基于BP神经网络的采空区激光探测环境误差修正
2020-05-18 03:59侯朋远徐帅梁瑞余纪晓飞
中南大学学报(自然科学版) 2020年3期
侯朋远,徐帅,梁瑞余,纪晓飞
(1.东北大学深部金属矿山安全开采教育部重点实验室,辽宁沈阳,110819;2.赤峰山金红岭有色矿业有限责任公司,内蒙古赤峰,025450)
采空区三维激光探测利用激光抗干扰性强、传输精度高等特点,可对采空区进行精准调查以获取三维几何特征,具有探测效率高、探测数据处理简便、可视化效果好等优点[1-2],被广泛应用于地下金属矿山的空区形态探测[3-5]。在实际探测中,由于设备因素、人为因素和环境因素综合影响[6],获取的点云数据往往存在一定误差,导致采空区三维激光探测结果失真,对空区治理、残矿回收、贫损控制和安全监管等有严重影响,不利于矿山安全、高效、经济开采[7-9]。国内外学者针对设备系统误差和人为偶然误差进行了大量研究,采用简易六段法[10]、三角剖分生长算法[11]和异常点云过滤[12]等方法,对探测仪器系统误差中的测距误差、倾角误差、点位误差、激光光斑和异常点云数据进行了分析,并提出了相应的系统校正方法和模型误差修正公式;基于目标物体的表面粗糙度[13]、大气衰减效应[14]和光源频率[15]等影响因素开展了探测误差的研究,定性描述了上述误差源对三维激光探测精度的影响。但是,矿山生产过程中采空区通风条件较差,在高温、高湿的综合作用下,凿岩爆破等生产过程产生的大量炮烟与粉尘悬浮于空区内部形成固液多相系类气溶胶物质[16],对激光能量造成折射和衰减,严重降低了采空区三维激光探测数据的准确性。目前针对地下金属矿山高温、高湿、多粉尘复杂环境影响因素对三维激光探测误差的研究较少,熊立新等[6]结合井下误差源,开展了采空区三维激光探测现场试验,基于灰色关联理论分析了各影响因素对点云精度的影响权重,提高了探测的精度。但由于各个矿山生产环境不同,现场试验所得结论难以推广应用于其他矿山,其研究结果受到了限制。徐帅等[17]针对相对湿度和粉尘质量浓度进行了室内单因素探测数据误差分析修正试验,并提出了相应的误差修正公式,在一定程度上提高了探测结果的准确性。但在实际探测环境中,探测精度往往受温度、相对湿度和粉尘质量浓度等综合因素影响,单因素影响试验结果的准确性有待进一步提升。鉴于此,本文作者针对井下高温-高湿-多尘的复杂探测环境,设计了环境模拟实验装置,基于正交试验设计方案,开展温度、相对湿度和粉尘质量浓度综合环境下探测误差分析与修正实验;建立探测误差的BP神经网络预测模型,并将预测模型应用于某铅锌矿的空区探测。
1 试验设计
1.1 正交试验设计
采空区三维激光探测误差的环境影响因素主要包括温度、相对湿度和粉尘质量浓度[6]。为分析上述因素对探测误差的影响程度,每个因素设置8个水平,得到正交试验因素水平表,如表1 所示。采用SPSS 软件Orthogonal Design 功能完成L64(83)正交试验方案设计。
1.2 试验设备与材料
采空区三维激光探测设备为加拿大Optech 公司CMS V400,测量距离范围为0.15~150.0 m,距离分辨率为1.0 mm,垂直扫描角度范围为0°~360°,水平扫描角度范围为0°~290°。

表1 正交试验因素水平设计表Table 1 Factors and levels of orthogonal experiments
CMS V400采用以探头激光发出点为坐标原点的内部坐标系统。三维激光扫描坐标如图1 所示,其中,x轴为沿探头轴线方向,取扫描方向为正向,坐标系符合左手坐标系。CMS 测点坐标的计算公式如下:

式中:s为探测点到激光发出点的距离,m;α为探测点和激光发出点连线与扫描面的夹角,(°);β为探测点和激光发出点连线在xy平面上的投影与探头轴线方向的夹角,(°)。

图1 三维激光扫描坐标示意图Fig.1 3D laser scanning coordinate diagram
实验粉尘选用化学性质不活泼、绝缘防爆性能良好的滑石粉,粉尘质量浓度测定仪为Personal Data RAM(pDR-1000),质量浓度测量范围为0.001~400.000 mg/m3,响应粒径范围为0.1~10.0 μm。超声波加湿器的震荡频率为1.7 MHz,水雾粒径低于10.0 μm。温度记录仪的测量范围与精度分别为-40.0~85.0 ℃和0.1 ℃;湿度记录仪的测量范围与精度分别为0~100.0%和0.1%,恒温控制系统的控制范围与精度分别为0~50.0 ℃和0.1 ℃。
1.3 试验装置与方法
复杂采空区探测环境模拟装置如图2所示,主体架构为201 型不锈钢管焊接而成的梯形密封体。前面板选用透明有机玻璃板制成,中间预设直径为30 cm的圆孔,以便观察实验过程。其余各面板均选用厚度为1 cm 的木板加工制作,其中后面板(目标面板)涂有白色反光材料,以提高激光的反射率。底部面板嵌套有6个可调节功率的风扇,其上方覆盖均匀布满圆孔的同尺寸风箱,以便产生均匀稳流的气体进行扬尘。顶部面板预留有2个通风口和4个粉尘加料口,保证实验过程中粉尘质量浓度达到允许范围内的动态平衡。左右面板分别安装有1 台pDR-1000 粉尘质量浓度测定仪,以监测粉尘质量浓度的变化情况。装置内部布置2台超声波加湿器、1台温湿度记录仪和1套恒温控制系统,以保证实验过程温湿度达到允许范围内的动态平衡。
实验前,通过Nivo2.M全站仪对激光探头中心靶标和实验装置顶点坐标进行校正,保证所有探测点云数据坐标系的一致性。

图2 复杂空区环境模拟装置三维图Fig.2 Three-dimensional diagram of environment simulator for complex goaf
在室内湿度≤50.0%、室内粉尘质量浓度≤10.0 mg/m3和室温25 ℃下,以1×1的扫描精度对目标面板进行三维激光探测,作为实验组的标准参照,确定误差允许范围。
根据正交试验设计方案,针对不同温度、相对湿度和粉尘质量浓度的实验条件开展实验组探测,且每组探测重复3次,计算均值以降低偶然误差。探测误差通过点云平均误差比表征:

式中:δ为点云距离误差比,%;d为探测点和标准点之间的距离,m;D为激光发出点和标准点之间的距离,m。
通过式(2)计算可得m个距离误差比δ1,δ2,δ3,…,δm,通过格拉布斯准则剔除n个异常值后,可得m-n个距离误差比,则有

2 试验结果与分析
试验结果如表2所示。从表2可见:评价指标点云平均误差比的变化范围为1.87%~86.33%。
2.1 探测误差的单因素敏感性分析
选取显著性水平α=0.05,运用方差分析理论分析各影响因素对探测误差的显著性,结果如表3所示。由表3可知:粉尘质量浓度和相对湿度的显著性sig 值为0,表明二者对点云平均误差比的影响都非常显著。根据Mie球形粒子散射经典理论[18]可知,因为空气中的水对激光的吸收作用,将光子能量转化为化学势能或热动能以及悬浮颗粒对激光的反射、折射作用,改变激光传输方向,从而导致激光衰减。
由表3还可知:相对湿度的F(25.436)大于粉尘质量浓度的F(14.172),说明与粉尘质量浓度相比,相对湿度对点云平均误差比的敏感性更高;温度的显著性sig 值为0.744(>0.05),表示其对点云平均误差比的影响不显著。
各影响因素对点云平均误差比的敏感性从大到小为相对湿度、粉尘质量浓度、温度。根据方差分析理论,显著性强的因素应优先考虑,而不显著的因素可以在任意水平上选择,因此应优先考虑相对湿度和粉尘质量浓度,可以不考虑温度的影响。
2.2 探测误差的单因素影响规律
为反映各影响因素对评价指标的影响规律,分别选取表2中粉尘质量浓度为10.0 mg/m3和相对湿度为50.0%时的正交试验结果,分析各影响因素与点云平均误差比关系,结果如图3所示。
从图3可知:点云平均误差比与相对湿度和粉尘质量浓度呈非线性正相关。随相对湿度升高,点云平均误差比呈“S”型趋势增长,当相对湿度介于75.0%~85.0%时,增长速率明显加快。随粉尘质量浓度增大,点云平均误差比以40 mg/m3和100 mg/m3为节点呈三段式线性增长,当粉尘质量浓度介于40~100 mg/m3时,增长速率最快,粉尘质量浓度大于100 mg/m3时次之,粉尘质量浓度小于40 mg/m3时最低。由此可见,采空区三维激光探测精度对粉尘质量浓度和相对湿度响应范围有所变化,且相对湿度对评价指标的调节范围相对粉尘质量浓度更大,这与方差分析结果相符。
3 BP神经网络模型预测探测误差
采空区三维激光探测误差与高湿多尘等环境影响因素呈现高度非线性,采用传统统计回归方法无法建立相应的数学模型来定量化计算探测误差。BP 神经网络是一种信息正向传递和误差反向传播的多层前馈网络,具有强大的处理非线性问题的能力[19]。本文基于BP 神经网络,建立探测误差定量化预测模型,实现高湿多尘综合环境下采空区三维激光探测误差的预测与分析。
3.1 BP神经网络模型选取
BP神经网络模型结构如图4所示。输入层中,以相对湿度和粉尘质量浓度2个因素作为网络输入因子;隐含层中,神经元数目决定训练函数收敛程度、训练时长以及训练误差,因此,确定神经元数目对模型至关重要。HECHT-NIELSEN等[20]指出神经元数目一般为(2k+1)时最优,其中k为网络输入因子的个数(即神经元数目为5),为保证BP神经网络模型预测精度,选取神经元数目为2~13;输出层中,以点云平均误差比作为网络输出因子。
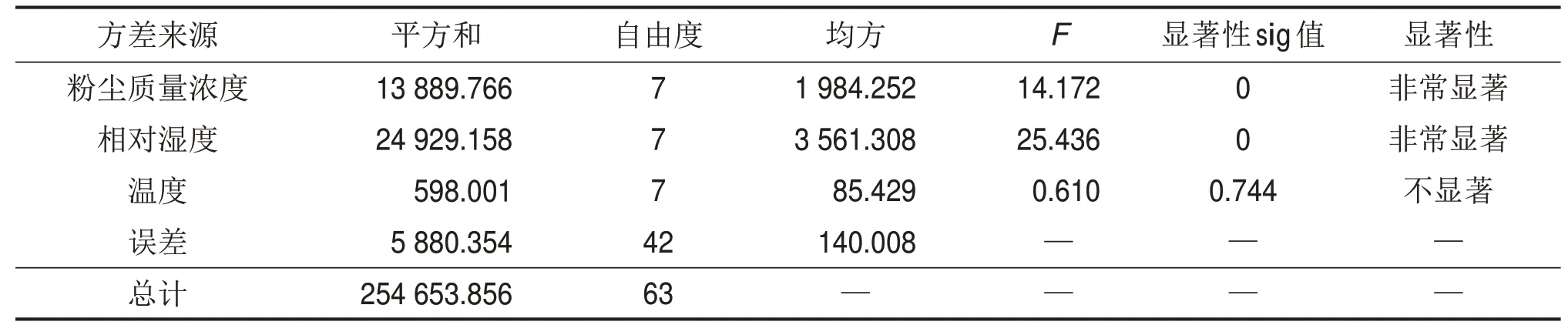
表3 正交试验结果方差分析表Table 3 Anova table of orthogonal test results
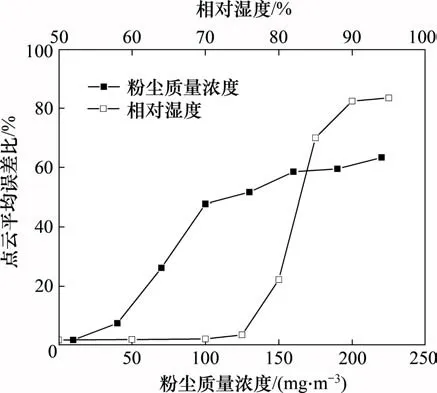
图3 影响因素与评价指标的关系Fig.3 Relationship between influencing factors and evaluation indexes

图4 BP神经网络模型结构图Fig.4 Structure diagram of BP neural network model
3.2 数据归一化处理
为消除各网络输入因子的奇异量纲,提高BP神经网络学习速度和收敛效率,通过式(4)对样本数据进行归一化处理,将其转变为具有可比性的数据,分布于[0,1]区间内。
式中:Pi为归一化处理结果;Pk为原始样本数据;Pmax和Pmin分别为原始样本数据的最大值和最小值。
3.3 探测误差的预测与检验
基于MATLAB R2018b平台,选取正交试验结果中的54 组样本用于网络训练;10 组样本用于检验分析和精度评估。设置隐含层传递函数为正切S型非线性传递函数TANSIG 函数,训练函数为Levenberg-Marquardt算法的TRAINLM函数,学习函数为带动量项的LEARNGDM函数,训练迭代次数为1 000 次,目标误差为1.0×10-6。针对神经元的不同数目采用相对误差进行BP神经网络模型精度优劣评估,计算公式为
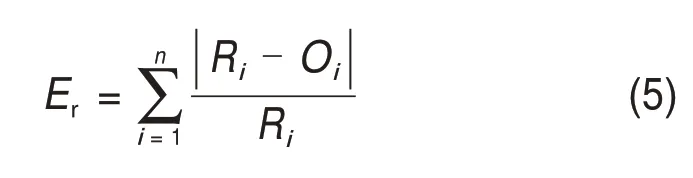
式中:Ri为正交试验实测值,%;Oi为BP 神经网络预测值,%;Er为相对误差,%。
计算结果如表4所示。从表4可见:当神经元数目为6 时,BP 神经网络模型预测精度最高,预测值和实测值平均相对误差为1.80%。根据10 组检验样本的实测值和预测值,建立评价指标结果对比分析图,并进行线性拟合,结果如图5 所示。由图5 可知:点云平均误差比的校正决定系数为0.993,表明预测输出和实测输出具有很高的相关性。由此可见,神经元数目为6 的BP 神经网络模型可满足高湿多尘综合环境下探测误差的预测与分析,其中相对湿度适用范围为50.0%~95.0%,粉尘质量浓度的适用范围为10.0~220.0 mg/m3。
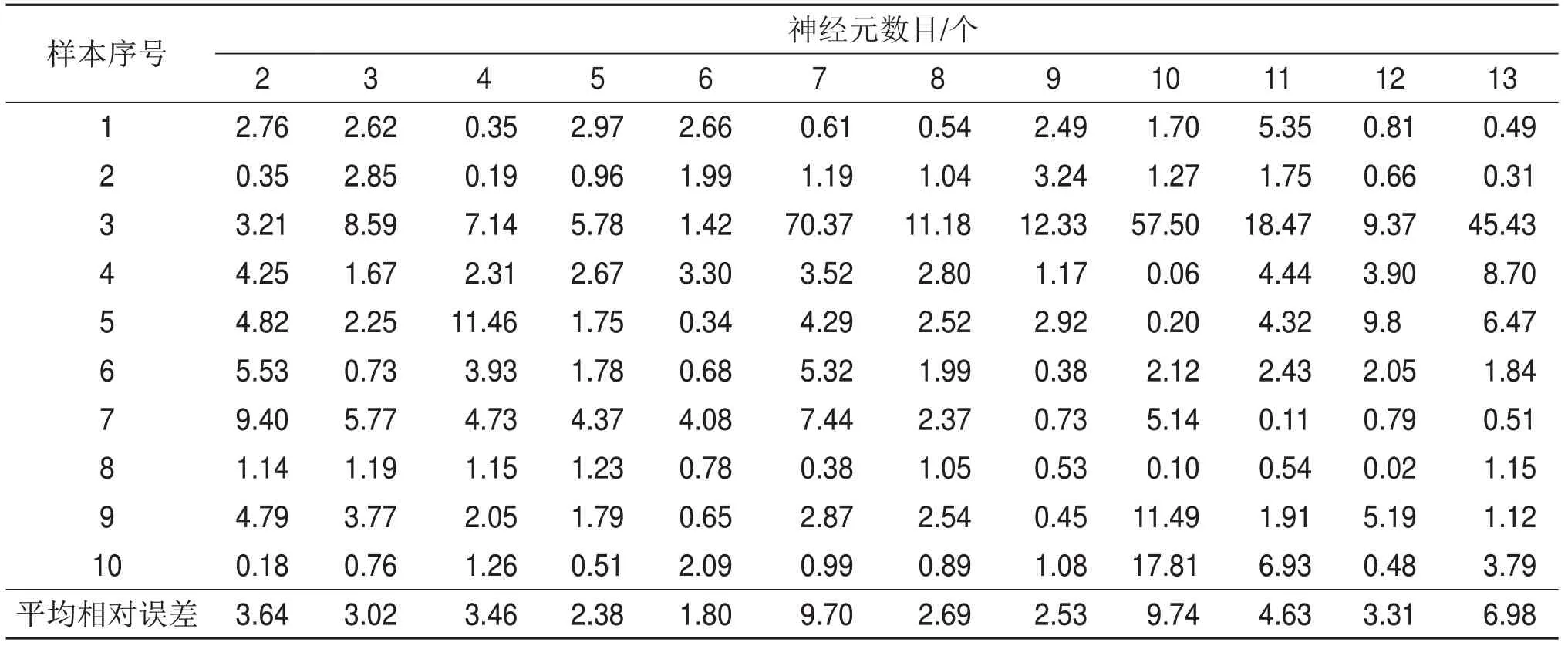
表4 不同神经元数目下BP神经网络模型预测精度Table 4 Prediction accuracy of BP neural network model with different number of neurons Er/%
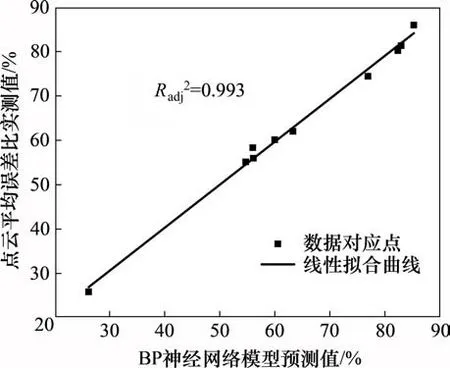
图5 点云平均误差比实测值与预测值拟合曲线Fig.5 Fitting curve between measured and predicted values
4 工程应用
某铅锌矿采用垂直深孔阶段矿房法回采,空区内部残留大量存窿矿石。为治理空区和进一步回收存窿矿石,对空区形态进行了三维激光精准探测。探测区域的粉尘质量浓度和相对湿度的均值分别为16.13 mg/m3和75.5%,进行归一化处理后分别为0.191 和0.633。通过所建立的BP 神经网络模型进行点云平均误差比预测,预测结果为4.68%,并以此进行探测数据误差修正,修正前后封装模型对比结果如图6所示。
为了进一步检验BP 神经网络模型预测精度,对探测空区进行通风降湿除尘。当相对湿度和粉尘质量浓度达到允许误差范围后,对空区进行三维激光探测,空区边界参数对比如表5所示。
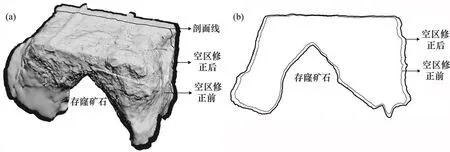
图6 探测空区修正前后封装模型对比Fig.6 Comparison diagram of model before and after modification for goaf

表5 探测空区参数对比Table 5 Parameters comparison of goaf
由表5可知,误差修正后,探测空区模型顶板标高上升0.82 m,底板标高下降1.67 m,暴露面积扩大78.08 m2,空区体积增加2 863.97 m3。对比修正后的空区模型和降湿除尘后的探测模型发现二者几乎一致。由此可见,本文所建立的BP神经网络模型的预测精度可满足实际工程应用需要。
5 结论
1)针对温度、相对湿度和粉尘质量浓度,开展采空区三维激光探测数据误差分析与修正正交试验。各影响因素的敏感性从大到小依次为相对湿度、粉尘质量浓度、温度。
2)随相对湿度升高,点云平均误差比呈“S”型趋势增长,当相对湿度介于75.0%~85.0%时,增长速率明显加快;随粉尘质量浓度增大,点云平均误差比以40 mg/m3和100 mg/m3为节点呈三段式线性增长,当粉尘质量浓度介于40~100 mg/m3时,增长速率最快,粉尘质量浓度大于100 mg/m3时,增长速率次之,粉尘质量浓度小于40 mg/m3时,增长速率最低。
3)以64 组正交试验结果为数据样本,建立神经元数目为6 的BP 神经网络模型。预测输出和实测输出的平均相对误差为1.80%,校正决定系数为0.993,可满足高湿多尘综合环境下探测误差的预测与分析。
4)应用建立的BP神经网络预测模型对某铅锌矿采空区三维激光探测数据进行误差修正,修正后的采空区顶底板标高、体积和暴露面积更符合实际情况,可满足实际工程应用需要。
猜你喜欢
河北地质(2022年2期)2022-08-22
劳动保护(2022年1期)2022-03-09
露天采矿技术(2022年1期)2022-02-20
防爆电机(2021年6期)2022-01-17
资源信息与工程(2021年5期)2022-01-15
新疆钢铁(2021年1期)2021-10-14
中国金属通报(2021年14期)2021-07-21
中国金属通报(2021年2期)2021-05-23
昆钢科技(2020年5期)2021-01-04
湖南大学学报·自然科学版(2020年4期)2020-05-06