全速度区间内车体多重被动式吸振器减振方法
2020-05-18 03:59文永蓬宗志祥翁琳邹钰
中南大学学报(自然科学版) 2020年3期
文永蓬,宗志祥,翁琳,邹钰
(上海工程技术大学城市轨道交通学院,上海,201620)
城市轨道交通站间距短,车辆启动、制动和过弯频繁[1],致使车速变化较大,加剧了车体的振动。相对于其他减振方法而言,动力吸振器具有结构简单、减振性能好的优点[2],因此,利用动力吸振器对车体减振已逐渐成为研究热点[3-5]。近年来,国内外学者对动力吸振器进行了大量的研究[6-16]。周劲松等[6-7]设定车辆运行速度为200 km/h,在弹性车体上安装动力吸振器,提出了动力吸振器的具体设计方法并对其参数进行优化,获得了吸振器的最优的减振效果。GONG 等[8-9]在特定速度下将车下设备作为动力吸振器,对车下设备悬挂参数进行优化设计,从而降低了车体的弯曲振动。文永蓬等[10]考虑车轨耦合的作用对车体振动的影响,选取典型速度并设计出适用于轨道车辆车体的动力吸振器。这些研究都是在固定的车速下,利用单个被动式吸振器对对轨道车辆进行振动控制,但城市轨道车辆车速变化频繁,致使车体振动频率较大,针对固定车速减振的单个被动式吸振器易偏离最优设计状态,减振效果不佳,甚至在其他速度下会出现增振的现象[11]。为了克服单个被动式吸振器减振效果的缺点,适应外部条件的变化,采用主动式吸振器动态调节吸振器系统的振动特性是行之有效的方法。胡杰等[12]研制了一种黏弹性电磁式主动式吸振器,将永磁铁作为吸振器,通过改变电流来调节电磁铁和永磁铁之间的作用力,实现对主系统振动的控制。周伟浩等[13-16]建立了车轨耦合的多自由度振动系统,针对车辆的运行特点,设计了适用于轨道车辆的半主动式磁流变吸振器,实现了对车体在不同车速下的减振。虽然主动式吸振器减振方法能与外部频率的变化相协调从而实现减振,但是需要的能耗较大且控制系统往往价格昂贵,考虑到车下设备布置复杂和经济性,较难应用于轨道车体上。如果将被动式吸振器和主动式吸振器优点相结合,避免两者的缺点,将会大大提高减振性能,为此,本文作者提出适用于全速度区间内车体多重被动式吸振器的减振方法,采用被动式的减振结构,实现主动式吸振器的减振效果。
1 系统模型的建立
1.1 车轨垂向振动系统数学模型
车轨垂向振动模型如图1所示,图中,每节轨道车辆的车体、构架和轮对均视为刚体,多重被动式吸振器由多个单个被动式吸振器组成。车身浮沉和点头运动有2个自由度,每个转向架浮沉和点头运动有2 个自由度,每个轮对的垂向运动有4个自由度,多重被动式吸振器的浮沉运动有N个自由度,分别对应图中的Zc,φc,Zf1,φf1,Zt2,φt2,Zw1,Zw2,Zw3,Zw4和Zdi(i= 1,2,…,N)。钢轨选用长枕埋入式无砟轨道,钢轨的垂向位移采用Zr表示,其余参数如表1所示。
车辆第i轴轮对在t时刻轮轨动作用力Fwi为[17]

式中:Zwi(t),Zr(xwi,t)和qi分别为第i轴轮轨接触处车轮的垂向位移、钢轨的垂向位移和轨道不平顺度;KH为轮轨之间的接触刚度[18],

G为与车轮半径相关的接触常数;P0为单侧车轮静作用力。计算可得KH为1.3911 MN/m。
根据拉格朗日方程和轮轨接触关系获得系统动力学方程矩阵为

式中:下标c 和r 分别表示含多重被动式吸振器的车辆和钢轨;M,C,K和F分别为系统质量矩阵、阻尼矩阵、刚度矩阵和力矩阵;̇和Z分别为系统的振动加速度矩阵、速度矩阵和位移矩阵。
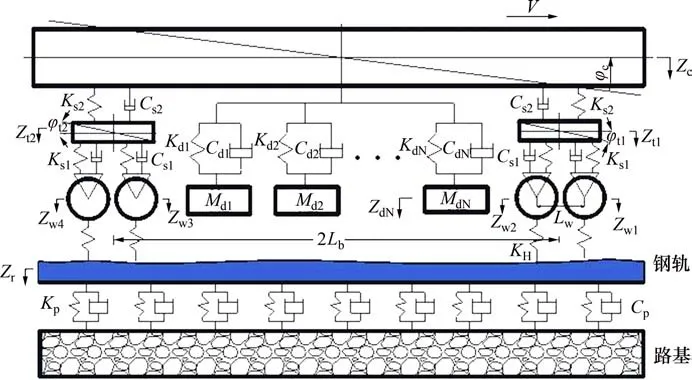
图1 车轨垂向振动模型Fig.1 Vertical vehicle-track vibration model
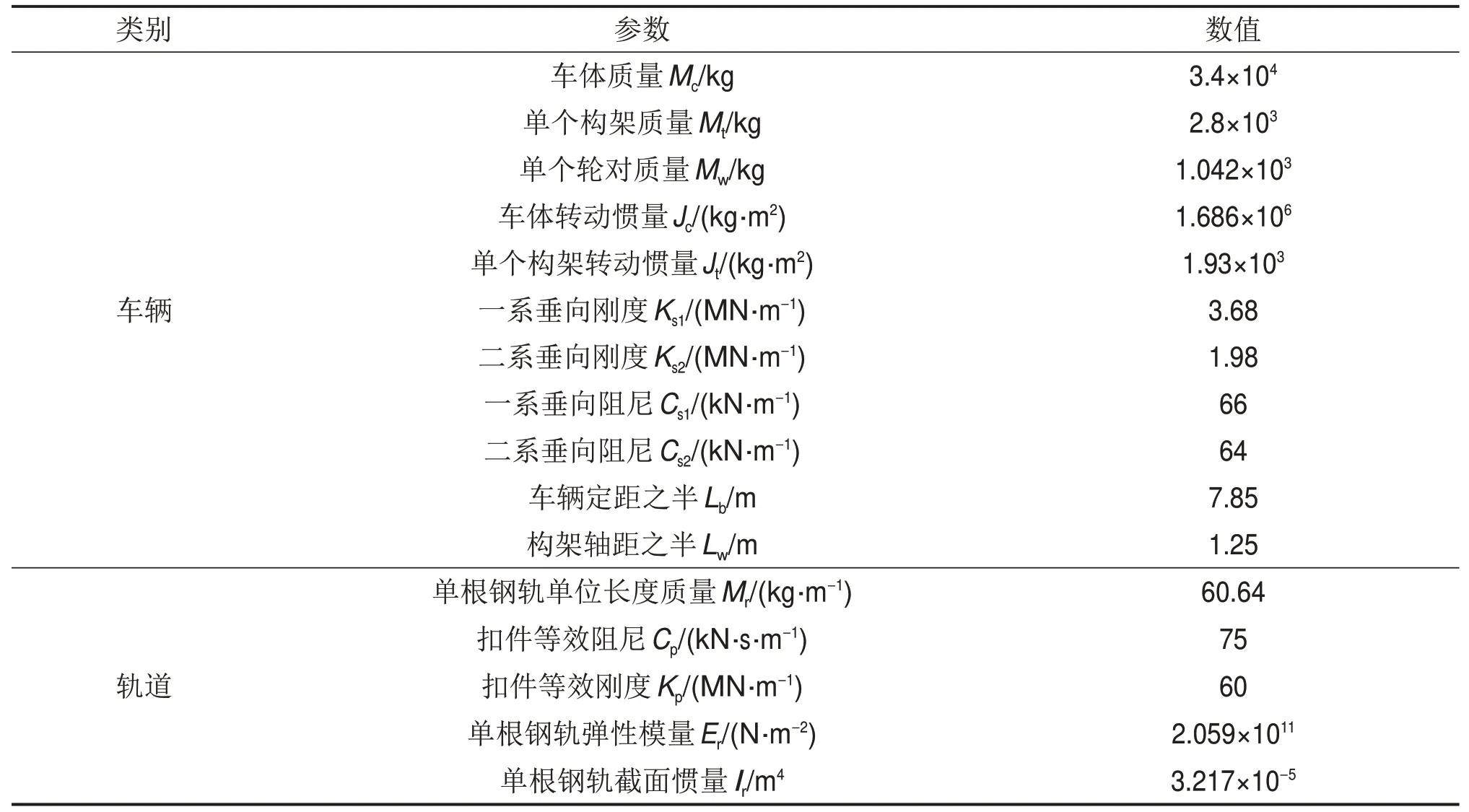
表1 车轨垂向振动模型参数Table 1 Parameter of vertical vehicle-track vibration model
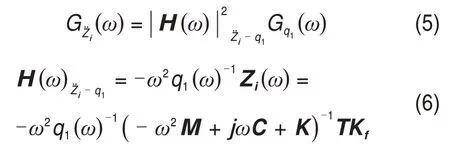
式(3)经过整理并进行傅里叶变换为

式中:Z(ω)为位移矩阵的傅里叶变换;Kf为系统转换矩阵;T为时滞矩阵;q1(ω)为系统激励输入向量。
由于加速度功率谱能够方便地分析轨道车辆系统的振动频率特性,令为振动系统各个部件以轨道不平顺激励q1(ω)为输入的加速度功率谱密度,各加速度响应量的功率谱密度为:
1.2 Sperling平稳性指标
目前,各国采用多种不同方法评定轨道车辆的Sperling振动和旅客舒适度,其中国际上较常用的是Sperling 平稳性指标[4]。因此,本文采用Sperling平稳性指标评价车辆的平稳性和吸振器的减振能力。
根据随机振动理论,运用式(5)可得采样频率ω处的振幅a(ω)为

式中:Gz¨1为车体加速度功率谱密度;Δω为采样频率间隔。
将幅值a(ω)代入Sperling 公式,在振动频率f处的平稳性指标Wz为

式中:F(f)为与振动频率有关的加权系数。
据此,可求得每个频率下的平稳性指标,然后利用式(8)得到整个频段内总平稳性指数为

1.3 多重被动式吸振器参数求解
将单个被动式吸振器分成N个质量相等的小被动式吸振器,构成多重被动式吸振器,当N= 1时,为一重被动式吸振器;当N= 2时,为二重被动式吸振器,依此类推。
根据吸振器减振原理[19],利用最优同调条件和阻尼条件[11],对车体多重被动式吸振器进行设计。
最优同调条件:

阻尼条件:

式中:ωc为主振系固有圆频率;ωdi为第i个吸振器固有圆频率;γi和ζi分别为第i个吸振器和主振系的固有频率比和阻尼比;μ为单个被动式吸振器与主振系的质量比。提高质量比μ可使动力吸振器在减振目标频率处具有更好的减振效果[10]。考虑到车下空间的限制性、经济性以及布置的难易程度,取μ=0.1。
根据式(10)和式(11),可获得第i个动力吸振器的刚度和阻尼。
式中:fci为第i个动力吸振器的目标频率。
综上可知,多重被动式动力吸振器的设计关键在于重数N和目标频率fci的选取。
2 一重被动式吸振器的局限性
轨道车辆在不同的车速工况下,车体具有不同的振动峰值频率,致使动力吸振器的固有频率不同。当典型车速v分别为30,50 和80 km/h 时,对应的车体振动频率分别为1.08,1.60 和1.49 Hz,此时,针对这3个频率进行动力吸振器的设计,目标频率fc1分别为1.08,1.60和1.49。不同速度下一重被动式吸振器减振效果如图2所示。
由图2 可知:3 种速度下的一重被动式吸振器均能有效降低车体振动峰值频率处的振动,但在峰值频率附近出现了略微的增振,尤其是当特征频率有2个峰值时,增振特别明显,因此,一重动力吸振器在典型速度运行下无法避免增振。
将为典型速度而设计的一重被动式吸振器应用于整个速度区间,用Sperling平稳性指标来考察车辆的平稳性,不同速度下不同吸振器车体Sperling平稳性指标如图3所示。
由图3可知:在绝大多数速度下一重被动式吸振器都能实现减振,但是,在速度为28 km/h附近时,3 种安装动力吸振器的车体Sperling 平稳性指标都大于未安装动力吸振器的Sperling 平稳性指标,这说明在该速度下,3种设计的动力吸振器不但没有减振效果,反而出现了增振的效果,这是因为一重被动式吸振器无法适应车体振动频率的变化,车体振动频率的变化使一重被动式吸振器偏离最优设计状态,减振效果恶化,甚至出现增振效果。可见,虽然一重被动式吸振器能够取得一定的减振效果,但是在整个速度区间下,仍然会出现增振情况,因此,一重被动式吸振器具有局限性,不能在整个速度区间内都实现减振效果,不适宜应用于车速变化频繁的轨道车辆。
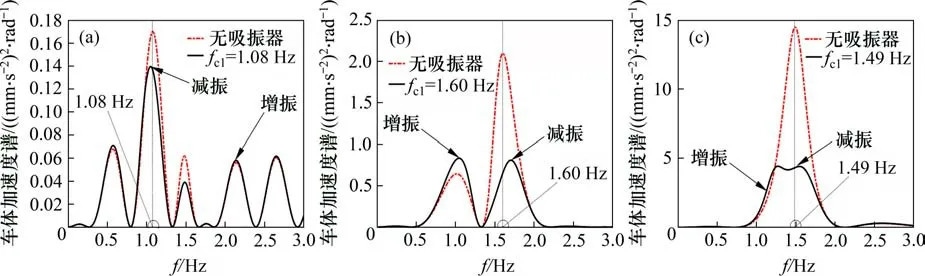
图2 不同速度下一重被动式吸振器减振效果Fig.2 Vibration reduction effect of passive vibration absorber at different speeds

图3 不同速度下不同吸振器车体Sperling平稳性指标Fig.3 Sperling stationarity index of different shock absorbers installed at different speeds
3 多重被动式吸振器的优化算法
3.1 目标频率的选取

图4 车体加速度谱峰值频率Fig.4 Acceleration spectrum peak frequency of vehicle body
为了进一步认识车体的振动峰值频率变化的频繁性,选择车辆的运行速度区间0~80 km/h,获得轨道车辆峰值频率,如图4所示。
由图4可知:随着速度的变化,车体的垂向振动峰值频率也会发生相应的变化,且频率变化范围保持在0.9~1.9 Hz,值得一提的是,在车速9,28 和55 km/h 附近,车体振动频率波动范围较大,甚至发生突变,这对吸振器的目标频率设计造成了困难。若能设置多个固有频率不同的动力吸振器对不同振动频率点进行减振,则会拓宽吸振器的吸振频。
将车辆振动峰值频率变化的区间0.9~1.9 Hz作为遍历区间,遍历多重被动式吸振器的目标频率fci,每隔0.1 Hz 计算1 次,则目标频率的组合有11N种。
为了更好地判断安装多重被动式吸振器在整个速度区间内有无增振效果,定义ΔWi为无动力吸振器的车体的Sperling平稳性指标和含多重被动式吸振器车体的Sperling平稳性指标的差值,

式中:i=1,2,…,80;W0i为无动力吸振器的车体的Sperling 平稳性指标;WNi为多重被动式吸振器的车体的Sperling平稳性指标。
因此,多重被动式动力吸振器目标频率fci获得算法如下:
1)确定多重被动式动力吸振器的重数N,即确定动力吸振器目标频率的组合个数。
2)遍历吸振器目标频率fci的所有组合,获得每种组合下的min{ΔWi} 。
①当min{ΔWi} < 0 时,安装多重被动式吸振器的车体出现增振效果,则目标频率fci不符合要求。
②当min{ΔWi} ≥0 时,安装多重被动式吸振器的车体未出现增振效果,则目标频率fci符合要求。
3.2 重数的选取
重数决定了目标频率的组合总数,进而影响符合要求的目标频率fci的组合个数。从N=2开始,利用目标频率的选取算法,设计出符合要求的多重动力吸振器。
当多重被动式吸振器的重数N=2,即采用二重被动式吸振器时,目标频率组合有121 种,获得其中,未出现的组合,这说明二重被动式吸振器的2个目标频率设计的组合都不符合要求,车体均出现了增振现象,因此,不仅一重动力吸振器的设计无法避免增振,二重动力吸振器的设计也存在局限性,无法满足轨道车辆车体减振的要求。
三重被动式吸振器的N=3,则目标频率组合有1 331 种,计算可得min{ΔWi},其中min{ΔWi}≥0的9种组合如表2所示。
由表2 可知,1 331 种组合中有9 种组合的min{ΔWi} ≥0,这说明三重被动式吸振器有9 种组合未出现增振的现象,此外,第1~3 组的min{ΔWi}相等,可以归为三重设计Ⅰ,即3 个被动式吸振器3 个目标频率分别为0.9,0.9 和1.9 Hz;第4~9组min{ΔWi}相等,可以归为三重设计Ⅱ,即3 个被动式吸振器3 个目标频率分别为0.9,1.0 和1.9 Hz。

表2 N=3时min{ΔWi} ≥0的9种组合的计算结果Table 2 Calculation results for nine combinations of min{ΔWi} ≥0 when N=3
综上可知:在全速度区间内,与一重和二重动力吸振器相比,三重动力吸振器能够满足车体都能减振的要求。
3.3 减振效果分析
将三重设计Ⅰ和三重设计Ⅱ与未安装吸振器的车体的Sperling平稳性指标进行对比,分析三重动力吸振器的减振效果。采用三重设计Ⅰ和三重设计Ⅱ后车体的Sperling平稳性指标图5所示。由图5可知:在整个速度区间内,安装三重被动式力吸振器的车体Sperling平稳性指标都小于未安装吸振器的Sperling平稳性指标,这说明三重被动式吸振器在整个速度区间内都有减振效果,实现了全速度减振,这意味着利用多重被动式吸振器减振方法,通过对目标频率fci进行设计,达到了主动式吸振器减振的效果。
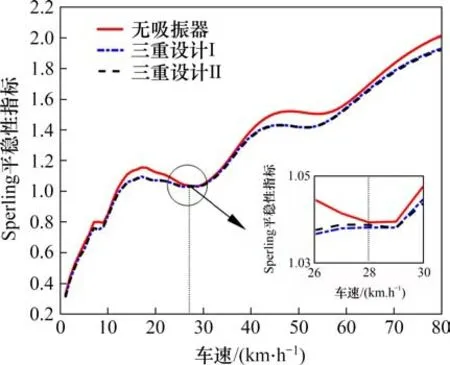
图5 采用2种三重设计后车体的Sperling平稳性指标Fig.5 Sperling stationarity index of vehicle body after two triple design
4 多重被动式吸振器全速度减振原因
三重被动式吸振器目标频率选取空间为0.9,1.9和1.0 Hz,并将0.9,1.9和1.0 Hz依次称为最小峰值频率、最大峰值频率和典型频率。根据三重被动式吸振器符合要求的9种组合,在相同附加质量下,再增加1个吸振器,即进化为四重被动式吸振器,其目标频率共有99种组合,如表3所示。
由表3可知:三重被动式吸振器进化为四重被动式吸振器过程中,符合设计要求的共有18 种组合。不符合要求的组合为81 种,目标频率不是最小峰值频率0.9 Hz、最大峰值频率1.9 Hz和典型频率1.0 Hz的组合都被淘汰,这说明多重吸振器的目标频率必须是最小峰值频率、最大峰值频率和典型频率。增加1 个吸振器后,符合要求的组合从9种增加到18 种,说明吸振器重数越多,符合要求的组合越多,这是因为三重被动式吸振器的3个目标频率已经包含车体振动的最小峰值频率和最大峰值频率,增加1个目标频率会更好地将吸振器的频率在车体振动频率范围内分散开来,提高系统的鲁棒性。此外,18种组合可以归为3种设计,依次为四重设计Ⅰ(0.9 Hz,0.9 Hz,0.9 Hz,1.9 Hz)、四重设计Ⅱ(0.9 Hz,0.9 Hz,1.0 Hz,1.9 Hz)和四重设计Ⅲ(0.9 Hz,1.0 Hz,1.0 Hz,1.9 Hz)。
将上述5 种设计分为2 种工况。工况1,在三重设计Ⅰ的基础上增加1 个最小峰值频率0.9 Hz 的动力吸振器,即为四重设计Ⅰ;工况2,在三重设计Ⅱ的基础上依次增加1 个最小峰值频率0.9 Hz 和典型频率1.0 Hz的动力吸振器,即分别为四重设计Ⅱ和四重设计Ⅲ。利用Sperling 平稳性指标对2 种情况进行减振效果分析,结果如图6所示。
由图6(a)可知:在整个速度区间内,三重设计Ⅰ和四重设计Ⅰ都有减振效果,无增振现象。此外,在车速为28 km/h附近,四重设计Ⅰ的减振效果要优于三重设计Ⅰ的减振效果,但在车速为50 km/h 附近,四重设计Ⅰ的减振效果被削弱。结合图4 中车体的振动峰值频率分析,出现这一现象的主要原因是,车速在28 km/h 和50 km/h 附近,车体振动峰值频率分别接近0.9 Hz 和1.9 Hz,四重设计Ⅰ增加了1 个针对0.9 Hz 处减振的吸振器,使得0.9 Hz处的减振效果加强,在相同附加质量下,1.9 Hz处的减振效果减弱。图6(b)与6(a)所示结论基本一致,唯一不同的是在保证无增振现象的前提下,四重设计Ⅱ和四重设计Ⅲ的减振效果优于三重设计Ⅱ的减振效果的速度变为29 km/h 附近。这是因为无论是三重设计还是四重设计,都有动力吸振器针对典型频率1.0 Hz 处减振,1.0 Hz 对应图4中的车速为29 km/h附近,而其他的动力吸振器依然针对车体振动的最小峰值频率0.9 Hz和最大峰值频率1.9 Hz处的减振,在针对不同频率处减振的各个吸振器共同作用下,车体在整个振动频率范围内都未出现增振现象。这说明多重被动式吸振器的目标频率要包含车体振动的最小峰值频率0.9 Hz和最大峰值频率1.9 Hz,而且只有共同协调作用才能从全局的角度实现全速度减振的效果。
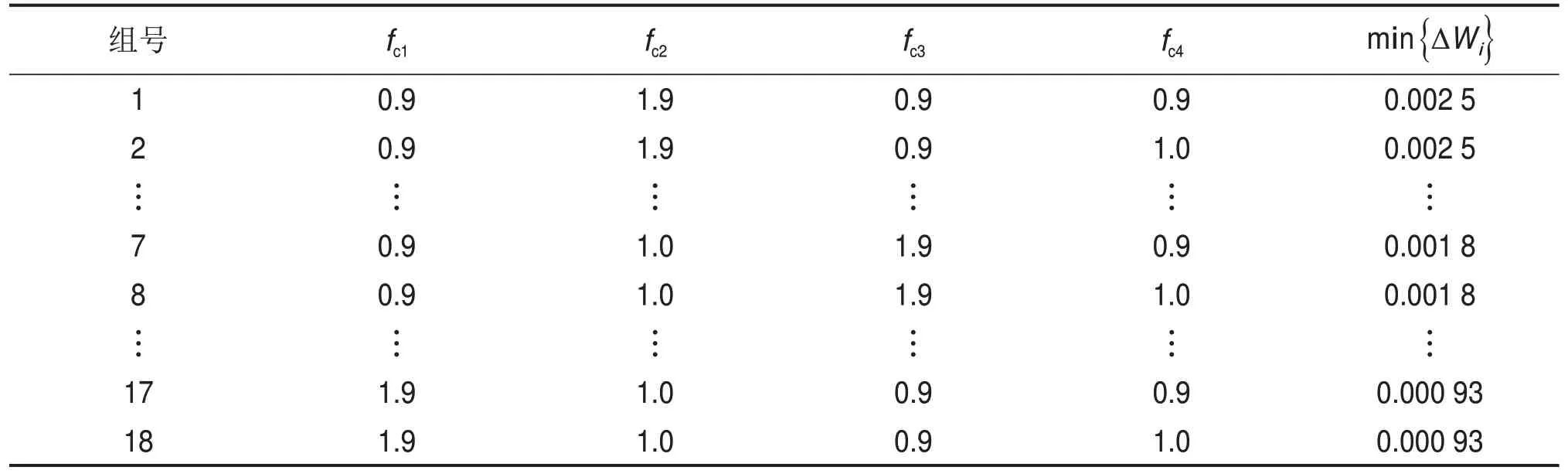
表3 N=4时min{ΔWi}≥0的18种组合的计算结果Table 3 Calculation results for 18 combinations of min{ΔWi} ≥0 when N=4

图6 不同工况下车体的Sperling平稳性指标Fig.6 Sperling stationarity index of vehicle body in different cases
为了进一步分析三重设计组合和四重设计组合在保证不增振的情况下减振效果出现差别的原因,利用DVA减振指标[10]对5种设计进行评价,如图7所示。

图7 5种设计的DVA减振指标Fig.7 DVA indicators of five designs
由图7可知:三重设计Ⅰ和四重设计Ⅰ的DVA减振指标要小于其他3 种的DVA 减振指标,这说明三重设计Ⅰ和四重设计Ⅰ在整个速度区间的减振能力较差,这是因为三重设计Ⅰ和四重设计Ⅰ的减振频率只有车体振动的最小峰值频率0.9 Hz和最大峰值频率1.9 Hz,虽然包含了2个容易增振的频率,但是在典型频率1.0 Hz处的减振效果较差。此外,三重设计Ⅱ和四重设计Ⅲ的减振能力基本一样且均优于其他3种设计的减振能力。这是因为2种设计在包含最小峰值频率0.9 Hz和最大峰值频率1.9 Hz的同时,还需要针对典型频率1.0 Hz 处进行减振。因此,多重动力吸振器的目标频率包含车体振动的最小峰值频率波和最大峰值频率的同时,还必须适当的兼顾典型频率,才能够在全局上实现更好的减振效果。
综上可知,多重被动式吸振器能够通过设置多个固有频率不同的动力吸振器,不仅针对车体振动的最小峰值频率0.9 Hz 和最大峰值频率1.9 Hz,而且针对典型频率1.0 Hz,对这些不同振动频率点进行减振,拓宽了吸振器的吸振频带,这就是多重被动式吸振器能够实现全速度减振的原因。
5 有效性验证
目前,各国评定乘客对车体舒适度的指标有很多种,其中较为常用的是由国际铁路联盟(UIC)提出的UIC513 舒适度指标[20],因此,采用此指标对车体多重动力吸振器减振方法的有效性进行验证。
图8 所示为三重设计Ⅰ和四重设计Ⅰ的舒适度指标与无动力吸振器的舒适度指标对比。由图8 可知:随着车速提高,3种状态下车体的舒适度指标逐渐增大,但均小于1,说明3 种状态下的乘坐舒适度都保持在优级;在全速度区间内,三重设计Ⅰ和四重设计Ⅰ的舒适度指标接近,均小于无动力吸振器的舒适度指标,这说明多重动力吸振器在整个速度区间对车体都有减振效果,即便在车速28 km/h 附近,也未出现增振效果。对于城市轨道车辆而言,在轨道车辆速度变化频繁的情况下,多重动力吸振器能够兼顾多个减振目标频率,使车辆在整个速度区间都实现了减振,未出现增振的情况,提高了运行品质,这是单个动力吸振器无法做到的。在全速度区间内,通过舒适度指标的对比,证明了车体多重动力吸振器减振方法的有效性。
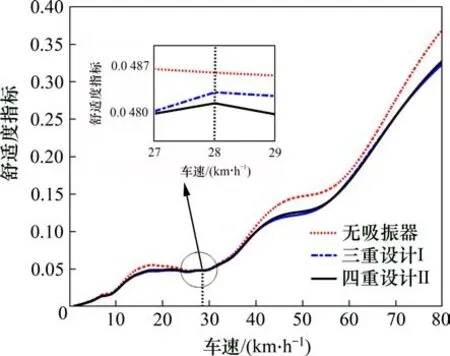
图8 三重设计Ⅰ和四重设计Ⅰ的车体舒适度指标Fig.8 Vehicle body comfort indicators of triple design Ⅰand quadruple design Ⅰ
6 结论
1)轨道车辆振动频率受车速影响变化频繁,一重和二重被动式吸振器对车体的减振效果易出现恶化,具有一定局限性,因此,一重和二重被动式吸振器不适宜应用在振动频率变化较大的城市轨道车辆上;三重以上被动式吸振器的重数越多,能够针对的目标频率越多,出现符合要求的目标频率组合越多。
2)多重被动式吸振器的设计关键在于吸振器的重数和目标频率的选取,吸振器重数N≥3,目标频率的选取要包含最小峰值频率和最大峰值频率,还需要兼顾典型频率,只有共同协调作用才能够从全局的角度实现较好的减振效果,因此,尽管采用被动式的减振结构,却能通过精心设计实现主动式吸振器的减振效果。
3)多重被动式吸振器在全速度区间内都能减振的原因在于多个固有频率不同的动力吸振器具有不同的减振频率,能够针对不同振动频率点进行减振,从而拓宽了动力吸振器的吸振频带。
猜你喜欢
城市轨道交通研究(2022年2期)2022-11-18
老年医学研究(2021年5期)2022-01-19
建材发展导向(2021年19期)2021-12-06
建材发展导向(2021年24期)2021-02-12
科技与创新(2020年19期)2020-10-09
现代商贸工业(2020年24期)2020-07-17
铁道运营技术(2020年2期)2020-04-08
电子技术与软件工程(2018年6期)2018-02-23
专用汽车(2016年12期)2016-02-11
山东工业技术(2014年20期)2014-10-21