
小天体采样探测技术发展现状及展望
2020-05-14 23:59于登云张兴旺张明殷参赖小明赵曾
航天器工程 2020年2期
于登云 张兴旺 张明 殷参 赖小明 赵曾
(1 中国航天科技集团有限公司,北京 100048)(2 北京卫星制造厂有限公司,北京 100094)
开展深空探测活动是人类探索宇宙奥秘、寻求长久发展的必然途径,是近地空间到更广阔太阳系空间的必然拓展[1]。目前,我国深空探测正由月球挺进更深远的宇宙,未来深空探测工程主要以火星和小行星探测为代表。而在月球、火星、小行星乃至未来其他星体的深空探测任务中,星体表面或表面下土壤及岩石样品的采集对研究星体环境、资源、地质构造及物质组成等具有重要意义[2]。
太阳系内的小天体是比行星小但又不属于矮行星的天体统称,主要包括小行星、彗星及流星体等。获取小天体上物质主要是为了科学研究和资源获取[3]。小天体由于演化程度小,较大程度地保留了早期形成和演化的特征,是人类研究太阳系及其行星和生命的起源及演化等重大科学问题的重要载体[4]。同时,初步探测表明,小天体可能蕴藏着丰富的贵重金属和稀有元素等矿产资源,具有巨大的潜在价值。因此,小天体采样探测及其技术研究具有重要的科学与工程意义。与其他天体探测一样,小天体探测也是一项多学科交叉、技术高度集成的系统工程,其采样探测技术的突破有助于更加深入地研究地外天体特性,进而推动基础领域及前沿领域的科技进步。
本文总结了小天体探测40余年中采样探测技术的发展历程,分析了现有采样探测技术的种类、特点和适用性,提出了采样探测技术未来可能的发展趋势和研究重点,可为后续我国小天体探测提供参考。
1 小天体采样探测发展
与其他地外天体探测相比,小天体探测起步较晚。20世纪80年代,哈雷彗星的到来使得各主要航天国家开始关注小天体探测。经过近40年的发展,小天体探测已实现飞越、环绕、撞击、着陆及采样返回多种探测方式,探测程度和目标进一步加深[5]。截至目前,全球共直接或间接实施了22次小天体探测活动[6],不同探测方式统计如图1所示。其中,飞越探测有2次失败,着陆任务中有2次为环绕+着陆探测,采样返回任务中有2次任务仍在进行中。
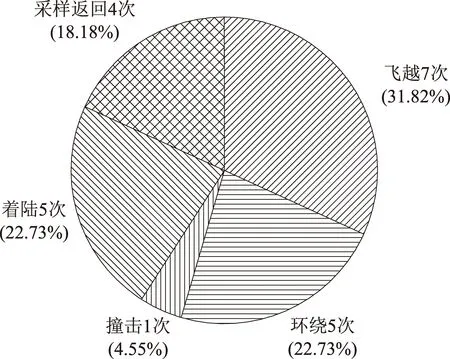
图1 不同探测方式统计Fig.1 Statistics of different exploration modes
在22次探测活动中,5次为采样探测任务。其中:“罗塞塔-菲莱”(Rosetta-Philae)探测器为着陆就位采样探测任务,并未返回;“星尘”(Stardust)、“隼鸟”(Hayabusa)、隼鸟-2(Hayabusa-2)及“源光谱释义资源安全风化层辨认探测器”(OSIRIS-Rex,简称“欧西里斯”)等探测器为采样返回探测任务。此外,马可波罗-R(MarcoPolo-R)采样返回和“彗核采样返回”(Fresh From the Fridge,Triple F)探测任务正在积极筹备中。7次采样探测任务如图2所示。
上述任务涉及的采样探测技术主要包括飞越吸附、射弹溅射、锚固钻取、气体激励、轮刷+岩凿器,以及取芯管冲击贯入等,其技术特点及适用性如表1所示。

表1 小天体采样探测技术特点及适用性
2 小天体采样探测技术进展
小天体特性较为复杂,具有微弱引力、形状不规则、环境因素和表面构造及其成分特性不确定等特点。因此,实现小天体采样探测,除满足采样收集过程不能改变物质组成(分子、元素或同位素)、物理性质、矿物及其相的比例和粒度分布等约束,还必须使采样探测技术满足低反作用力、环境适应性及不同表面适应性等工程约束要求,同时还需要考虑可重复取样及样品污染防护等要求,如图3所示。
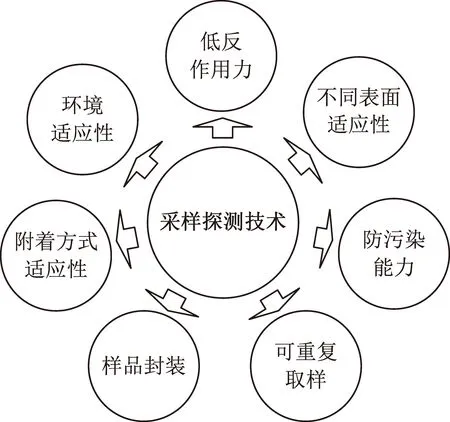
图3 采样探测技术特点
目前,综合国内外研究现状,小天体采样探测技术主要可概括为吸附捕获、射弹溅射、螺旋钻进、切割、轮刷、撞击取芯、气动、铲挖,以及冲击和振动钻进采样技术[7-8]。其主要技术特点和适用性分述如下。
2.1 吸附捕获采样技术
吸附捕获采样技术根据采样方式的不同,主要分为飞越吸附捕获采样技术和接触吸附捕获采样技术2类。
飞越吸附捕获技术是探测器以一定速度飞越小天体,通过多孔的固体凝胶吸附捕获星际或小天体周围的尘埃及挥发物等微小颗粒。其主要以美国的“星尘”探测器为代表,利用具有低密度、惰性、低热导率、高透明度及多孔等特性的硅基固体材料气凝胶作为主要捕获介质进行吸附捕获[9]。其中,高透明度使得捕获颗粒的轨迹定位和测量相对容易。气凝胶呈小块状(面积2 cm×4 cm,厚3 cm),共132块,通过柔软的铝箔片(Al 1100)固定在网球拍状的金属框架中[10]。其每个气凝胶模块采用变密度设计,密度从正面的5 kg/m3一直变化到背面的50 kg/m3。颗粒撞击气凝胶后将被捕获在材料内,形成相应的轨迹,实现对空间挥发物及星际尘埃的捕获收集。最后,气凝胶固定装置被收回,密封在主航天器末端的返回舱中带回地球。
接触吸附捕获采样技术是采用与小天体接触的方式,利用胶粘剂等粘取吸附小天体表层细小颗粒。文献[11]中研究的接触即走吸附采样机构,包括一个机械臂和一个直径30 cm的具有胶粘剂的托盘。当采样器到达小天体表面上方一定高度后,机械臂展开使其末端的胶粘剂托盘接触小天体表面,在1~2 s内完成小天体表层颗粒的胶粘吸附,可获取1~2 cm的碎屑。最后,机械臂收回并将粘接有样品的托盘放入返回舱带回地球。
吸附捕获技术具有简单易行、活动部件较少且耗能少等优点,尤其飞越吸附捕获技术因不考虑着陆、起飞等因素,相对更为简单,耗能更少。该采样技术主要适用于太空飘浮的尘埃及小天体表层碎屑等微小颗粒,采样所需作用力很小,采样量取决于颗粒的多少,可控性较低。为了增加太空颗粒的数量,进而提高采样量,可以采用快速撞击采样返回(RISR)技术。由距离小天体表面1~2 m高度掠飞的采样器释放单独的撞击器撞击小天体表面(如图4所示),从而使小天体上空产生大量尘埃及碎屑羽流,随后采样器在羽流中吸附捕获与其大致同速的粒子或碎屑,并将其收集在金属容器或收集袋(Kevlar或内衬Nextel制成)中,由探测器带回地球[12]。采用这种吸附捕获方式会让样品层理信息受到影响。岩石等材料将承受很大的压力,且会因冲击波的变形而被加热,从而可能造成岩石的原始特性丢失。
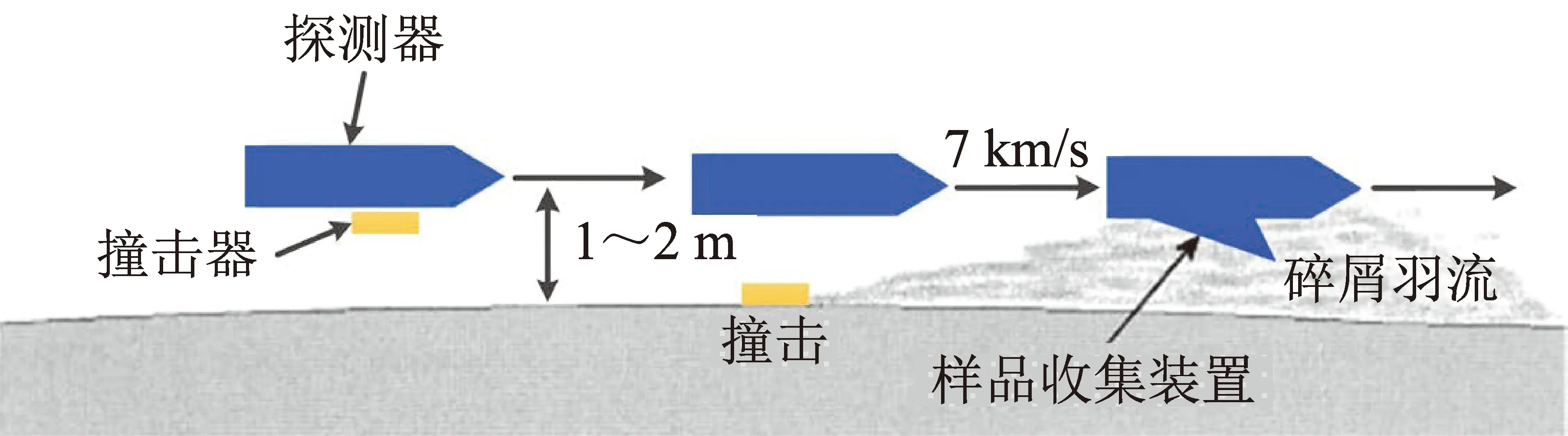
图4 快速撞击采样返回技术采样过程Fig.4 RISR technique sampling process
2.2 射弹溅射采样技术
射弹溅射采样技术是在探测器与小天体表面接触后,通过火工装置等发射射弹撞击小天体表面,使得表层土壤或大型岩块发生颗粒溅射,溅射颗粒通过一定的导流装置(如锥形罩等)进入样品容器,从而完成采样[13]。此项技术以日本的“隼鸟”系列探测器为代表,探测器主要由抛射器、锥形罩、可扩展编织罩及金属罩等组成[14],如图5所示。抛射器通过发射质量为5 g的金属钽射弹高速(300 m/s)撞击小天体表面[15],表层的岩土微颗粒在射弹撞击下以一定的速度溅射,并通过金属罩、扩展编织罩和锥形罩构成的通道进入样品罐,最后通过转移机构转移至样品容器。
射弹溅射采样技术可采用接触即走的着陆、采样及起飞返回的探测方式,不需要考虑微重力下的着陆锚固技术,采样无需电机且所需作用力较小,同时可以降低燃料消耗,技术实现相对容易。但是,这种技术主要适用于表层采样及采样量较少的探测任务,采样量取决于溅起颗粒数量,具有一定的不可控性。此外,与RISR技术类似,高速撞击对样品层理特性的保持具有一定的影响。
2.3 螺旋钻进采样技术
螺旋钻进采样技术一般是通过取芯钻头和带有螺旋的空心钻杆旋转钻进实现样品采集和转移。目前,该技术无论是在月球或火星探测上都应用广泛,相对较为成熟。在小天体探测方面,ESA的“罗塞塔”(Rosetta)任务、Honeybee Robotics公司研发的样品采集和传送机构(SATM),以及文献[16-17]中提出的一种多功能小行星采样器,都主要采用螺旋钻进采样技术。螺旋钻进采样技术的执行系统通常主要由钻进取样机构及样品转移机构等组成[18]。其中,钻进取样机构由旋转电机、取芯钻具(取芯钻头和螺旋钻杆、取样管等)、断芯机构、进给传动机构(钢丝绳或丝杠螺母等)及直线导轨等组成。钻杆一般采用强度和刚度较高的空心外螺旋结构;钻头采用镶有硬质合金片或金刚石复合片等材料的刀片,以有效切削小天体土壤或岩石等样品及钻进排屑。此外,为实现自主操作和分析,钻头还可以安装测量力和扭矩等的传感器;为了实现原位探测,在样品室内还可以设计可靠的样品弹出机构,将样品传送到原位分析仪器进行分析[19-20]。由于小天体的微重力特点,要通过螺旋钻进采样技术实现小天体采样,必须先完成采样器在小天体表面的锚固,因此还需要配备相应的锚固装置,如“罗塞塔-菲莱”主要利用冰螺栓、冷气推力器及鱼叉装置等组合实现锚固[21-22]。冰螺栓首先依靠着陆器的冲击力刺入彗星表面,冷气推力器随即喷气反推,确保冰螺栓进一步刺入彗星表面,随后火工装置驱动鱼叉装置动作,多点刺入彗星表面,完成着陆器与彗星的锚固[23]。
螺旋钻进采样技术实现了钻采一体的功能,同时可满足钻取采样返回及原位探测等不同任务。它能很好地适应小天体不同的表面构造,实现表层、次表层甚至深层等不同深度的土壤及岩石等对象的钻进采样,深入探测小天体内部结构;而且,其采样量大,并能够较好地保持采样对象的层理信息,有效避免交叉污染。该采样技术可控性强,能够集成各种传感器实时在线分析检测,通过钻进参数和规程的调整实现样品大小的连续调节(如样品采集和传送机构),从而满足原位探测各种分析仪器的要求。常规的螺旋钻进采样技术所需的钻进力大,在钻进采样前首先需要完成采样器在小天体表面的锚固和附着等,而微弱引力下的着陆及其不同表面的锚固技术相对复杂,而且着陆、锚固及起飞等的燃料消耗相对较大。
2.4 切割采样技术
切割采样技术主要是Honeybee Robotics公司为“接触即走表层采样器”(TGSS)开发的采样技术,主要由展开机构、采样头及样品容纳子系统组成[24]。展开机构通过将吊杆伸展到小天体表面进而展开采样头。采样头包含5个高速切割器(中心钻安装在齿轮侧边),由单个马达驱动,在切割器顶部装有一个可移动的样品室。采样时,采样头以5000~8000 r/min的速度与切割器反向旋转,消耗20~30 W的功率。这些高速切割器在接触小天体表面时会抛出表层材料,安装在切割器上方的2个导轨将抛出的颗粒或碎屑引导到可移动的样品室中,随后样品容纳子系统对样品进行转移并密封。
切割采样技术能够采集表面下1 cm到4 cm深的重碎石(体积最高50 cm3)或弱固结材料(单轴抗压强度(UCS)小于10 MPa)的样品,可重复使用,能对多个位置进行采样;而且,能将样品存储在单独的容器中以进行原位分析或样品返回,交叉污染小。
2.5 轮刷采样技术
轮刷采样技术是一种接触即走方式的采样技术,NASA喷气推进实验室(JPL)及ESA均对此技术开展过研究。轮刷采样机构主要由机械臂、轮刷和样品收集器等组成。轮刷采用一对具有柔性的电轮刷,这样在采样遇到比预期更坚硬的土壤时,轮刷可简单地偏斜,进而使得电动机继续转动,避免其卡住和过载[25]。当探测器降低到距离小天体表面一定高度时,机械臂展开至与小天体表面接触,随后轮刷会以相对较高的速度反向旋转,将表层样品扫入收集器。除此之外,为了能够适应一定的岩石表面,ESA在此基础上集成了一种岩凿器[26-27],以破碎一定硬度的小天体表面,增强采样技术的适应性。
轮刷采样技术采用具有足够柔性的电轮刷,可以相应地使电动机更轻并且耗电更少,降低能源消耗。同时,电轮刷的刚度、电机转矩和转速可做适应性调整,以最大程度地提高对特定预期硬度土壤的采样效率。但是,该采样技术只适用于表层比较松散的颗粒采样,而且采样收集可控性较弱。
2.6 撞击取芯采样技术
撞击取芯采样技术是利用取芯装置以一定速度撞击并插入小天体表面下一定深度,样品由取芯管收集完成后转移到样品容器并返回探测器。目前,主要有探针撞击取样、鱼叉取样及着陆取芯管撞击取样3种取样方式。
探针撞击取样技术[28]通过搭载几个探针的探测器实现。探测器到达选择好的小天体表面采样点,探针与探测器分离,利用姿态控制系统自旋稳定,并将其自身推向小天体表面。撞击后,探针收集样品并将其输送到上级收集器,随后进行密封。带有样品的收集器与探针主体的其余部分分离,并使用与下落时相同的姿态控制系统从表面起飞,与探测器对接后移交密封的样品,最终由探测器将样品带回地球。该技术的主要优点是采样系统完全独立于探测器,从而消除探测器与小天体表面接近时的相关危险,燃料消耗也相对较小。
鱼叉取样技术是探测器在距离小天体表面一定高度时通过发射带有系绳的鱼叉取样器迅速收集来自小天体的样品。高度不同,鱼叉取样器发射形式也不同。高度较高时,可直接从搭载有鱼叉取样器的探测器上投下;高度较低时,可采用压缩空气或存储的机械能或化学能来发射。鱼叉取样器被发射到小天体表面后,在穿透表面的过程中捕获、采集样品,然后使用系绳将其卷回到探测器中。如果表面非常柔软,且发射功率较高,鱼叉取样器会比预期穿透深度要深很多,这样样品取回就具有一定的挑战性。
着陆取芯管撞击取样技术采用着陆后的取芯管撞击小天体表面,从而实现样品获取。“虹神星(7 Iris)探测”(A Main Belt Asteroid Seismic study and Sample Acquisition to Determine meteorite ORigins,AMBASSADOR)任务[29]和“彗核采样返回”任务[30]均采用此项技术。取芯器是固定的圆柱形容器,固定在着陆到小天体表面的刚性臂末端。当炸药点火(或弹簧释放)将取芯器向下方发射时,芯管会埋到小天体表面里,随后通过芯管底部的阻挡机构将样品收集到芯管里。最后,利用反冲力将取芯器和样品送回着陆器返回地球(“虹神星探测”任务)或直接从小天体表面起飞返回地球(“彗核采样返回”任务)。
2.7 气动采样技术
气动采样技术在空间应用的概念早已被提出。20世纪90年代,NASA约翰逊航天中心(JSC)就提出了用于月球采矿的气动采样技术[31]。如图6所示,气动采样技术主要有2种方法:①将压缩气体从中心管注入到风化层下几厘米处,向外逸散的气体将中心管周围的土壤颗粒吹入输送管,并沿其向上运动到样品收集器;②将带有喷射气孔的自封闭管插入风化层中,管的前端由于风化层颗粒的进入形成封闭系统,然后注入气体,管内的风化层颗粒会随着气体的流动进入样品收集器。
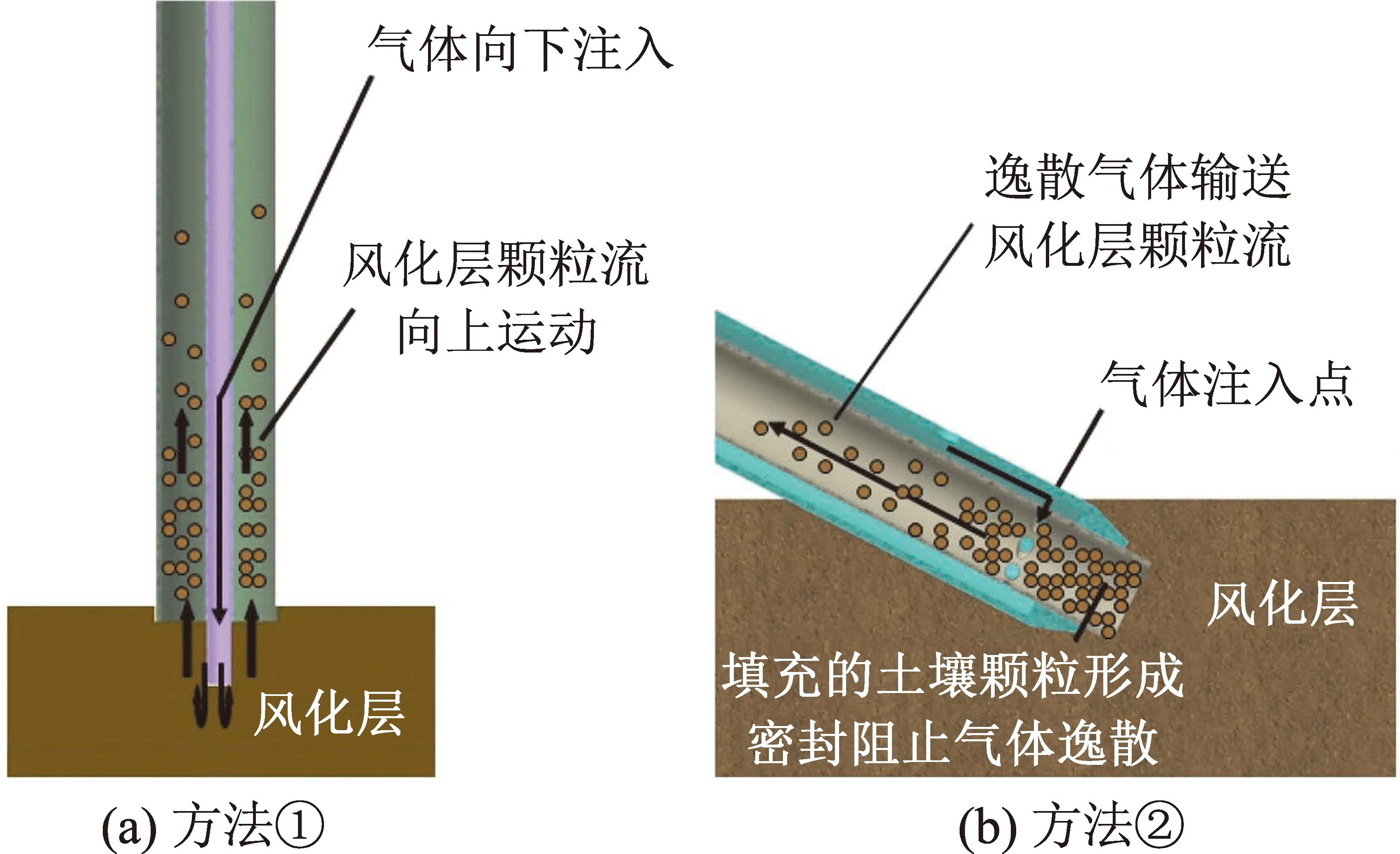
图6 2种气动采样技术示意Fig.6 Two pneumatic sampling techniques
目前,NASA的“欧西里斯”任务就采用了气动采样技术[32]。当采样器接触小天体表面后,指向表面的氮气环形射流使表层松散风化层流化[33],带有粉尘的气流通过圆形采样器内的过滤器元件,其中的气体逸散,碎石及粉尘等颗粒会被过滤器捕获,随后接触盘中的聚酯薄膜材料收集流动的表层样品。在此期间,表面接触垫还会收集细颗粒材料。采样完成后,机械臂弹簧反弹,发动机点火飞离小天体表面[34]。此外,马可波罗-R任务在轮刷和岩凿器的基础上也集成了气动收集样品技术,以更好地获得样品。我国也开展了小天体气体激励采样技术研究,在气体激励模块的基础上增加了破岩机构,提高了对小天体不同表面构造的破碎程度,增强了采样技术的适应性[35]。
气动采样技术非常适合于获取用于科学分析的小样品及用于资源开采和处理的大样品。气动采样系统一般由固定的喷嘴和一系列的管子组成,它没有诸如电动机、轴承等移动部件,因此非常适合多尘环境。同时,通过调节压力和流速,可以区分颗粒大小,从而实现针对特定任务量身定制或优化采样系统[36]。此外,如果只为采集少量样品进行科学分析,还可以将气动采样系统集成到着陆器的每个脚垫内。采样管可以固定在脚垫内,也可以在脚垫内展开,与脚垫齐平或粘在脚垫下方。但是,单一的气动采样技术只适合表层比较松散的风化层和碎石采样,为更好地适应多成分采样,需集成其他采样技术。
2.8 铲挖采样技术
铲挖采样技术是NASA肯尼迪航天中心(KSC)开发的“风化层表面高级系统操作机器人”(RASSOR)[37]采用的技术。该机器人(如图7所示)可以在极低重力的环境中运行,能够在陡峭的斜坡和较为松软的风化层地形上行走,并且具有可逆的操作模式,因此若发生倾翻也可重新恢复正常工作。其挖掘系统是一个可移动平台,该平台带有履带,可以与轮式系统配合使用。2个反向旋转的铲斗滚筒由旋转悬臂机构固定在移动平台的前端和后端,通过控制悬臂的角度可以改变铲挖切削深度。该平台具有装载、运输和卸载3种操作模式。在装载过程中,安装在铲斗滚筒外部的铲子会以20 r/min的速度依次切割多块土壤或碎石。在运输过程中,通过旋转悬臂使铲斗滚筒升高,离开挖掘表面,然后移动平台移动,过程中土壤或碎石会留在铲斗滚筒中。最后,当移动平台到达卸载位置时,铲斗滚筒会以与铲挖旋转方向相反的方向旋转,从而使收集的样品从每个连续的铲斗中排出。此外,为了从样品中回收矿石,还可以将铲斗设计为样品提取回收装置,即当捕获碎石后,将滚筒密封,随后加热筒内的碎石以回收有价值的挥发物,例如水冰。

图7 “风化层表面高级系统操作机器人”Fig.7 RASSOR (Regolith Advanced Surface Systems Operations Robot)
“风化层表面高级系统操作机器人”具有可逆操作模式,任一侧朝上都可以将自身翻转过来。因此,它可以直接从着陆器的甲板上驶下,靠低重力自行展开,不需要额外的展开机构,能降低装置复杂性,减小质量,并提高可靠性。另外,对称的反向旋转的铲斗滚筒能让2个挖掘力相互抵消,即水平作用力为零。但是,该技术主要适用于表层松散的风化层和较小碎石采样,对大块岩石或整岩的采样能力有待增强。
2.9 冲击和超声振动钻进采样技术
小天体的极低重力环境使得降低采样作用力至关重要,而冲击和振动钻进采样技术可以满足此要求[38-41]。该技术主要通过凸轮弹簧、擒纵机构、电磁、压电等方式实现,包括冲击钻进采样技术和超声振动钻进采样技术等。其中,冲击钻进采样技术是指在探测器安全着陆后利用电能等驱动,采用类冲击锤打桩原理对冲击锤进行周期性储能,利用冲击锤释放后获得的动能冲击采样器本体,以获得冲击作用力侵彻小天体岩石或土壤,通过“侵彻挤密”效应实现采样器的周期性间歇钻进,直至完成钻进取芯采样。超声振动钻进采样技术包括超声辅助钻进取芯采样技术及超声冲击钻进取芯采样技术。超声辅助钻进技术是将常规钻头或取芯钻头安装到超声波换能器中,实现在常规回转钻进行切削运动时施加高频(超声波)振动,从而实现小作用力下岩石等的钻进采样。在此基础上,超声钻进采样技术通过一定的机构传递,将超声高频振动转换成低频锤击运动[42],以实现小天体的钻进采样。
冲击和振动钻进采样技术是低功耗、强适应性的钻探技术,所需采样作用力很小,可以克服小天体采样时钻头钻进需要作用力大的局限性,能够使用相对较轻的钻进设备以较小的作用力执行硬岩、冰块和土壤的钻进取芯任务。此外,新型超声钻进采样器结构简单、体积小、质量小,方便安装在轻质灵巧的工作平台(如漫游车、机械臂)上[43],也便于航天员进行人工操作,其动力源为压电驱动,能更好地适应复杂空间环境(高低温、真空及辐射等),在探索适合深空探测的科学钻探新技术和新方法的过程中备受瞩目。
3 未来小天体采样探测关键技术
纵观小天体采样探测的发展历程和特点,小天体采样探测已进入采样返回并进行详尽研究的阶段。而探测器资源约束及小天体表面和内部构造等特性对采样返回任务的实施具有重要的影响。为更好地实现我国小行星“探、控、用”(小行星探测“三步走”[44])发展策略,进一步深入研究小天体的内部构成,探测水和有机物质的分布等,未来探测任务将逐步向难度更大的长期着陆并采样返回的方式迈进,所以长期着陆、采样量大及适应不同地质构造等的采样探测技术将是研究重点。作为对未知宇宙的探索活动,探测的小天体及其环境往往具有不确定性,固有的风险性较高,但无论采用何种技术,采样机构及其采样控制器均应尽可能地减小质量,降低功耗,优化布局[45]。因此,兼具表面适应性强、可重复性强、轻量化、能耗低及效率高等特点的采样返回技术将成为研究重点。
3.1 低反力高效碎岩技术
目前,已探明的小天体表面物质构造按类型可大致分为表面土壤、鹅卵石、巨石及陨击坑等[46]。已有采样探测器(如吸附捕获、射弹溅射及气动采样)大多以表面土壤为对象进行研究分析,为更深入研究小天体构造及成分,需要开展小天体深层物质钻进及碎岩技术研究,得到具有深层采样能力的多功能、低功耗、轻小型岩石采样机构[47]。不同于月球、火星等其他地外天体,小天体具有微弱的引力环境,因此针对月球和火星等的螺旋钻进采样技术不能完全适用于小天体采样探测,必须开展微弱引力环境下的低反力高效碎岩技术研究。为此,需要重点开展包括超声钻取碎岩技术、热辅助破岩技术、爆破碎岩技术、电磁冲击碎岩技术及激光碎岩技术等的研究和攻关。除此之外,为提高碎岩效率和任务可靠性,还需要深入开展超声、热辅助及爆破等作用下碎岩机理及其仿真和试验研究,分析影响岩石破碎程度的主要因素,充分认识不同技术在碎岩中的特性,得到适用于小天体采样探测的低反力、低功耗、高效碎岩技术。
3.2 不同表面锚固技术
除“罗塞塔-菲莱”探测器外,现有其他小天体采样探测器主要基于绕飞或接触即走的短期着陆采样方式,并未考虑着陆锚固技术。而纵观国外已规划的彗星采样返回、小行星采矿及载人登陆小行星等任务,长期着陆探测将在后续小天体探测任务中起到至关重要的作用。小天体的微弱引力环境使探测器在着陆及进行采样、原位探测等操作时,必须开展相应的锚固技术设计,以保证探测器与小天体表面具有较好的固联状态。小天体表面及其岩石硬度和脆性等的不确定性[48],使锚固困难极大且带有不确定性,所采用的锚固技术必须同时适用于各种表面[49]。因此,开展高可靠的锚固技术研究对小天体长期着陆探测及采样返回具有重要意义。锚固机构主要包括发射装置、锚和缆绳,其中,发射装置的可靠性决定了探测器能否在小天体表面进行锚固[50],锚的结构影响着锚固的可靠性。为可靠地完成锚固,需要针对风化层、碎石堆及巨石(不同硬度和脆性)等不同表面开展发射装置和锚结构等锚固技术的适应性研究,使其能够在不同小天体表面安全可靠地锚固。
3.3 复合高可靠采样探测技术
由于小天体种类繁多,地况复杂,且目前很难通过地面望远镜判定小天体类别,只能通过探测器对其进行近距离绕飞观测或对来自小天体的陨石进行研究来推测小天体表面构造或成分特性,对其地质状况的认识还十分有限。因此,采样器在着陆采样前对采样对象的具体特性并不完全了解,采样具有一定的盲目性。这就要求采样器具有很强的适应性,能够对不同特性的地质进行采样,使采样探测能力覆盖松软土壤、碎石颗粒、岩石、金属岩石及冰层等不同对象,同时还能具备样品保存、分选及处理甚至分析的能力。目前,已有采样技术主要针对土壤或碎石等一种或两种对象进行适应性研究。未来,综合有超声、微波、激光、电磁冲击、爆破、钻取、钳取及气体激励等两种或多种功能的复合采样技术将会成为小天体采样探测的主要发展方向之一。同时,还需要开展小天体表面自适应钻进规程研究,有效控制钻进力载,提高钻进效率及取样率[51]。此外,小型化多物理量耦合系统综合采样技术,也是未来小天体采样探测技术的研究重点。
3.4 微重力高真空模拟技术
利用采样收集机构获取样品并对样品进行收集、转移和分析研究,是小天体采样探测任务的关键技术。在采样探测及返回任务中,无论是样品采集技术还是样品回收技术,都需要充分考虑小天体的环境因素。相比于地面的大气和重力环境,由于小天体微弱引力和高真空环境,采样技术和样品传输及回收技术与地面重力下的行为会存在较大的差异,气流及颗粒的运动可能有所不同,这些都直接影响采样任务的成败。目前,国内外已有的采样探测技术对微重力高真空环境下的样品运动和转移研究尚有待深入。为确保采样返回任务的顺利完成,必须在地面研究小天体微重力高真空采样环境下的等效模拟技术及此环境下样品采集作用行为验证技术,深入了解微重力高真空环境下气流和颗粒的分布与运动,充分进行地面验证,提高采样任务的安全性和可靠性。
此外,采样实时探测集成技术、采样就位探测与分析及提取利用技术等,也将是后续小天体采样探测技术的研究重点。
4 结束语
小天体采样探测是研究太阳系形成与演化、探索宇宙奥秘、搜集地球安全防御信息及寻找地外稀有资源等的重要手段,已成为未来一段时间内深空探测任务的热点领域之一,同时也是一项高技术、高风险、高投入的航天活动。国外虽然结合小天体探测任务开展了不少小天体采样技术研究,甚至有的已在工程任务中得到较好的应用,但大多仍处在概念研究或初步研究阶段,可靠性更高、适应性更强的采样技术亟需攻关,以适应未来的小天体采样返回探测发展需求。
我国在小天体采样探测技术研究方面起步较晚,目前,部分高校和研究机构结合未来小天体采样探测需求开展了相关技术研究,并取得了一定进展,但与国际先进水平相比仍存在一定差距。面对目前国际小天体采样探测热潮,我国应大力开展小天体采样探测关键技术研究,提高小天体采样探测能力,为进一步推动空间技术、空间科学和空间应用等领域的创新发展和未来小天体探测活动提供支撑。
猜你喜欢
材料与冶金学报(2022年2期)2022-08-10
北京航空航天大学学报(2022年7期)2022-08-06
军事文摘(2021年22期)2022-01-18
汽车零部件(2021年12期)2021-12-29
学苑创造·A版(2020年10期)2020-11-06
太空探索(2020年10期)2020-10-22
小学科学(2020年1期)2020-02-18
百科探秘·航空航天(2020年12期)2020-01-22
百科探秘·航空航天(2019年4期)2019-06-11
小学科学(2019年12期)2019-01-06