齿轮箱故障预测模型设计与研究
2020-05-16 03:02:08李泽彬张进思鲍惠芳
皖西学院学报 2020年2期
黄 雷,李泽彬,张进思,鲍惠芳
(皖西学院 机器人创客实验室,安徽 六安 237012)
齿轮箱是一种减速传动机构设备[1],因而也称为减速器、齿轮减速箱,其通常包含有齿轮、滚动轴承、轴等零部件。它的运行状况对整机或机组的正常运行有直接影响,随着运行时间和环境的变化,断齿故障、轴承内圈故障、和保持架故障等会经常发生[2]。齿轮箱状态监测与故障诊断属于设备状态监测与故障诊断的重要组成部,因而,齿轮箱故障的诊断预测对设备正常运行和经济生产具有重要意义,已成为该领域当前研究的热点。考虑齿轮箱振动系统是一个复杂度很高的非线性系统,对其直接构建完整的非线性模型来预测故障非常困难[3-4]。为此,相关专家学者结合常见故障诊断方法提出了齿轮箱一系列新的故障诊断方法,丁康提出采用基于建档案的两时域三频域的诊断方法对齿轮箱进行故障诊断[5];王富民对地铁齿轮箱箱体进行了实验模态分析与有限元模态分析,得出不同频率作用下箱体结构抗震性能[6];冯志鹏基于经验模式分解的频率解调分析方法,得到太阳轮、行星轮和齿圈故障振动信号的瞬时频率、Fourier频谱的频率结构特点,分析诊断出了的局部损伤故障[7];季忠利用提升小波提取出齿轮箱故障特征信号,为故障诊断做了准备等等[8]。这些方法在故障诊断时都没有直接建立齿轮箱故障特征与故障的关系。由于神经网络能够准确地反映出各影响因素与设备运行状态之间的非线性关系,且能够同时对多个变量、多个步骤进行预测,所以杨树莲、高晓清、刘景艳等专家学者开始尝试利用神经网络来进行非线性建模[9-11],虽然都取得较好的结果,但是都会出现的全局搜索能力差、易陷入局部极小值等问题,导致预测精度不够。为了防止网络故障预测模型陷入局部极小值,本文采用具有全局搜索最优特征的遗传算法优化BP神经网络,探究设计齿轮箱故障预测模型,提高预测精度。
1 齿轮箱故障特征参数与处理
齿轮箱运行状态直接影响到传动设备能否正常工作,齿轮箱失效的形式和情况有很多,如齿轮失效、轴和轴系失效、箱体共振和轴承疲劳脱落和点蚀等,据资料统计,内零部件失效情况中齿轮和滚动轴承的故障占80%左右[12]。发生故障的齿轮箱的时频域信号和正常的信号有差异,因此可以通过这些特征信息的差异对其进行区分和诊断。为此,首先需要提取齿轮箱故障时频域信号的特征,文献[13]中以JZQ250型齿轮箱为研究对象,采用加速度传感器固定在齿轮箱特定位置来采集时频域信号,从时频域信号特征关联性角度综合考虑选取了均值、偏度、裕度指标、峭度指标、偏态指标、功率谱重心指标、功率谱方差、相关因子、谐波因子、谱原点距为特征参数,为了便于BP神经网络处理,将得到的原始特征参数按照式(1)进行[0,1]的归一化处理,处理结果如表1所示。
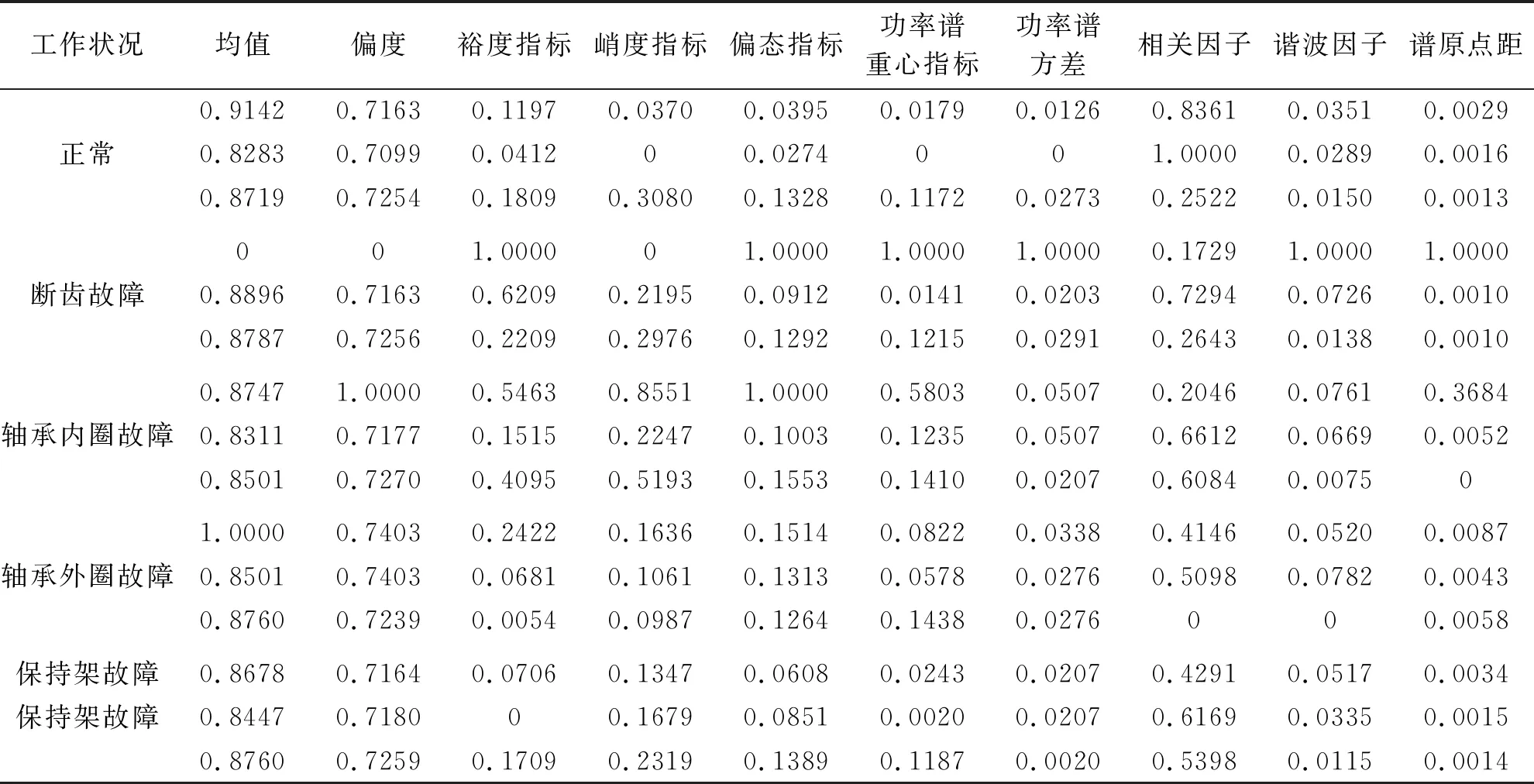
表1 齿轮箱归一化特征向量
(1)
式(1)中Xn为归一化输入向量,Xr为原始输入向量,Xrmax和Xrmin为原始输入向量的最大值和最小值,Xh和Xl设置为1和0。
2 齿轮箱故障诊断算法
2.1 BP神经网络算法
ANN (artificial neural network,简称人工神经网络)是一种功能强大的函数逼近工具,具有解决复杂非线性问题的潜力。神经网络被表示为完全相互连接的元素(节点),即所谓的神经元,用于计算学习输入和输出信号之间的关系。每个神经元都由权重和偏置分量组成。每个神经元接收不同的输入信号,并根据内部加权系统产生单一的输出信号。随后,这个信号被作为输入信号反馈给另一个神经元。在输入层中神经元的数目等于输入参数的数目;同样地,输出神经元的数目等于输出参数的数目。在输入层和输出层之间有隐含层,其神经元的数目取决于问题的大小和复杂性。信息从输入节点向输出节点正方向流动,而后将输出信号与实际值进行比较,将误差通过网络反馈回来。在连续重复误差减少过程后,网络收敛到一个小的误差值。
本文提出了BP神经网络算法是一种按误差逆传播算法训练的多层前馈网络,该算法的应用较为广泛,据统计,采用BP网络或者它的变化形式约占神经网络模型80%~90%[10]。其中激励函数、隐含层神经元的最佳个数、训练函数和学习函数是构建多层感知器神经网络非常重要的环节,BP神经网络的一般结构如图1所示。
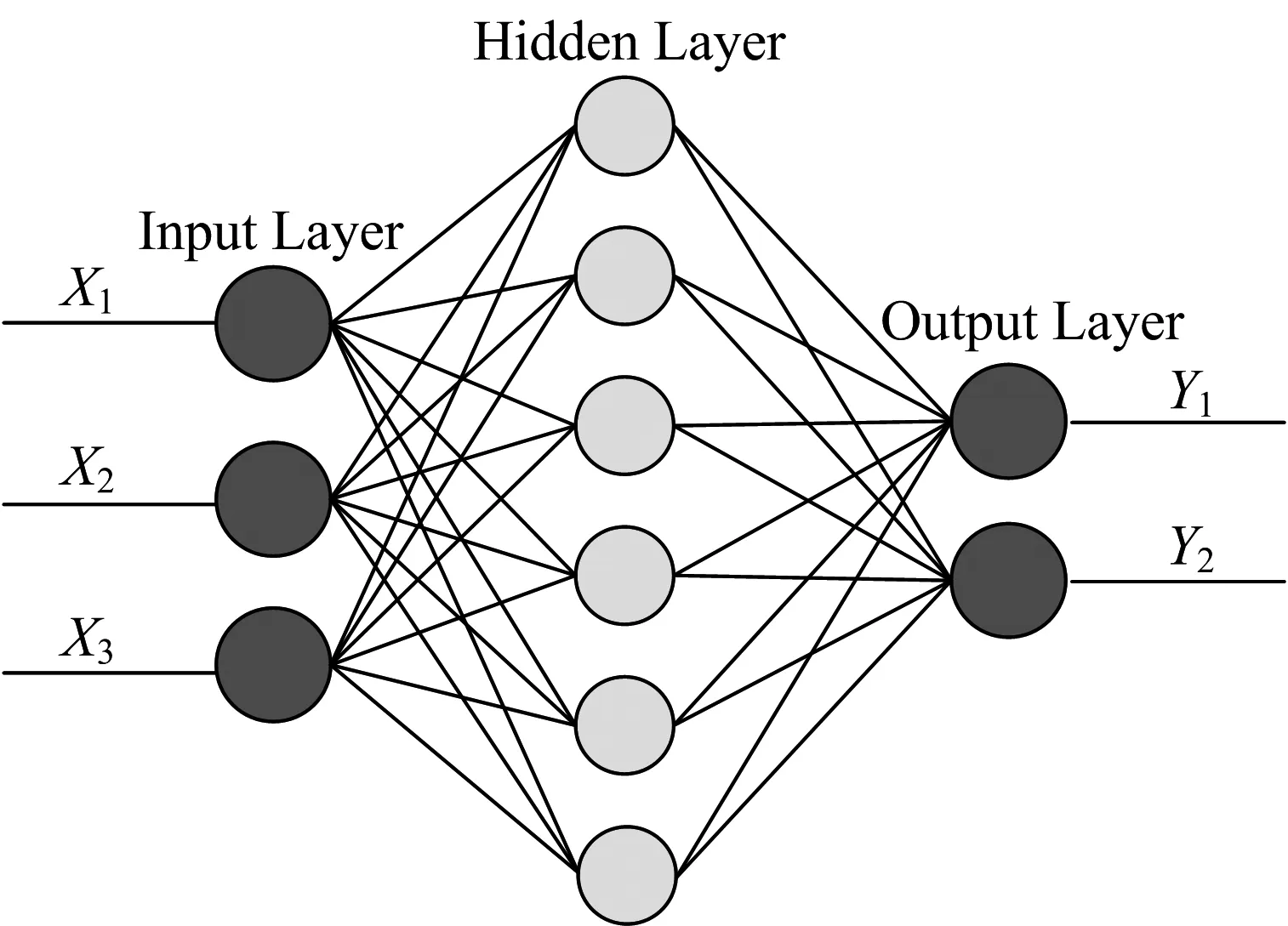
图1 Bp神经网络一般结构
2.2 遗传算法
遗传算法是模拟生物群体的遗传和长期进化过程建立起来的一类搜索和优化算法,它模拟了生物界“生存竞争,优胜劣汰,适者生存”的机制,用逐次迭代法搜索来寻优的[14]。按照一定的适应度函数(如均方误差)及一系列遗传操作(选择、交叉、变异)对各个体进行筛选,从而使适应度值高的个体被保留下来,组成新的群体,新组成的群体中各个体适应度不断增大,直到满足一定条件,最终群体中得到适应度值最高的个体即为待优化参数的最优解[15]。
遗传算法中至关重要的是确定群体规模N、交叉概率Pc、变异概率Pm、最大遗传代数等参数,其具体流程如图2所示。由图2可以得出遗传算法的步骤:

图2 GA算法流程图
1)准备、初始化,编码,设定相关参数和适应度函数。
2)产生规模为N种群。
3)用轮盘赌策略确定个体的适应度,依据适应度选择再生个体,适应度高的个体被选中的概率高,适应度低的个体被淘汰。
4)按照一定的方法进行遗传操作(交叉、变异),生成子代,形成新的种群。
5)判断是否满足条件,否返回步骤2,直到得最优解。
6)根据最优解解码,改善或解决实际问题。
2.3 遗传算法优化BP神经网络算法
典型的BP神经网络算法的问题是收敛速度慢且不能保证收敛到全局极小值处。因此,建议将人工神经网络的全局搜索潜力与遗传算法空间搜索的局部优势相结合,以提高人工神经网络的预测能力[16]。遗传算法优化BP神经网络算法流程,如图3所示,其算法的关键是将BP神经网络的样本数据的均方误差作为遗传算法的适应度函数值,并对其进行优化,得到最优的均方误差结果。接着根据遗传算法优化结果得到的权值和阈值重新回代到BP神经网络中,得到新的性能更好的训练网络,最后根据训练网络模型进行齿轮箱估值预测。
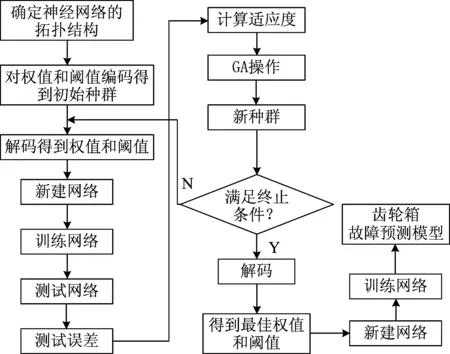
图3 GA优化BP神经网络算法流程图
3 预测模型设计与故障诊断仿真
3.1 遗传算法优化BP神经网络预测模型设计
为预测模型达到优化的目的,遗传算法采用参数分别为:种群规模N为40,代沟GGap为0.85,交叉概率Pc为0.7,变异概率Pm为0.01,最大遗传代数为50,种群中个体选择长度为10的二进制编码。针对表1中故障特征向量有10个,每10个特征对应一种齿轮箱工作情况,为了构建网络预测模型实现输入和输出的映射关系,本文将遗传算法优化的BP神经网络设置为3层,输入层神经元个数为10,输出层神经元个数为5(输出理想模式为0~1),具体样本理想输出情况如表2所示。BP神经网络的一般参数设置:隐含层激励函数为tansig,训练次数为1000次,训练目标为0.01,学习速率为0.1;影响网络输出能力的重要参数有隐含层层数、输出激励函数、训练函数、学习函数等,这里分别对以下情况进行相关计算,其中输出激励函数有logsig和purelin两种情况,训练函数有trainlm、trainrp和traingdx三种情况,学习函数有learndm和learngd两种情况,其具体计算结果如图4所示。
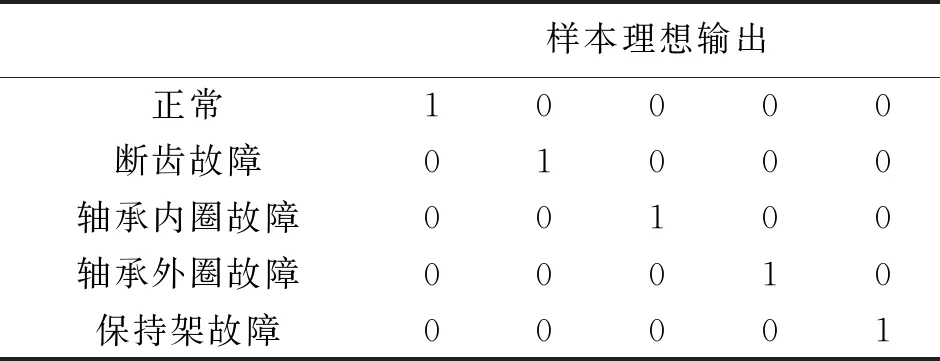
表2 BP神经网络的理想输出
为了测试需要,将每组故障特征向量的前两个选为训练数据共计10组,每组故障特征向量的最后一个选为测试数据共计5组。预测模型的效果必须通过输出参数来进行评估,本文神经网络的初始权值和神经元的偏差阈值是通过遗传算法搜寻均方误差最小得到,因而评估均方误差就是关键点。由图4可见

图4 不同模型参数情况下均方误差
不同情况下均方误差随隐含层神经元数量增加而变化,大部分随着隐含层神经元数量的增加,均方误差变化有减小的趋势,但神经元数量超过25以后,均方误差会出现不同程度的波动。隐含层神经元数目越多,预测能力越强,但需要注意的是,神经元数目的过度增加会导致过拟合缺陷,降低了模型的预测能力。结合图4的均方误差结果,输出激励函数选择线性函数purelin;训练函数选择trainlm(Levenberge Marquardt)来全局调整权值和阈值,使整体均方误差的最小;学习函数选择larndm来局部调整权值和阈值,使单个神经元误差的最小;隐含层神经元数目设置为10个较为合适,这也符合经验公式(2)设置要求,利用这些关键参数搭建的网络模型均方误差最为理想达到0.0338。
(2)
式(2)中的m是隐含层神经元数目,n是输入层神经元个数,a是1~10之间的常数。
3.2 故障诊断仿真
BP神经网络的测试样本输出结果如表3所示,利用上述参数搭建的遗传算法优化BP神经网络模型预测测试数据的均方误差为0.044619,没有优化的BP神经网络模型预测测试数据的均方误差为0.27312。由此可以看出,本文设计的优化模型能够以最快的速度收敛,提高了搜索效率,使模型避免陷入局部极小点,达到了实际预测的要求。

表3 BP神经网络的测试样本输出结果
4 结论
本文分析了遗传算法和BP神经网络算法的优缺点,阐释了遗传算法优化的BP神经网络的优势,即可以促进收敛速度、收敛到全局极小值处。结合实际情况给出了算法的各种参数,设计出神经网络结构为10-10-5,隐含层激励函数、输出激励函数、训练函数、学习函数分别为tansig、purelin、trainlm、learndm的遗传算法优化BP神经网络预测模型。利用该预测模型使得训练网络均方误差达到了0.0338的理想效果。进行测试数据预测时,没有优化的神经网络模型预测的均方误差结果为0.27312,优化模型预测的均方误差结果为0.044619,可以看出优化模型比没有优化的神经网络模型具有很高的预测精度,达到了实际齿轮箱工作故障预测的要求,说明优化模型能够进一步改善了BP神经网络的各项性能,可以为实际的齿轮箱工作故障的预测提供依据。
猜你喜欢
黑龙江大学自然科学学报(2022年4期)2022-11-17 08:07:30
山东冶金(2022年3期)2022-07-19 03:24:36
今日中国·法文版(2020年7期)2020-07-04 02:53:48
石油地球物理勘探(2017年2期)2017-11-23 06:02:04
制造技术与机床(2017年4期)2017-06-22 11:17:44
中央民族大学学报(自然科学版)(2017年1期)2017-06-11 07:13:32
统计与决策(2017年2期)2017-03-20 15:25:24
风能(2016年12期)2016-02-25 08:45:56
智能系统学报(2015年4期)2015-12-27 09:38:39
电力建设(2015年2期)2015-07-12 14:15:59