基于LoRa的温室智能补光系统研制
2020-05-11 12:30李晋蒲曹瑞红赵建贵高安琪韦玉翡李志伟
江苏农业科学 2020年5期
关键词:温室
李晋蒲 曹瑞红 赵建贵 高安琪 韦玉翡 李志伟


摘要: 由于天气的影响,温室作物面临着光照不足、时间短且不均匀的问题,针对此现象研制了温室智能补光系统。该系统包括环境因子的采集器与控制LED亮度的补光器2个部分,均采用高速、低功耗的STM32核心处理器,利用LoRa无线网络实现采集器与补光器之间的数据传输。系统获取光照、温度、CO2环境等数据,并依据基于遗传学算法优化后的温室作物补光数学模型和作物所需最佳红蓝光阈值,对温室内的作物自动补光;补光器采用节能且使用寿命长的红蓝灯相结合的LED点阵。试验结果表明,本系统可以实现实时监测环境因子并获取环境数据,实现温室内的自动化补光,具有实用价值。
关键词: 温室;LoRa;LED点阵;智能补光
中图分类号: S625.5+2 文献标志码: A
文章編号:1002-1302(2020)05-0198-07
光是绿色植物进行光合作用的基础,是植物生长发育的必要前提[1]。受冬季天气的影响,温室环境并不能给作物提供充足的光照,致使其长期处于弱光状态,发育与生长速度缓慢甚至停止。因此,设计一套温室补光系统是极有必要的。温室内还存在光照不均匀的现象,为了使温室作物达到最佳的生长环境,需要进行多区域监测;传统有线传输存在布线困难、维护性差的问题,而传统的无线传输距离较短、功耗大。综合以上2点,系统采用新型无线LoRa(long range)网络进行数据传输。LoRa不仅传输距离远、成本低,而且还极大地改善了接收的灵敏度,大大降低了功耗。发光二极管(LED)相对于传统补光灯来说,具有光谱特性明显、电光转化效率高、易调光、工作电压低、发光均匀稳定和寿命长等优点[2-4]。以LED为主要补光设备为温室内的作物提供充足的光源,不仅可以满足温室作物生长所需的光质,并且功耗低、价格低廉[5]。现有补光算法大体分为2种:一种是基于净光合速率的补光数学模型,另一种是直接根据作物所需最佳光照进行补光[6-7]。两者都不能根据实际环境因子给予作物最佳补光数据,针对这种现象,系统以番茄为例,根据实际环境中温度和CO2浓度,采用了基于遗传学算法的温室作物补光数学模型,可以更加精准地提供补光数据。
系统分为环境因子的采集器与控制LED亮度的补光器两大部分。采集器主要是进行多区域监测,采集温室内不同区域的光照、温度和CO2浓度等信息,并将这些信息传输给补光器;补光器依据基于遗传学算法优化后的温室作物补光数学模型,对采集器传输的数据进行计算,得出该区的最佳光照,并与实际情况对比从而实现对不同区域的精准补光。本系统与传统的补光系统相比,区别在于可以依据温室内不同区域环境的差异和优化后基于遗传学算法的温室作物补光数学模型,分区域进行特定补光,不仅解决了温室内光照不均匀的状况,还能依据温室不同作物的补光阈值,实现多种作物的精准补光,耗能低,实用性更强[8]。
1 基于遗传学算法的温室作物补光数学模型以及优化
温室内部光照不均匀的问题普遍存在,因此对于温室内不同区域的作物进行同等强度的补光显然是不可取的。本系统采用补光模型,针对温室不同区域的环境因子实现分区补光[9]。现有遗传学算法寻优目标值模型,根据不同温度以及CO2浓度来探寻番茄的最优光合速率,基于此获得相应条件下的光子通量密度,也就是相应条件下的光饱和点;然后利用多元回归的方法,通过对不同的温度以及CO2浓度与相应条件下的光饱和点进行数据拟合,生成了以温度和CO2浓度为输入,光饱和点为输出的光环境目标值模型[10]。模型如式(1)所示。
ILSP=32.57+75.58T+0.461 7C-1.202T2-0.004 15TC+0.000 097 3C2。(1)
式中:ILSP表示作物的光饱和点,μmol/(m2.s);T表示温室内的温度,℃;C表示温室内CO2的质量分数,mg/kg。
系统采用该遗传算法寻优目标值模型作为补光模型。但由于此模型所针对的环境与本系统所针对的环境并不完全一致,在此对其进行了调整。根据本系统所针对的温室环境以及对所测数据的整理和计算,对式(1)优化处理,调整后的模型如式(2)所示。对模型结果进行分析,其确定系数R2为0.982,表明该模型具有良好的拟合成效;对模型进行验证,得出模型具有良好的测试精度和适用性,光饱和点的实测值与模拟值最大相对误差不超过5%。
ILSP=33.63+74.23T+0.451 9C-1.113T2-0.003 27TC+0.000 106 4C2。(2)
2 系统总体设计
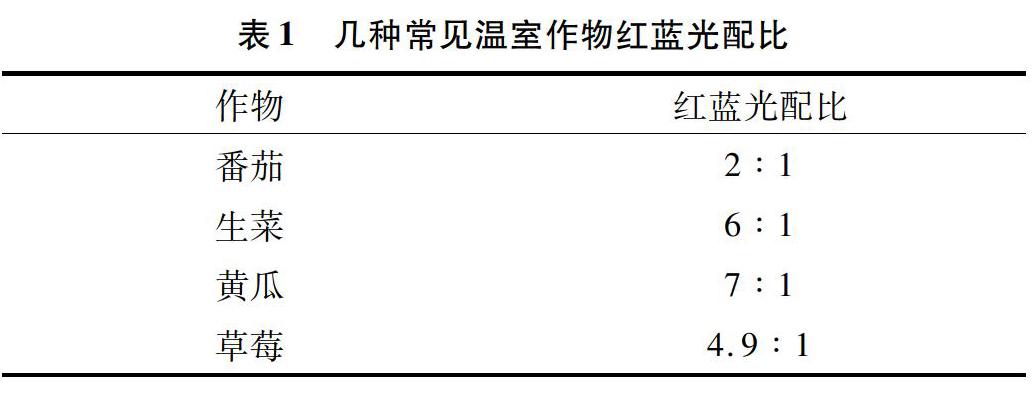
温室智能补光系统包括采集器与补光器两大部分。采集器由若干个采集区实现对温室内各区域光照度、温度以及CO2浓度等实时数据的采集。由于是分区域进行数据采集,有线传输布线困难,本系统通过LoRa无线单元将采集器各区数据信息分别发送至补光器;补光器依据数学补光模型计算出各区该温度与CO2浓度条件下温室作物所需最佳光强,与该区实时光照数据进行对比,再依据红蓝光配比给定阈值[11],红蓝光配比如表1所示。通过脉冲宽度调制(PWM)控制补光灯的亮暗程度,达到分区智能补光的效果。系统总体结构如图1所示。
3 硬件设计
3.1 采集器
采集器由电源模块、核心处理单元、LoRa无线单元、OLED屏以及多个采集区组成,每个采集区又包括光照单元、温度监测单元、CO2浓度监测单元3个部分。光照监测单元采用GY-30与ISL29020这2种传感器结合,主要用于监测温室内的光照度和红蓝光强;温度监测单元采用高精度的DS18B20,测量范围为-55~125 ℃,精度为±0.5 ℃[12],实时监测温室内的温度;CO2浓度监测单元采用S80053 CO2,实时监测温室内CO2浓度的变化,其测量范围为0~10 000 mg/kg,测量精度达到 ±40 mg/kg;OLED屏主要用来显示温室内的环境数据。
3.1.1 电源模块
温室中智能补光系统需要电源模块为其供给能量,因此电源模块是其不可或缺的一部分。本系统有相应的电源接口,可用电源适配器直接为系统供电。由于STM32F103CBT6芯片的额定工作电压为3.3 V,部分传感器的额定工作电压为5 V,所以在电源模块中必须进行降压处理。降压处理分为2个部分:一是以12 V为输入电压,使用AMS1117-5.0稳压器先将电压降为5 V,可以为部分传感器提供电能;二是以5 V为输入电压,使用AMS1117-3.3稳压器将电压降为3.3 V,从而为STM32F103CBT6芯片提供电源。电源模块的电路原理如图2所示。
3.1.2 核心处理单元
核心处理单元以STM32F103CBT6为核心处理器,处理速度达到72 MHz,引脚资源48个,GPIO口37个,IIC通信接口2个,满足设计需求。STM32F103CBT6以主流的Cortex为内核,性能极高,一流的外设以及低功耗的特性,使其应用起来更加方便。对于本系统来说,STM32F103CBT6芯片完全满足设计需求。
3.1.3 LoRa无线单元
无线单元需选用耗能低、远距离传输、抗干扰能力强的模块,表2为几种无线通信的对比。综合分析,该系统采用的无线模块其射频芯片SX1278主要采用LoRaTM远程调制解调器,以结合高效的循环交错纠错编码算法[13]。LoRa工作电流为12 mA左右,休眠电流为200 nA;其传输距离远高于其他无线通讯,普通环境下的传输距离能够达到3 000 m;抗噪能力强,LoRa的扩频因子可以达到6~12。
系统采用星型网络结构,采集器和补光器通过主动唤醒进行数据传输,实现系统低功耗策略。采集器通过定时器将LoRa唤醒,对补光器下达命令,采集器开始进行数据的采集和传输,完成后进入休眠状态。LoRa调制解调器使用隐式和显式的数据包传输格式[13]。LoRa数据包格式如表3所示。
LoRa数据包的传输周期涵括了发送前导码周期Tpreamble和报头及有效负载的传输周期Tpayload,前导码传输周期如式(3)所示。
Tpreamble=(npreamble+4.25)×Ts。(3)
式中:npreamble表示前导码长度,需在软件设计时设置,Ts表示LoRa符号速率,根据软件设置的信号扩频因子(SF)、编码率(CR)及信号带宽(BW)得到。计算公式为
Ts=2SF BW。(4)
对于数据包报头和有效负载周期的计算,首先确定符号npayload的数目,计算公式为
npayload=8+maxceil[JB([](8PL-4SF+28+16CRC-20IH) 4(SF-2DE)](CR+4),0[JB)}]。(5)
式中:PL是有效负载字节数;SF指扩频因子;IH=1是禁止报头,IH=0是使能报头;DE=1是开启低速率优化,DE=0是无低速率优化;CR指编码率,取值为1~4。
報头和有效负载传输周期公式为
Tpayload=npayload×Ts。(6)
数据包传输周期(Tpacket)公式为
Tpacket=Tpreamble+Tpayload。(7)
通过系统将信号扩频因子(SF)设置成12,编码率(CR)设置成1,带宽(BW)设置成7,采用自组网通讯协议提升无线传输速率。
3.1.4 光照监测单元
光照监测单元分为2个部分:一是以GY-30为主,对温室内整体光强进行实时监测;二是以光强传感器ISL29020和红蓝滤光片的组合为主,实现对室内红光和蓝光光强的监测[14]。
GY-30对环境的检测范围大、精度高[15-16]。利用GY-30监测光照度,与补光模型所计算出的最佳光照度进行对比,若大于最佳光照度,则关闭补光灯,反之,则进行补光操作。GY-30数字光照模块与核心处理单元的互联,并由核心处理单元(采集器)通过LoRa无线单元向补光器发送数据。
利用2个光强传感器ISL29020分别完成对红光和蓝光的监测和分析:在检测红光时,使用可使625~740 nm范围内红光透过的滤光片加在ISL29020上,使红光照射到ISL29020,从而使其检测红光;在检测蓝光时,使用可使400~480 nm范围内蓝光透过的滤光片加在ISL29020上,使蓝光照射到ISL29020,从而使其检测蓝光[11]。ISL29020与采集器中的核心处理单元相连,通过LoRa无线单元将获取的光照度传输给补光器。
3.2 补光器
补光器由核心处理单元、电源模块、LoRa无线单元、LED点阵灯、LED驱动单元5个部分构成。其中LED点阵灯、LED驱动单元组成了若干个补光区,与采集区一一对应,实现分区补光。LED点阵灯由红、蓝2种灯组成10×10的矩形阵[17],根据LED驱动单元的调节,实现对温室内部作物进行补光的变换;LED驱动单元主要对光环境进行调控,即改变LED点阵灯的亮度,将补光器中核心处理单元发出的微弱信号转变为大电流,由此完成光强信息动态调控的过程,可以根据温室作物所需最佳光照量,周期性地调节温室内的光强。
3.2.1 LED点阵灯
温室内植物的光合作用以及生长发育所需的主要光质是蓝光和红光[18],有研究表明,红光和蓝光组合可以明显提高番茄的光合速率,使其加速生长并改善其品质[11]。因此,选用红、蓝2种光源组合作为补光光源是比较理想的。基于上述原因,系统使用红、蓝2种LED灯源来为温室中的农作物进行补光。本系统选用的是超高亮度LED圆形灯[11],具体参数如表4所示。
由于单颗LED灯光照度有限,不足以补充足够的光照,在此将多颗LED灯进行了组合排列。除此之外,为了使各个植株可以同时吸收红光和蓝光,且使光源均匀,系统采用互相交叉的方式安装补光灯,红灯和蓝灯相互交错。综合上述2点,本系统采用了10×10的矩阵模型,每个灯四周排布了与其不一样的灯。其中,水平与竖直方向上每相邻两灯之间的距离经测验以2.2 cm最优。具体如图3所示。
3.2.2 LED驱动单元
相对于其他调光方式,PWM调光拥有绝对优势:(1)高精度,可以实现精准调光,从而使补光效果更佳;(2)可使LED灯保持在恒流条件下工作,大大减少了LED灯的损坏,提高其使用寿命;(3)颜色一致性好,可以极好地避免LED出现色偏[17]。基于上述几点,以及为了能够有效地控制红蓝补光灯的亮度,系统采用了PWM调光方式。
LED驱动单元以PT4115恒流驱动为核心,搭配电阻、电容、电感等元器件,构成驱动电路,具体如图4所示。PT4115恒流驱动通过DIM引进并直接接受PWM,支持PWM调光。此外,可以通过采样电阻Rs设定输出控制LED的最大平均电流[11],电流计算如式(8)所示。
Iout=0.1×D/Rs。(8)
式中:Iout是控制LED的最大平均电流;D是PWM的占空比;Rs为采样电阻。
驱动电路以及补光灯阵如图4所示。
4 软件设计
本系统的采集器和补光器均以STM32F103CBT6单片机为核心:采集器利用GY-30、ISL29020、DS18B20、S8 0053CO2这4种传感器实现对温室内环境因子的采集,通过LoRa无线单元再将数据传递给补光器,通过补光器对数据进行处理并实现自适应功能。该系统的程序流程图如图5所示。
首先对整个系统进行初始化,初始化成功后,采集器和补光器均做好准备。以采集一区为例:采集一区采集当前温室内一区的光照、CO2浓度、温度、红蓝光强等信息,并将这些信息通过LoRa无线单元传送给补光器[18]。补光器的核心处理器接收到数据后,通过补光模型计算出一区作物的最佳光照度,并与一区的实时光照进行对比:若实时光照度大于或等于最佳光照度,则使补光一区的灯为灭;若实时光照度小于最佳光照度,则对比红蓝光强是否小于预先设定的阈值,根据阈值与一区实际红蓝光强的差值,通过PWM改变补光一区LED点阵灯亮度,对温室内光照度进行调整。5 min后,采集一区重新采集数据,以此循环。其他采集区也依照采集一区的方法进行实时补光。
5 结论
根据温室作物在不同温度、CO2浓度的条件下所需的光饱合度和红蓝光阈值,本研究设计了一种基于LoRa温室智能补光系统,利用GY-30实时监测温室的整体光照情况,根据补光模型得到实际光照度与作物所需最佳光照的差值,核心处理单元通过改变PWM信号改变LED补光灯的亮度,来实现温室内的精准补光[19]。将该系统置于温室进行运行测试,结果表明,LoRa无线单元在数据发送与接收中传输良好,基本无误与延迟;采集器采集的数据精度比较准确,基本上完成了对温室内部环境的多区域监测;补光器能够根据数据信息发出PWM信号,准确调整LED点阵灯的亮度,实现对温室作物的精准补光[20]。本设计实现了对温室作物的自动化补光,并具有良好的稳定性,节约了人力,实现了温室作物高效定量的调控目的;其功能强、操作性好,具有成本低、可自动补光的优点,因此具有一定的社会价值和应用价值。
参考文献:
[1]朱 舟,童向亚,郑书河. 基于作物光照需求的温室光调控系统[J]. 农机化研究,2016,38(2):192-196.
[2]程望斌,刘金刚,刘碧篮,等. 自适应LED补光照明系统的设计与研究[J]. 湖南理工学院学报(自然科学版),2018,31(4):23-26.
[3]徐一清. LED組合光源的优化设计及其在温室植物生产中的应用[D]. 杭州:浙江农林大学,2017.
[4]付 明. LED植物生长补光灯在辽宁省茄果类蔬菜生产上的应用[J]. 蔬菜,2018(8):47-49.
[5]都金龙. 植物补光系统在温室中的应用[N]. 中国花卉报,2011-12-17(3).
[6]闫文凯,张雅婷,张玉琪,等. LED株间补光对日光温室番茄产量及光合作用的影响[J]. 西北农林科技大学学报(自然科学版),2018,46(7):132-138,146.
[7]赵秀元. 北方地区温室番茄栽培技术[J]. 山西农业科学,2009,37(7):87-88.
[8]王 静,崔庆法,林茂兹. 不同结构日光温室光环境及补光研究[J]. 农业工程学报,2002,18(4):86-89.
[9]徐 永. 温室补光及其发展趋势[J]. 农业工程技术,2015(28):29-32.
[10]胡 瑾. 基于作物光合需求的设施光环境调控方法与技术研究[D]. 杨凌:西北农林科技大学,2016.
[11]李 明,刘 娟,凌广明. 温室大棚LED智能补光自适应控制系统[J]. 江苏农业科学,2018,46(11):193-196.
[CM(29][12]周克辉. 基于单片机控制的DS18B20数字温度计设计[J]. 湖南农机,2010,37(11):61-62.
[13]柳永波. 基于LoRa的无线自组网MAC协议研究[D]. 陕西西安:西安电子科技大学,2017.
[14]张 辉,卜雯意,施 豪. 日光式室内植物生长LED灯模型的建立与实现[J]. 黄山学院学报,2018,20(5):36-40.
[15]韩 文. LED补光对番茄幼苗生长调控的研究[D]. 石河子:石河子大学,2018.
[16]邓一凡. LED植物补光系统优化设计与控制[D]. 天津:河北工业大学,2017.
[17]张现征,王 丹,董 飞,等. 不同比例红蓝光对番茄幼苗生长发育及光合特性的影响[J]. 江苏农业科学,2019,47(14):136-138.
[18]代家为. 温室大棚中智能补光控制系统的设计与实现[D]. 哈尔滨:黑龙江大学,2017.
[19]王 琦,梁铎耀,孙竹梅,等. 光热感应温室自动控制系统设计[J]. 自动化仪表,2018,39(9):59-62.
[20]马志远. 晋中市平川番茄周年生产技术[J]. 山西农业科学,2011,39(7):676-678,692.
收 稿日期:2019-11-25
基金项目:国家重点研发计划(编号:2017YFD0701501);山西省研究生教育创新项目(编号:2019SY201)。
作者简介:李晋蒲(1994—),女,山西晋城人,硕士研究生,研究方向为农业工程、农业电气化及信息化、农业物联网。E-mail:807349720@qq.com。
通信简介:李志伟,博士,教授,博士生导师,主要从事计算机控制技术、智能农业装备和生物环境测控技术研究。E-mail:lizhiweitong@163.com。
猜你喜欢
云南农业(2023年8期)2023-08-07
科学大众(2023年5期)2023-04-06
农业工程技术(2022年1期)2022-04-19
今日农业(2021年2期)2021-11-27
云南农业(2021年10期)2021-10-22
云南农业(2021年9期)2021-09-24
云南农业(2021年8期)2021-09-06
云南农业(2021年3期)2021-04-24
今日农业(2020年18期)2020-10-27
云南农业(2019年9期)2019-10-10