通过开关控制继电器,再由继电器控制推进器电源。动力源电路图,如图4(b)所示。
4 导航设计
4.1 惯性导航
惯性导航系统是一种不依赖于任何外部信号、也不向外部辐射能量的自主式导航系统,具有数据更新直高、短期精度高和稳定性好等优点。基于惯性导航系统的上述优势,因此选用捷联惯性导航系统,选用的惯性传感器为Imu200,它配备高精度三轴陀螺传感器、三轴加速度传感器和三轴磁场传感器,可以直接输出欧拉角、加速度。基于上述传感器,设计了捷联惯性导航的算法,如图5(a)所示。

图5 机器人导航Fig.5 The Robot Navigation
导航坐标系的建立为北东地,惯性导航速度、位置更新算法如下。
4.1.1 速度更新

速度方程为:

速度;L—水下无人航行器所在纬度;R—地球半径,这里将
速度的解算通过龙格库塔四阶方程完成。
4.1.2 位置更新
水下自主航行器在导航坐标系下的位置(x、y、z)可通过解下列微分方程完成:
至此已经给出了水下机器人捷联惯性导航的全部方程。
4.2 GPS导航
考虑到机器人主要在小区域内航行和执行任务,所以我们定位的导航坐标系的原点为机器人的起航点,X轴为正北方向,Y轴为正东方向,Z轴指向大地,而GPS采用的是WGS-84坐标系,需要将GPS接收机输出的机器人当前位置在WGS-84坐标系中的值(经度λ,纬度φ)转换到水下机器人在导航坐标系中的值(x,y)。查阅文献可知,地球赤道周长40075.36km,地球子午线长为39940.67km,设机器人的起航点在WGS-84中的表示为(λ0,φ0),则WGS-84坐标系到导航坐标系的转换公式为:

4.3 组合导航
目前GPS和捷联惯性导航的组合导航方案中主要可以分为四种结构:非耦合系统、松耦合组合、紧耦合组合、深或超紧耦合组合。基于这四种结构的优缺点,该方案采用的是松耦合组合。
GPS与惯性导航通过卡尔曼滤波进行数据融合,可分为直接滤波和间接滤波。直接滤波以各导航子系统的导航输出参数作为状态,可以较准确的反应真实状态的演变情况,但方程是非线性方程。间接法是以各个子系统的误差量作为状态、实现组合导航,它的系统方程可近似视为线性方程。因此选用间接法进行卡尔曼滤波来实现组合导航,组合导航示意图,如图5(b)所示。
5 水下机器人控制方法
5.1 控制算法
为简化机器人的运动控制,将水下机器人的6-DOF运动系统分为两个子系统:深控制系统和航向控制系统。
深度控制系统采用自抗扰控制器,这是由韩京清专家提出的控制模型,深度系统框图,如图6(a)所示。其中,对象为水下机器人竖直方向的推进器。

图6 机器人控制器Fig.6 Robot Controller
水平方向的位置控制通过两个PID控制器组成,水下机器人位置控制系统,如图6(b)所示。控制系统的输入为目标位置的坐标,通过控制量转换运算得到PID的输入,再将其输出转换成马达转速作为水下机器人的输入。
5.2 上位机设计
上位机系统通过C#编写,界面主要有四部分组成:登录控制方式选择系统、自动控制系统、手动控制系统和传感器数据读取系统,如图7所示。
5.2.1 登录界面
主要包括控制方式和通信端口的选择操作。在这个过程中检查与下位机通信,通信成功则进入控制界面,否则提示通信失败。
5.2.2 手动控制系统
当选择手动控制界面时,进入手动控制系统,如图9所示。该界面主要包括六部分:机器人位姿控制界面、机器人位置显示界面、图像显示界面、机器人当前运行情况、水质检测数据显示和下载、机器人控制参数修改。通过这个界面可以控制机器人前进、后退、转弯等动作。
5.2.3 水质检测界面
这部分主要用来读取水下机器人的存储数据,该界面主要包括资源管理器和文件内容。资源管理器读取文件夹和文件,文件内容显示.txt文件格式的内容。
图7 控制界面Fig.7 The Control Interface
6 实验
为了验证系统的有效性,根据设计方案,加工出了实物样机,并在水池中完成了相关实验。由于场地等试验条件的限制,选用水池大小为(4×2×0.8)m,实物样机,如图8所示。
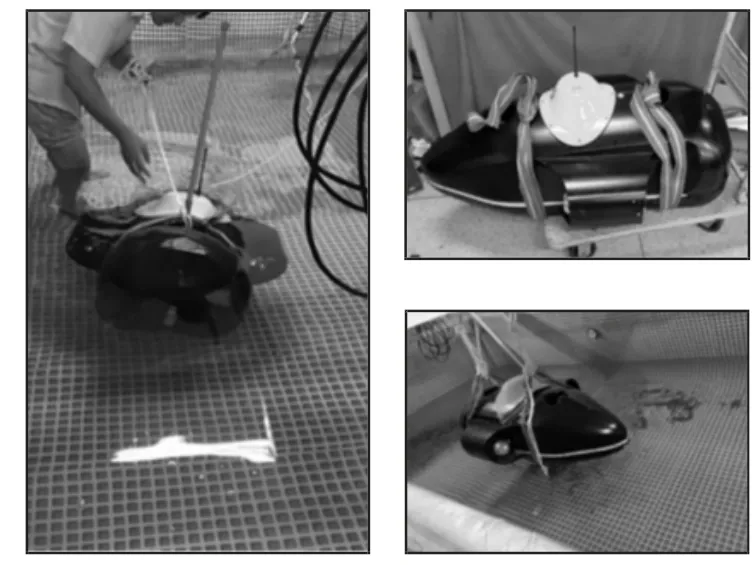
图8 机器人样机Fig.8 Robot Prototype
实验证明水下机器人可以在水中完成基本动作。如前进、后退、转弯等,控制算法可以满足实际工程的需要,定位精度(±0.5)m。
7 结论
针对现阶段的水下机器结构复杂,负载能力有限的问题,提出了一种水下机器人的组合导航算法和控制器,便于实际应用,经过仿真实验验证,满足机器人的控制要求,同时具有良好的动态特性和静态特性。提出一种用于水质检测的水下机器人结构,推进器的布置对于机器人的控制策略和控制方法,欠驱动水下机器人的推进器数量较少可以简化机器人结构,但会对机器人的控制造成困难。
猜你喜欢
舰船科学技术(2022年21期)2022-12-12
导航定位学报(2022年2期)2022-04-11
军民两用技术与产品(2021年7期)2021-10-13
舰船科学技术(2021年12期)2021-03-29
湖北农机化(2020年4期)2020-07-24
中国惯性技术学报(2019年3期)2019-10-15
当代陕西(2018年12期)2018-08-04
中学生数理化·七年级数学人教版(2018年4期)2018-06-28
数学大世界(2018年1期)2018-04-12
中国惯性技术学报(2015年1期)2015-12-19
