基于三目标点的陀螺全站仪精度测试方法研究*
2020-05-17 06:14杜志刚姜留涛魏理想
矿山测量 2020年2期
杜志刚,姜留涛,周 阳,魏理想
(1.中铁隧道局集团有限公司,广东 广州 511458;2.陕西铁路工程职业技术学院,陕西 渭南 714000;3.广州南沙南国测绘有限公司,广东 广州 511458)
陀螺全站仪是一种将陀螺仪与全站仪结合为一体的用于方位测量的定向仪器,它利用陀螺仪的定轴性和进动性[1],在地球自转的作用下,获得测站点到任意目标的真北方位角。陀螺全站仪定向精度是定向观测值离散度和偏离真值的程度[2],通常采用一次定向标准偏差和一次定向中误差来衡量。目前,张冠军[3]设计了一体化检定装置,实现了陀螺仪与经纬仪一站式检定,提出了室内圆周检定法;魏纯[4]等利用天文测量获得的高精度天文方位角,设计一种陀螺经纬仪测量装置,可以测量一次定向中误差和仪器常数;彭友志[5]等提出以场地条件类似的比长基线场代替天文大地点进行陀螺经纬仪校准。以上这些研究对检定、测试与评定陀螺全站仪精度均具有指导和促进意义,适用于计量和检定机构,普通用户往往没有高精度真北方位基准、专业检定装置和专门场所,无法采用以上方法进行精度测试,因此探索一种实用性强、可操作性好、适合普通用户使用的精度测试方法和评定方法具有重要意义。
1 基于三目标点的精度测试方法
基于三目标点的陀螺观测值和角度观测值,以角度观测值为标准值,以陀螺定向观测值和角度观测值之差为研究对象,对陀螺全站仪定向精度进行测试和评定。见图1,陀螺全站仪架设在中间位置P点,仅整平不对中,目标点A、B、C分布在周围不同方向,分别架设棱镜,P点与A、B、C点通视,相邻点A、B、C夹角分别为β1、β2、β3。基于P点与A、B、C点的几何关系,利用β1、β2、β3之和理论上为360°的特性,采用真误差计算公式对陀螺全站仪进行精度评定[6]。
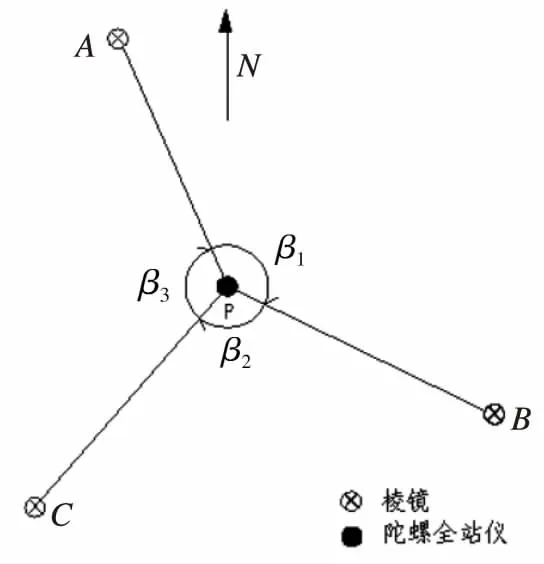
图1 陀螺全站仪精度测试方法
2 观测方法与计算模型
2.1 陀螺定向观测
见图1,将陀螺全站仪安置在中间任意位置P点,目标点A、B、C分别架设棱镜,整平即可。陀螺全站仪先后独立对目标点A、B、C进行定向观测,测得陀螺方位角分别为αA、αB、αC,则相邻点各夹角见式(1)。
(1)
式中,β1、β2、β3为相邻目标点A、B、C夹角。
2.2 角度观测
保持陀螺全站仪和三个目标棱镜点不动,检查全站仪电子气泡并确认居中,采用全站仪测角功能对目标点A、B、C进行角度观测。见图1,以A点为后视点,角度观测值为βA,测得目标点B和C角度值分别为βB、βC,则相邻点各夹角见式(2)。
(2)
式中,β1、β2、β3为相邻目标点A、B、C之间夹角。
2.3 计算模型
(3)
式中,Δ1、Δ2、Δ3为相邻目标点角度差之差。
基于设站点与目标点的几何网形特性,相邻点各夹角之和为360°,见式(4)、式(5)。在仪器、人员和外界环境一定的情况,符合真误差的特性,陀螺定向观测值和角度观测值之差平方和的平方根即为陀螺全站仪观测中误差[8],见式(6)。
β1+β2+β3=360°
(4)
(5)
(6)
式中,m为陀螺全站仪观测中误差。
3 测试案例
3.1 外业观测
成兰铁路CLZQ-9标平安隧道陀螺测量定向前,在隧道进口生活区对陀螺全站仪进行精度测试。陀螺仪型号为BJT-3,标称定向精度±3.6″,配套全站仪为徕卡TS15,标称测角精度±1″,测距精度±(1 mm+1.5 ppm)。A、B、C目标点均架设棱镜,中部任意位置架设仪器,设站点与三个目标点间距约120 m。先后对三个目标点进行6测回陀螺定向和角度测量,观测数据见表1、表2。
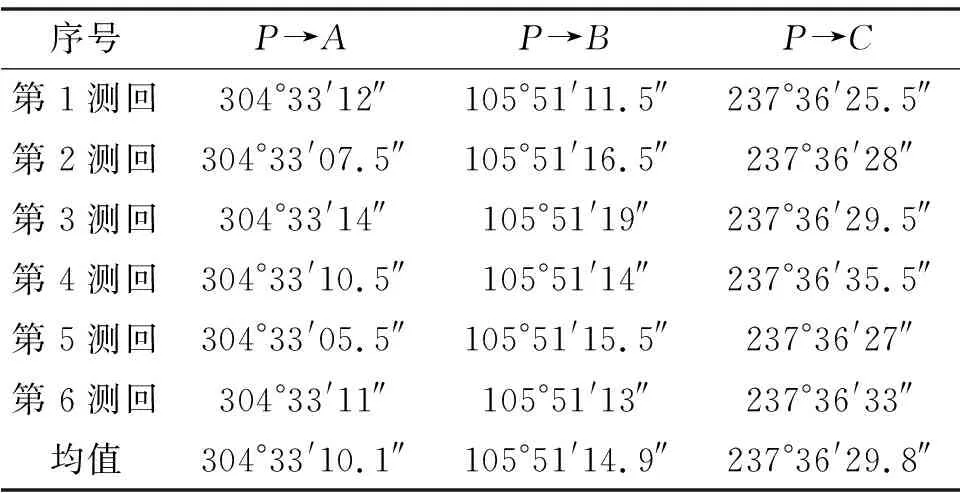
表1 陀螺定向观测方位角
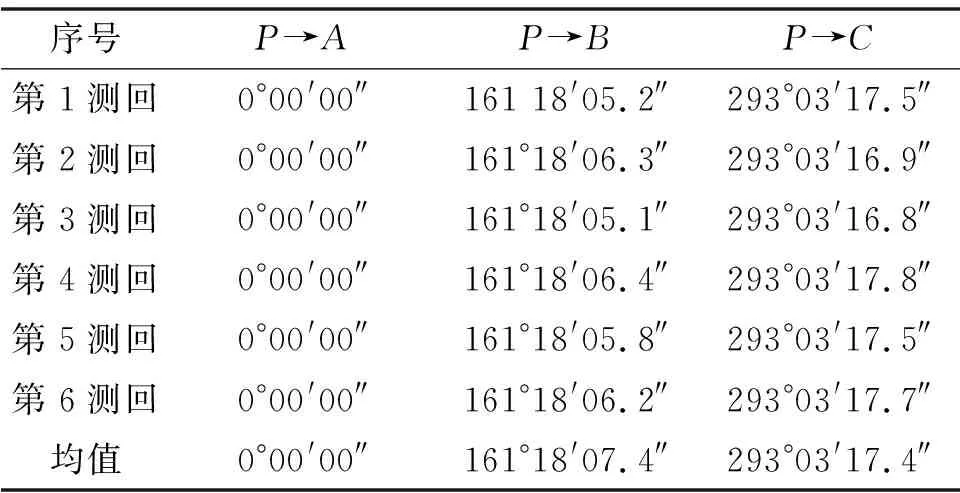
表2 角度观测值
3.2 精度计算

表3 相邻点夹角
4 对比分析
4.1 与国内规范对比分析
《陀螺经纬仪校准规范》(JJF1350-2012)中陀螺仪精度评定方法[1]:将仪器安装在工作台上,精确整平,使陀螺全站仪望远镜视准轴与方位目标精确瞄准或准直,进行寻北观测,获得方位角测量值A1,此为1次测量,按照上述操作至少进行6次独立测量,分别得到方位角值Ai,采用式(7)计算寻北重复性误差。
(7)

以案例中采集的原始观测数据为例,对三个目标点分别计算陀螺全站仪精度,可得mA=±3.1″,mB=±2.7″,mC=±3.8″,与陀螺全站仪标称精度±3.6″相比,具有差异性。相邻点测试精度指标较差分别为-0.4″、1.1″、-0.7″,最大较差1.1″,见图2,可知对单一目标进行多次观测评定精度具有随机性和偶然性,不能客观、全面体现陀螺全站仪观测精度。
4.2 与德国标准对比分析
德国标准DIN-18723中陀螺定向精度评定方法为[9]:先在已知目标方向的情况下,多次观测求出指北偏差量,作为一个常识改正值;然后对这条边的两个端点分别进行5次观测,算出测量均值进行精度评定,然后按照95%的置信区间检定测试结果是否合格。
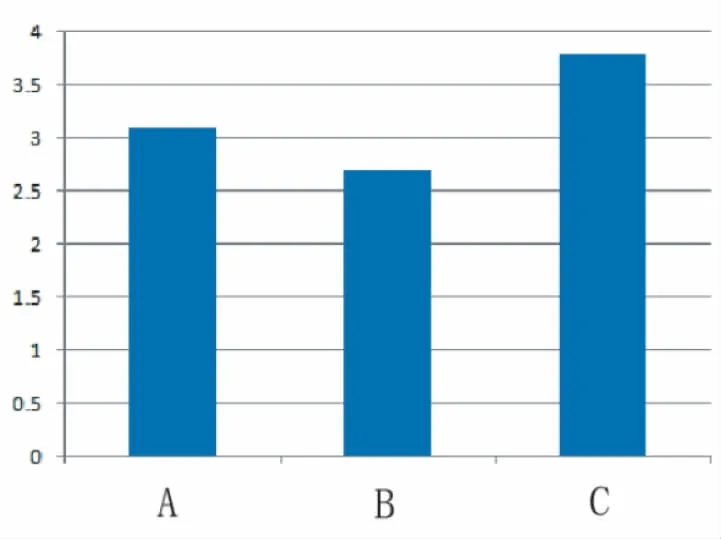
图2 A、B、C三目标点测试精度柱状图
文献[10]中采用全站仪将周围控制网中方位角传递基线场,本案例中传递后P→A坐标方位角为304°31′27.5″,依据原陀螺方位值304°33′10.1″,计算仪器常数为-102.6″。陀螺全站仪分别在P点、A点进行5次观测,观测数据见表4。陀螺全站仪测试精度m=±3.4″,加入仪器常数对陀螺定向值进行修正,P→A坐标方位角为304°31′29.8″,与原坐标方位角较差2.3″,满足要求。
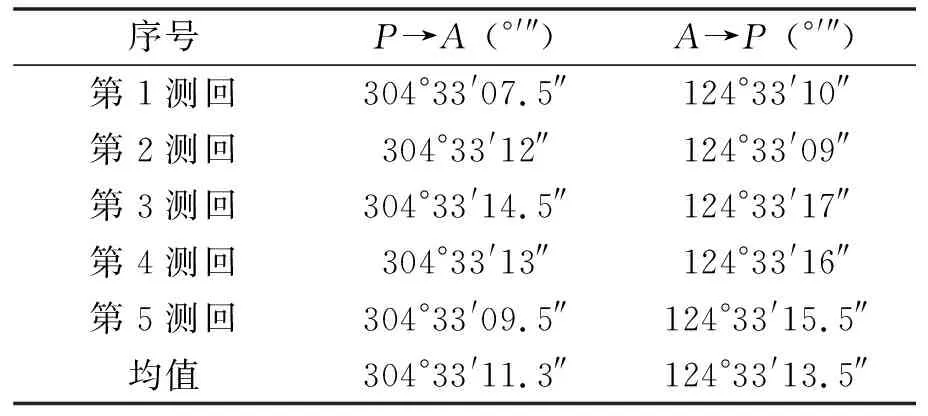
表4 陀螺定向观测方位角
5 结 论
陀螺全站仪是一种精密仪器,在日常使用前或运输后需要进行检查与性能测试,以便及时发现问题,避免带病作业。基于三目标点的精度测试方法可对多类型、多型号陀螺全站仪进行测试,对普通用户具有参考意义,现总结如下:(1)基于三目标点的精度测试方法以陀螺定向观测值和角度观测值之差为研究对象,其平方和的平方根能充分体现观测误差的离散度。隧道、矿山等地下工程利用地面与地下陀螺观测方位角之差传递坐标方位角,两者均侧重陀螺定向观测之差的离散度;(2)基于三目标点的精度测试方法仅整平不对中,消除了仪器和棱镜对中误差对测试精度的影响,具有可操作性好、实用性强、观测目标多、检核条件多、经济成本低等优点;(3)基于三目标点的精度测试方法不能测试仪器常数和偏离真值程度,建议有条件用户建立高精度真北方位基准,可进一步测试仪器常数和一次定向标准偏差。
猜你喜欢
新型工业化(2022年5期)2022-06-17
汽车工程师(2021年11期)2021-12-21
建材发展导向(2021年6期)2021-06-09
电子制作(2019年16期)2019-09-27
电子制作(2019年15期)2019-08-27
商情(2017年38期)2017-11-28
居业(2017年5期)2017-07-24
中学生数理化·七年级数学人教版(2017年1期)2017-03-25
现代职业教育·中职中专(2016年4期)2016-10-21
科技创新与应用(2016年9期)2016-05-14