RFID区域定位算法的研究与应用
2020-05-11 11:00任崇广
网络安全技术与应用 2020年5期
◆秦 莉 陈 榕 任崇广
RFID区域定位算法的研究与应用
◆秦 莉 陈 榕 任崇广
(山东理工大学 山东 255000)
本文对RFID区域定位算法进行系统化的研究,通过对比测距技术和非测距技术,分析两种技术的优势与劣势,对RFID区域定位算法及技术实现进行描述。选取监狱这个特定实验场景后,对定位算法实验的结果进行了分析。
电子标签;定位算法;区域定位;自动识别
1 RFID介绍及原理
(1)电子标签
电子标签是一种自动识别技术,在近年来得到广泛应用。该技术可充分应用射频信号的传输特性,对处于各种状态下的物品进行自动识别,在监狱罪犯跟踪管理系统中的电子腕带、发卡器等设施中得以应用体现[1]。
监狱罪犯在服刑期间可佩戴基于射频识别工作标签的设备,另外此类工作标签可安装佩戴于监狱内各类设施以及物品之上,通过阅读器设施实现对电子标签射频信息的采集。阅读器具有一定的读取范围,当物品、人员等配有电子标签的其他因素进如阅读的读取范围内时,阅读器可及时检测并取得电子标签中所标识的信息并记录,完成对监狱内人员、物品以及各类设施、环境信息的识别和收集[2]。
根据电子标签技术的应用效果,该技术能够自动完成对物品、人员等基础性要素的识别,可真正节省人力资源成本。电子标签技术具有灵敏度高、模式多样、非接触式的特点,不仅支持只读工作模式,还支持读写工作[3]。该技术具备较强的适应使用环境的能力,能够适应监狱等较为复杂的应用环境;另外可适应高度的数据集成,并擅长于安全防护领域。
(2)RFID自动识别
在RFID的自动识别体系中利用到智能RFID以及读写设备(Read-Write Units)等设施,在监狱罪犯跟踪管理系统的软件应用部分与电子标签进行信息交互过程需要通过上述设备间的无线通信完成[4]。
可读写设备在RFID自动识别原理中占据重要地位,主要利用微波进行无线传输。可读可写设备主要由三部分组成:接口、控制器以及安全模块,以实现电子标签与读写设备间的数据安全交互的目的[5]。读写设备通过TCP/IP协议接口与上位机设备连接,接收到上位机所发出的命令和数据并进行反馈。
2 RFID区域定位原理
监狱罪犯跟踪管理系统的区域定位原理中应用了RFID半有源技术,在实际应用过程中可在被监控区域安装应用半有源技术的定位基站设施,并在设置中安装激活天线等设置。
区域定位原理如图1所示。
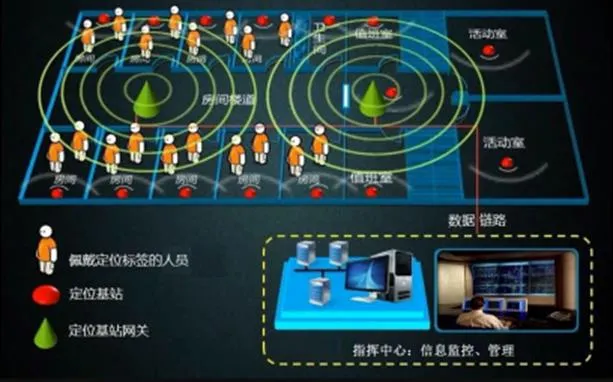
图1 区域定位原理图
定位基站是定位体系的基本单位,在确定激活标签距离范围的基础上,电子标签在进入到规定范围内后则自动被激活,且激活设施与地址码一一对应[6]。人员所佩戴的电子标签同样具备此激活特性,监狱管理人员通过激活设施发出的“激活码”确定标签所在位置并对人员或物品进行定位处理[7]。在激活设施位置移动的情况下,地址码会发生相应改变。在定位体系中标签可上传数据,并有定位基站接收,由管理中心处理接收到的信息,从而构建完整的区域定位体系。
RFID区域定位原理为:电子标签能够通过电磁波传输通道建立与读写器的联系,通过电感耦合或电磁耦合,电子标签将信息传递给读写器。但传递的前提是电子标签与读写器之间产生感应电流,即电子标签已经到达了读写器的读写范围之内。感应电流的能量能够激活电子标签,此时电子标签通过内置的天线,将其承载的信息通过接收天线、天线调节器传输给读写器,读写器对电子标签的数据进行解码,并发送给后台的主系统,主机系统则根据有效信息,利用逻辑运算识别技术,对配有该电子标签的卡片进行身份判断,在确定其合法性后,结合相关规定发出指令信号,控制执行系统工作。
RFID系统的关键技术包括信息的编码与调制、基带信号编码、基带信号调制等技术,能够通过对数据的保护以及校验、多标签识别、物理安全机制、认证机制等保障数据的完整性以及安全性。
3 RFID区域定位算法理论研究
RFID区域定位算法是该技术的关键,研究定位算法可以提高RFID区域定位系统定位的精度,提高整个区域定位系统的使用效率和生命周期。在RFID区域定位算法分析中,针对测距技术的定位算法和非测距技术的算法两种类型进行比较和分析。
(1)测距技术的定位算法
测距技术的定位算法是要求节点具备测距的能力或角度信息,具有定位精度高的优势。但是测距技术的定位算法对于节点硬件的要求较高,同时在定位过程中的能力消耗较大。此外,测距技术的定位算法对于环境的要求也比较高,需要注意节点的温度、湿度等环境因素。
(2)非测距技术的定位算法
非测距技术定位算法具有低成本、低功耗的优势。虽然非测距技术的定位算法的定位误差略高于测距技术的定位算法,但其定位精度仍然能够满足普遍的工作及生活需求。APIT定位法是典型的非测距技术的定位算法,指利用最佳三角形内点测试法,尽可能多地收集锚节点附近的信标节点,当信标节点的数量为时,按照数学中的排列组合方式,任意选取三个信标节点组成三角形,共有C3个三角形。随后对未知节点进行逐一地检测,测试其是否位于每个三角形中,测试完成后,计算包含未知节点的三角形重叠面积,并准确找出重叠区域的质心,即为未知节点的位置。
4 RFID区域定位算法的技术实现
监狱罪犯跟踪管理系统借助RFID的边界虚拟参考标签定位实现对监狱人员的定位,利用跟踪服务器对人员进行记录,保障监狱罪犯跟踪管理工作的顺利进行。
在位置分布内,T1、T2、T3、T4分布在区域内中间实际布置的参考标签上。在边界虚拟参考标签内设置了16个参考标签,通过原标签的定位结果得到虚拟参考标签的定位结果。在第一行内的四个标签中,通过阅读器能够得到对应的坐标值以及RSSI值,进而获取具体的定位值。
在监狱罪犯跟踪过程中应用少量的边界虚拟标签,不能确保定位的精度要求,另外由于监狱的区域面积比较大,因此应该通过网络虚拟标签算法,完成具体的区域定位操作。网络虚拟标签算法中,需要把边界虚拟参考标签和四个参考标签进行划分,将其分成N*N个网格,在对应的网格中增加网格虚拟参考标签。
5 RFID区域定位算法实验对比
为了能够更好地确定定位算法的定位精度,选择实际的实验场景和设备进行了定位算法的实验,在实验后得到了具体的实验结果并进行了分析描述。
(1)实验场景与设备
进行本次实验的场地为某监狱管理部门的监狱,选取的具体实验范围是31米*20米的室内空间中。对于实验范围中存在多次人员活动的情况,总共能够检测到52个不一样的AP数据信号,不同的位置参考数据内确定了RSSI超过-85dBm的AP进行定位资料的依据。
按照实验场景内监狱人员活动区的位置,在走道位置中挑选了75个参考值来完成位置指纹获取,两个参考值中的平均距离是3m。
(2)实验结果分析
对于选择的实验范围中确定了35个待定位点的实验内容,同时使用了两类匹配算法确定待定点位置,采用了DV-Hop定位算法和改进APIT定位算法。
K取2与3两种情况后,得到了加权K邻近算法的定位误差,得到的实验结果为:K的数值是2或3的情况下,加权DV-Hop定位算法的匹配精度不会出现变动,平均定位的差距当K为2时得到大概是1.89米,K为3时得到大概为4.05米。
改进APIT定位算法得到的定位返回则明显较高,平均定位误差范围在1.12米内,而且针对定位误差比较明显的待测点,利用APIT定位算法进行三角剖分后,明显降低了错误参考点作为定位数据的误差,增加了待测点相邻近参考点进行位置估算时的贡献范围,而且提升了定位的精度。
通过APIT三角剖分定位算法进行移动目标的定位后,通过实验结果可知,本定位算法能够较好满足已设定实验场景内的移动定位需要。
6 结束语
本文是RFID区域定位算法研究,针对RFID区域定位算法研究中,研究了RFID区域定位原理,对基于测距技术、基于非测距技术两种形式的定位算法进行了分析,完成了RFID区域定位算法及技术实现的描述。
[1]邓军,张效铭,叶楠.一种提高RFID技术安全性的设计[J].信息与电脑(理论版),2019,23(14):197-201
[2]史汝川,杨扬,韩韬.基于SAW RFID系统的标签距离估计[J].系统工程与电子技术,2019,41(11):2439-2445.
[3]陈明月.RFID无线射频识别技术在物联网的应用[J].信息与电脑(理论版),2019,32(13):174-175.
[4]陈龙鹏,叶宁,王汝传.基于双神经网络的RFID室内定位方法[J].计算机系统应用,2019,28(11):218-223.
[5]罗来曦.物联网中RFID安全技术研究[J].中国新通信,2019,21(18):154-155.
[6]张龙裔.RFID在智慧台站的应用[J].信息与电脑(理论版),2017,27(01):203-205.
[7]Oren Weimann,Raphael Yuster. Replacement Paths and Distance Sensitivity Oracles via Fast Matrix Multiplication[J]. ACM Transactions on Algorithms (TALG),2019,33(16):146-150.
本文受山东省自然科学基金(ZR2017LF004)资助
猜你喜欢
橡胶科技(2022年10期)2022-11-03
导航定位学报(2022年4期)2022-08-15
计算机技术与发展(2022年1期)2022-02-22
安徽警官职业学院学报(2020年6期)2020-07-21
电子制作(2019年19期)2019-11-23
动漫星空(兴趣百科)(2019年11期)2019-11-05
现代电子技术(2019年18期)2019-09-23
电子制作(2019年24期)2019-02-23
意林(2017年2期)2017-02-06
奥秘(2016年1期)2016-02-24