
ATC智能数据采集系统设计
2020-05-18 02:43尧永春韦学谦蔡枝尚
科技视界 2020年7期
尧永春 韦学谦 蔡枝尚


摘 要
工业机器人智能手腕装备(Auto Tools Change 简称ATC)是一种用于机器人快速切换末端执行机构的装置。可以通过快速切换不同的末端执行机构,使机器人更柔性、更高效的用于多种不同作业方式。本文针对ATC安全控制的需求,研究与设计了一种ATC智能数据采集系统。采用单片机直接采集读取各个传感器的数据,中控系统控制模块和数据采集系统、安全报警系统通过通讯总线进行连接,通过通讯模块接口与上位机连接,实现总体运行情况的实时监控。应用结果表明:此系统设计经济成本低、可靠性高、硬件安装简单,实现自动控制。
關键词
ATC;自动控制;中控;单片机;通讯总线
中图分类号: X703 文献标识码: A
DOI:10.19694/j.cnki.issn2095-2457.2020.07.087
Abstract
The industrial robot intelligent wrist equipment(ATC) is a kind of device used for the robot to quickly switch the end actuator.By quickly switching different end actuators,the robot can be more flexible and efficient for a variety of different work methods.According to the requirement of ATC safety control,this paper studies and designs an ATC intelligent data acquisition system.The single chip microcomputer is used to directly collect and read the data of each sensor.The central control system control module is connected with the data collection system and the safety alarm system through the communication bus.The communication module interface is connected with the upper computer to realize the real-time monitoring of the overall operation.The application results show that the system has the advantages of low cost,high reliability,simple hardware installation and automatic control.
Key Words
ATC;Automatic control;Central control;Single chip microcomputer; Communication bus
中国汽车行业自动化程度的提高,市场多元化的发展趋势,生产模式从单一车型大批量生产模式转为多车型小批量,生产线对柔性要求越来越高,对汽车生产线的机器人需配备 ATC的比例越来越高。目前汽车行业平均水平是每3-5台机器人需要配备1套ATC,预计2019年ATC国内汽车行业市场预测销量将达到17,000套。现有的ATC设备存较大安全隐患,安全系统靠电信号维持,断电特定情况下,调试过程易掉枪。大多数靠传统的检测方式检测ATC运行情况。在智能制造2025的需求下,ATC不仅要靠人工安全操作指引,更需要中控系统的统一监控。本系统设计主要采用了单片机和现场总线通讯模块实现对该系统集中控制,其中单片机系统主要实现IO控制和数据采集,然后再与组态软件通信,最后在中控界面上显示各部分工作状态。实现ATC集中自动控制,实现数据的实时监控,保证ATC稳定安全运行。
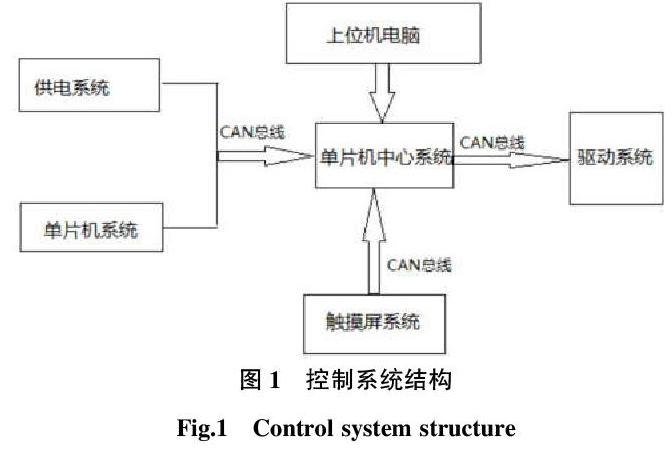
1 系统硬件结构分析
系统结构示意如图1所示,系统主要由上位机电脑、触摸屏、单片机系统和通讯设备组成。系统包含一个主控单元和多个分控制器,通过CAN总线通讯连接。数据采集单元负责获取各传感器的数据信息,将数据传输给发送给上位机,上位机软件负责对整体系统的全程监控。
2 系统控制分析
2.1 速度与距离测量系统
系统借助装于ATC部位上的传感器对ATC运行速度进行测量,传感器数据通过单片机数据采集模块进行采集,传输到单片机中心系统,最终传送到中控室内上位机系统。系统对位置进行确定是与位置传感器数据为前提的,最终检测结果传输到上位机系统。
本系统选用MMA7260加速度传感器测速测距,系统组成如图2所示。在抗干扰数据采集电路中将MMA7260三轴加速度传感器将速度信号转化成为电压信号,电压信号通过硬件电路进行滤波,滤波后信号输入到AD7705模数转换器中,信号输入到STM32运算处理器中处理,经过积分运算,获得ATC的运行速度。
通过将加速度传感器的一轴定位和机器运行所在的平面平行,就可以测试的机器在前进方向上的加速度。在设备转弯的时候,不影响设备速度的大小,也不影响距离的测量。利用STM32控制器的处理程序,编程将加速度积分就可以得到运行的速度,在程序中,利用积分程序进一步处理计算,就可以得到运行的轨迹路程。
2.2 自动语音播报系统
本系统提出新型的自动语音播报系统,通过无线接收机接收信息,从而解算出设备目前的运行信息,当ATC设备运行到指定工位时,不用人工干预,系统自动语音播报。在运行条件满足、运行异常和运行正常结束时发出语音提示,同时在显示屏上显示同类信息,给使用者一种全方位的提示与服务。
系统包含一个主控单元和多个分控制单元,通过通信总线连接。主控系统结合软件算法,能够尽可能准确的定位工位情况,各分控制单元连接显示终端和语音系统。
3 单片机与HMI通信
一般数据传送的通讯方式主要有:以太网连接、RS232/RS 485电缆连接、USB连接和MPI/DP连接等。本系统采用的单片机是一款紧凑型、经济性好、扩展功能强、模块化强、通讯功能强的控制器。连接CAN总线通讯模块,这样可实现全双工通讯。另外最大优点在于CAN总线接口,用户可通过该接口方便地对系统实现监控。还可通过此接口与其他系列单片机或其他设备间组网通讯,以便进行数据传输。
此系统单片机与HMI连接,HMI是主控端,单片机是从属端,在单片机控制器中,需要编写通讯中断服务程序,处理来自HMI的通信请求。本系统的通信参数设置为波特率19200,8数据位,1停止位,无校验位。首先,HMI发送一个请求给单片机控制器,控制器接收请求之后,给HMI回复一个通信响应。HMI需要检查控制器的响应是否超时,如果超时,HMI重新发送请求。如果通信超时,控制器初始化通信,等待HMI发送新的请求。
系统单片机与HMI通信成功后,只靠显示是不够的,很多单片机主板采集到的模拟量,数字量等数据需要进行保存功能,人机界面与单片机断电之后,等下次设备再次开机的时候,需要把之前的数据以一定的表格,曲线显示出来,需要断电数据保存功能。选择带有数据保存功能的HMI,设计简单,编程也方便,存储容量更大,还可以把相关采集数据以excel等文件的格式复制到U盘。
4 上位机系统分析
上位机系统是整个控制系统的核心,主要任务是监控ATC的运行状态,应用软件的方式,实现各执行机构联网、通讯及ATC的使用管理自动化和信息化。上位机电脑屏幕上显示ATC使用中各种状态信号(速度,距离,位置等)的变化。上位机發出的命令首先给下位机,下位机再根据此命令解释成相应时序信号直接控制相应设备。下位机不时读取设备状态数据,转换成数字信号反馈给上位机。ATC在应用过程中,如果发生故障时,上位机监控画面中应该有实时的报警信息,同时能对报警信息做出相应的处理。
本系统主要采用组态王软件构建上位机与下位机的通讯,为用户提供更方便可靠控制的操作界面,能够更方便更稳定地对现场信号的采集与控制。组态王软件作为一种工控组态软件已经得到广泛的应用,具有强大的硬件支持能力。组态王提供了通过PC机与单片机串口进行的数据通信驱动,需要根据组态王的串口设备配置向导就能完成设备的连接。设备配置如图3所示。
5 结语
随着智能制造发展理念的普及,智能中控系统取代了传统单机模式。ATC增加了监测模块,通过中控系统对设备实时监控,对钢珠锁紧次数、插拨次数、插拨时间等ATC使用过程中的关键数据进行采集,方便预防设备故障,进行维护保养及使用寿命预测。提高了自动化和信息化水平,减少设备维护成本。
参考文献
[1]李静.基于VB6.0的上位机与PLC实时通信技术[J].电子技术与软件工程,2019(08):41.
[2]周震.基于MCGS的多路电铃控制系统设计与实现[J].自动化与仪器仪表,2019(04):22-26.
[3]陈瑛,冯德海.基于无线传输技术的仓储温湿度测控与信息化系统[J].企业科技与发展,2018(04):79-82+86.
[4]王艳丽.关于CAN总线线缆测试的研究[J].现代工业经济和信息化,2019,9(02):131-132+135.
[5]马经权,蔡明,康国旗.基于无线传输的数据采集系统硬件设计[J].西部皮革,2019,41(10):4-5.
[6]方杰,胡春雷.基于51单片机的可视可听公交车自动报站系统的设计与实现[J].电脑知识与技术,2019,15(02):221-223.
[7]薛红艳,李伟岩.地铁列车自动报站控制逻辑对比及优化分析[J].现代城市轨道交通,2018(10):63-65.
[8]王茜.基于人因工程的轨道交通控制中心布局设计研究[D].北京交通大学,2018.
[9]刘浩,李春杰,罗黎明,胡思旺.智能电动执行器数据采集与控制系统设计与实现[J].仪表技术,2019(11):25-27.
[10]刘三平,龚伟.现场数据采集技术与智能制造系统的应用研究[J].数字通信世界,2019(11):182-183.
猜你喜欢
茶叶通讯(2022年2期)2022-11-15
茶叶通讯(2022年3期)2022-11-11
机械研究与应用(2022年4期)2022-09-15
测控技术(2018年6期)2018-11-25
测控技术(2018年8期)2018-11-25
车迷(2018年12期)2018-07-26
中国老区建设(2016年3期)2017-01-15
山东工业技术(2016年15期)2016-12-01
中国科技信息(2016年19期)2016-10-25
学习月刊(2015年3期)2015-07-09
