
基于双目测距的无人机电力线路巡检安全距离测量研究
2020-05-11 11:44张静刘晓铭黄国方
微型电脑应用 2020年2期
关键词:无人机
张静 刘晓铭 黄国方
摘 要: 为了提高无人机电力线路巡检效率,在分析双目视觉测距以及双目相机标定的基础上,建立了基于双目测距的无人机电力线路巡检安全距离测量方案,并采用双目测距原理搭建试验台对建立的系统进行实拍图像的Hough直线测试。研究结果表明模拟和输电线相距15米的部位测距时,在无人机上搭载双目测距仪,通过对比发现测试距离接近实际15米,误差被控制于5%范围内。利用无人机搭载双目测距仪,控制赶超非常灵活,当无人机飞行期间受到气流干扰后云台角度将发生变化。
关键词: 双目测距; 无人机; 线路巡检; 安全距离
中图分类号: 文献标志码:
Research on Safety Distance Measurement of Unmanned Aerial Vehicle Power
Line Inspection Based on Binocular Ranging
ZHANG Jing1,2, LIU Xiaomin1,2, HUANG Guofang1,2
(1. NARI Group Corporation (State Grid Electric Power Research Institute), Nanjing 211106;
2. NARI Technology Co. Ltd., Nanjing 211106)
Abstract: In order to improve the safe distance measurement accuracy for unmanned aerial vehicle (UAV) power line inspection, based on the analysis of binocular vision range and binocular camera calibration, safe distance measurement for power line inspection scheme of UAV binocular distance measurement is established. The binocular distance measurement principle is used to build test bench to set up the system of film image by Hough line test. The results show when the distance between the simulation and the power line is 15 m, the test distance of UAV which is equipped with a binocular rangefinder is close to 15m and the error is controlled within 5%. The UAV is very flexible in controlling catching up. When the UAV is disturbed by airflow during flight, the head angle will be changed.
Key words: Binocular ranging; Unmanned aerial vehicle; Line inspection; Safe distance
0 引言
目前,對物体图像进行多角度采集并根据视差分析原理来得到物体三维立体数据来重构物体与周围环境已经成为一项成熟技术,目前热点研究在三维立体信息的距离测试过程[1-3]。为实现对无人机电力线路巡检期间的飞行距离进行有效监测以保证其安全性,可以通过双目测距方法来测试无人机电力线路巡检的距离[4]。不同于传统形式的双目匹配算法,采用的处理方法不必利用卷积窗口来遍历左右图像的所有像素点,实现了快速匹配,减小程序冗杂性的目的[5-6]。
文献[7]利用图像识别的方法构建得到输电线路成像模型。考虑到进行实际应用的过程中会受到复杂背景的干扰,以本方法进行图像识别时会产生明显的噪声,只能得到模糊的杆塔边缘,因此计算几何关系时将会提高参数的误差;文献[8]设计了一种通过倾斜误差补偿矫正方法来实现对飞行器的图像测距信息采集。
1 双目测距系统
1.1 双目视觉测距
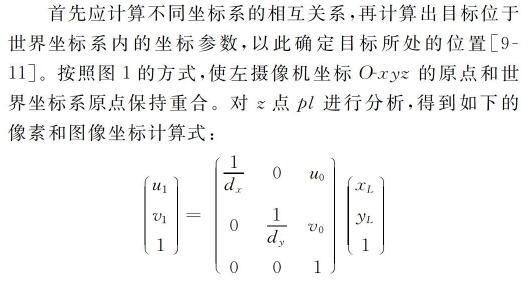
首先应计算不同坐标系的相互关系,再计算出目标位于世界坐标系内的坐标参数,以此确定目标所处的位置[9-11]。按照图1的方式,使左摄像机坐标O-xyz的原点和世界坐标系原点保持重合。对z点pl进行分析,得到如下的像素和图像坐标计算式:u1
v1
1=1dx0u0
01dyv0
001xL
yL
1
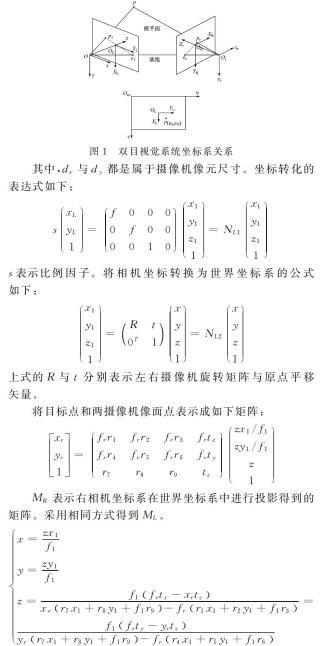
其中,dx与dy都是属于摄像机像元尺寸。坐标转化的表达式如下:sxL
yL
1=f000
0f00
0010x1
y1
z1
1=NL1x1
y1
z1
1s表示比例因子。将相机坐标转换为世界坐标系的公式如下:x1
y1
z1
1=Rt
0T1x
y
z
1=NL2x
y
z
1上式的R与t分别表示左右摄像机旋转矩阵与原点平移矢量。
将目标点和两摄像机像面点表示成如下矩阵:xr
yr
1=frr1frr2frr3frtx
frr4frr5frr6frty
r7r8r9txzx1/f1
zy1/f1
z
1 MR表示右相机坐标系在世界坐标系中进行投影得到的矩阵。采用相同方式得到ML。x=zx1f1
y=zy1f1
z=f1frtx-xrtzxrr7x1+r8y1+f1r9-frr1x1+r2y1+f1r3=
f1frty-yrtzyrr7x1+r8y1+f1r9-frr4x1+r5y1+f1r6 对方程组的各项参数进行研究得到本方法的实现过程,其中,z坐标表示空间点到左摄像机所在平面的垂直距离,等于需要测定的目标距离。
1.2 双目相机标定
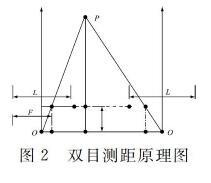
图2给出了双目测距原理。其中:P为被测试对象,L为左右相机的像面长度,O为光源焦点。分辨率为4 000*3 000的摄像头,焦距为25 mm,图像元大小为6*6 μm。最大视差为1 000像素,最低为10像素,测距范围在1-100 m。
表1给出的矩阵A属于相机的内部参数;R属于相机外部参数。
2 实验方案
之后开展仿真测试,图像数据的采集以滨河东路上的高压输电线作为目标,通过实验测试无人机安全飞行距离。根据测试得到实验结果来判断测距效率和准确性。本实验采用图像增强的方法来实现提高画面内输电线特征不明显部分的灰度值,促进图像质量的显著提高;之后,利用双边给滤波的方法来完成图像的滤波除噪过程,降低后面实验受到高频区域的干扰,再通过改进后的测距方法测试得到无人机与输电线之间的距离。
具体实验流程见下图3。对采集后的画面数据实施滤波处理得到图4。
3 实验结果分析
对输电线路图的拍摄是通过无人机搭载双目测距实景来完成,见图5。考虑到无人机在飞行阶段必然会出现机身摆动的情况,利用视觉库Opencv3.3.0完成实拍图像的Hough直线测试,图6给出对实拍图象实施二值化直线检测结果,其由三条线路进行直线贯穿形成左右图像。图7是矫正匹配后图像,实现了左右图像的直线行匹配。
此处对特征点实施距离计算,表2给出了Z坐标分析的数据,经过分析得到下述结果:
进行实地拍摄的过程中,从位于输电线的正下方和地面距离为2 m的位置控制无人机沿着和输电线方向保持垂直水平飞行,测定无人机与起飞位置的间距,到达约15米时停止,同时模拟和输电线相距15米的部位测距。在无人机上搭载双目测距仪,通过对比发现测试距离接近实际15米,误差被控制于5%范围内。实际测试过程中受到外界空气温度风力等的影响,使得结果存在一定的相对误差,但相对误差结果在控制误差精度内。
通过分析实际拍摄期间的所有环节,对存在的测试误差进行下述推测:利用无人机搭载双目测距仪,控制赶超非常灵活,当无人机飞行期间受到气流干扰后云台角度将发生变化,当基线长度约为1 m时,双目相机光轴无法垂直于目标表面,由此引起图像匹配产生畸变。
4 总结
选择VisualStudio2017软件进行开发,并利用视觉库Opencv3.3.0来完成实拍图像的Hough直线测试。得到如下结果:
1) 模拟和输电线相距15米的部位测距时,在无人机上搭载双目测距仪,通过对比发现测试距离接近实际15米,误差被控制于5%范围内。
2) 利用无人机搭载双目测距仪,控制赶超非常灵活,当无人机飞行期间受到气流干扰后云台角度将发生变化。
3) 该研究提高了巡检机器人的双目测距能力,对提高无人机电力线路巡检安全距离测量精度起到一定的理论铺垫。
参考文献
[1] 沈磊, 李昶君, 高坤,等.无人机输电线路巡检作业实施标准基于MD-1000型工业无人机[J].信息技术与信息化,2015(1):40-44.
[2] Araar O, Aouf N, Dietz J L V. Power pylon detection and monocular depth estimation from inspection UAVs[J]. Industrial Robot: An International Journal, 2015, 42(3):200-213.
[3] 刘壮,杜勇,陈怡,等. ±500 kV直流输电线路直线塔无人机巡检安全距离仿真与试验[J].高电压技术,2019,45(2):426-432.
[4] 彭向阳,陈驰,饶章权,等.基于无人机多传感器数据采集的电力线路安全巡检及智能诊断[J].高电压技术,2015,41(1):159-166.
[5] 郑天茹, 孙立民, 娄婷婷. 基于电磁场计算的输电线路无人机巡检安全飞行区域确定方法[J]. 山东电力技术, 2018, 45(2): 27-30.
[6] Paris S, Durand F. A Fast Approximation of the Bilateral Filter Using a Signal Processing Approach[J]. International Journal of Computer Vision, 2009, 81(1):24-52.
[7] 李军成. 图像边缘检测的分数阶微分算子研究[J]. 计算机应用与软件,2015,32(12): 206-209.
[8] 王方超,张旻,宫丽美.改进的Roberts图像边缘检测算法[J].探测与控制学报,2016,38(2): 88-92.
[9] 唐阳山, 徐忠帅, 黄贤丞,等. 基于Roberts算子的车道线图像的边缘检测研究[J]. 辽宁工业大学学报(自然科学版), 2017(6):383-386.
[10] 王爱民, 赵忠旭, 沈兰荪. 基于矢量Prewitt算子的多尺度彩色图象边缘检测方法[J]. 中国图象图形学报, 2018, 4(12):1024-1028.
[11] 李忠海, 宋智欽, 王崇瑶. 非整数步长的分数阶微分Sobel算子的应用[J]. 计算机工程与应用, 2018, 54(17):197-202.
(收稿日期: 2019.08.02)
作者简介:张静(1981-),男,潜江人,高级工程师,硕士,研究方向:电力机器人、人工智能、电力系统自动化和智能传感。
刘晓铭(1985-),男,揭阳人,工程师,本科,研究方向:机器人和人工智能技术。
黄国方(1971-),男,武进人,高级工程师,硕士,研究方向:电力系统自动化、机器人、人工智能和智能传感。文章编号:1007-757X(2020)02-0117-03
猜你喜欢
电脑知识与技术(2016年28期)2016-12-21
新教育时代·教师版(2016年27期)2016-12-06
农机使用与维修(2016年10期)2016-11-10
人间(2016年26期)2016-11-03
科技视界(2016年22期)2016-10-18
企业导报(2016年9期)2016-05-26
