
高速机械手臂在自动化生产中的应用
2020-05-08 12:28陈飞
装备维修技术 2020年22期
陈飞
摘 要:传统的机械加工都是采用人工上下料,随着科学技术的飞跃发展,一些行业的零部件已采用专业化生产。大量的组合机床、非标专机应用而生。在其生产过程中使用机械手臂进行上下料.尤其对热锻产品的取放(高热、较重),大大地提高了生产效率和安全性,同时降低了劳动成本,产品质量也得到保证。本文介绍的一种高速机械手臂克服了以往机械手臂存在的不足之处。移动过程稳定可靠、取放位置准确.为专业化生产提供了可靠的保证。
关键词:机械加工;科学技术;生产效率;劳动成本
引言:高速机械手臂是以马达驱动实现三维空间移动,完成对加工对象的取放。这种新型的机械手臂相对运动精度高、速度快。对取放位置的精确度都提出了较高的要求。以往机械手臂大多存在因构件多致使整体的重量颇重,运动中容易产生晃动,速度快容易定位不准,造成机械手臂在移动时无法保证共稳定性。从而造成加工对象取放位置的精确度偏差,致使加工后的零件质量出提偏差。
技术方案:为保证该高速机械手臂在马达驱动后实现三维空间移动,达到对加工对象的取放,同时对以往机械手臂在应用中存在不足之处的克服。本高速机械手臂由升降单元、旋动单元、取放单元及升降台等组成。每个单元的动作可独立也可联合。
动作:
1.升降单元解决的移动为装载台的上下移动
2.旋动单元可实现机械手臂前后、旋转移动
3.取放单元可实施对加工对象的取放
4.旋转修正单元实现对零件摆放角度的调整
结构形式:
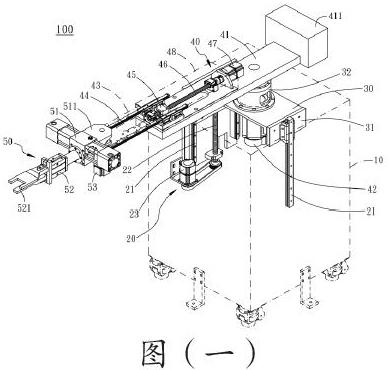
升降单元20在机架10相对两侧,装有三根直线导轨,在丝杆22两侧各装一根直线导轨,这三根直线导轨是垂直方向状态。当电机驱动时(23)由齿形带轮带动丝杆22转动,连接安装板31的丝杆螺母带动整个升降台上下作垂直运动,从三根直线导轨布局可以看出,单独一根丝杆导轨21固定在机架10上.起到平衡整个升降单元中件30.31.32的作用,装配时必须保证三根直线导轨的侧母线和上平面的平行度控制在设计要求之内。
旋转40装在装载台30上的件32 轴座上顶部,且以一旋臂驱动马达带动旋转单元40的旋转臂41作旋摆运动,旋转臂40上装一滑台装置,该滑台装置由驱动电机47带动丝杆46转动,再由连接在滑板上的丝杆螺母带动滑板43前后移动。整个旋转单元40的水平摆动由连接后轴座32上旋转臂41且以一旋臂驱动马达42带动旋转臂41旋摆达到水平摆动的目的。
取放单元50。包括一旋转缸和一个夹缸.旋转缸51装在移动滑台43的最前端.取放单元50以旋转缸51作为支撑主体,该支撑体固定在底座511上.且旋转缸51的外侧安装夹缸52,通过夹缸52与夹爪521之间的活动连接,旋转缸51下端位置安装有调整马达53,根据产品要求摆放角度方向,自动调整。
通过滑动台43沿旋转臂41的长度方向滑移,取放单元50随滑台43的滑移到达取放位量.取放单元50通过底座511微幅的水平摆动。以夹瓜521抓取工件再由旋臂驱动马达42带动旋臂41由左向右旋摆九十度。在丝杆22动作下,整个滑座31向下移动,到达机床夹爪位置,放下工件。
平衡装置411,由于旋转臂41上的滑台将取放装置50移动至整个高速机械手臂的最前端,为保证整个机床的平衡特别是取放装置处于最前端时,平衡放在旋转臂41的尾端装有平衡装置411
手臂动作过程:
升降单元20是在机架10相对的两侧有三个滑轨21,这三个滑轨21是在机架10内且呈纵向设置,装载台30是在机架10相对的两侧滑轨安装座上,通过驱动马达23作动时,第一导螺杆22可被载台驱动马达23带动而旋转,第一螺帽311随第一导螺杆22的旋转而带动滑座31进行升降的动作,装载台30则可随滑座31而上升或下降,装载台30有一轴座32,而旋动单元40有一旋转臂41,此旋转臂41是安装在轴座32上,旋转臂41以轴座32为中心而相对于装载台30水平旋摆,旋转臂41的水平旋摆是由一旋臂驱动马达42带动所致,旋转臂41上设有一滑动台43,此滑动台43可以沿着旋转臂41的长度方向滑移,此外,旋转臂41在异于滑动台43的一侧有一配重件411,滑动台43通过第二导螺杆46,呈横向设置,第二导螺杆46可由滑台驱动马达47带动而旋转,此时第二螺帽45随第二导螺杆46旋转而带动滑动台43沿着旋转臂41的长度方向滑移,取放单元50是设在滑动台43上,此取放单元50随滑动台43的滑移而可相对靠近机架10,或可相对远离机架10,因此,藉由滑动台43在旋转臂41上可滑移的设置,而使取放单元50可移至旋转臂41长度以外的位置,让取放单元50取放对象的范围更广,取放单元50包括一翻转缸51和一夹缸52,翻转缸51是设在滑动台43的一端,夹缸52轴接在翻转缸51,夹缸52两个夹爪521,翻转缸51可带动夹缸52沿一夹缸52轴心方向转动,并由夹缸52以其两个夹爪521夹取对象,或是松放对象,此外,翻转缸51在夹缸52的相反侧设有一底座511,底座511在滑动台43的一端轴接一调整马达53,调整马達53带动底座511沿一垂直轴向转动,且连动翻转缸51呈水平摆动,调整马达53,可带动翻转缸51水平摆动的较佳范围以向左右两侧分别摆动120度为最大角度,藉此可将所取放的对象分别往两侧方向分别旋转120度,以适应所取的对象不同角度的取放要求,由此可知,旋转臂41是能以大角度的方式旋摆,而可快速地将取放单元50所取的对象高速位移,而当旋转臂41定位而需要微调取放单元50的位置时,则不须再由旋转臂41摆动,仅须由调整马达53带动底座511水平摆动,以利于对象取放作业的顺畅,如上,旋动单元40的旋转臂41,可藉由旋臂驱动马达42带动而进行旋摆的动作,并可藉由滑动台43沿着旋转臂41的长度方向滑移至欲取放的对象的位置,同时,藉由载台驱动马达23带动第一导螺杆22旋转,带动滑座31进行上升或下降的动作,装载台30则可随滑座31而上升或下降,而设于装载台30的旋转臂41可在旋摆以及滑动台43滑移的过程中同时随装载台30升降,令取放单元50所取的对象能高速位移至定点放置。依次可实现上下运动,旋转运动,前后运动,翻转运动,取放动作,以及角度修正。
结论:该高速机械手臂的应用,大大提高了设备自动化程度提高了劳动生产率,降低了生产成本,手臂结构简单,布局合理紧凑,占用空间面积小,这种自动上下料的高速机械手臂经使用,动作可靠,取放精度高。在组合机床,专用设备,尤其锻造行业,专业化生产线必将得到广泛使用。
(南京鸿杰机电科技有限公司,江苏 南京 210000)
猜你喜欢
在线学习(2021年3期)2021-09-10
甘肃科技纵横(2020年9期)2020-11-06
甘肃科技纵横(2020年9期)2020-11-06
名城绘(2019年6期)2019-10-21
环球市场(2018年4期)2018-09-10
农家科技(2017年10期)2018-01-09
现代商贸工业(2016年25期)2016-12-26
商情(2016年43期)2016-12-26
考试周刊(2016年56期)2016-08-01
创新时代(2015年2期)2015-03-11
