
基于仿肌弹性欠驱动手的设计与分析
2020-05-08 02:41李泳耀
计算机集成制造系统 2020年4期
李泳耀,丛 明,2+,杜 宇,刘 冬,2
(1.大连理工大学 机械工程学院,辽宁 大连 116024; 2.大连理工江苏研究院有限公司,江苏 常州 213164; 3.英属哥伦比亚大学 机械工程学院,加拿大 温哥华 V6T1Z4)
0 引言
传统的机器人末端执行器一般是根据特定的任务或工序而设计的,夹持物体的方式通常为夹钳式或平行移动式,在实际应用中最为广泛[1]。但机器人智能化程度及作业水平的不断提高,对末端执行器也提出了更高要求,如任意不规则物体的抓取、精细化操作等[2]。人手具有灵活性高、柔顺性好、抓取物体范围广泛、可靠性高等特点[3]。因此,具有多自由度、多关节的仿人多指灵巧手成为智能型机器人末端执行器的发展方向,具有非常重要的研究意义,受到各国学者的普遍重视和研究[4-5]。
为追求最大程度的仿生性,专家学者在对手指解剖学及其运动机理研究的基础上,提出了许多基于仿生肌腱驱动的简化模型[6-10],这些模型比较准确地定义了人手指的结构及其运动特征,为灵巧手的研究提供了理论基础,比较典型的有Utah/MIT[11]、Stanford/JPL[12]、Shadow[13]、DEXMART[14]、CEA[15]、LMS[16]等。这些灵巧手具有较高的灵活性,但存在的共性问题是:肌腱及驱动单元数量较多,导致系统体积过大,实际应用困难。
针对上述灵巧手存在的缺点,在仿生肌腱驱动的基础上,各国学者通过引入齿轮、蜗轮蜗杆、弹性材料等机构,尝试采用较少的电机来驱动多个手指关节,即欠驱动手,如德国宇航中心的DLRⅡ[17],国内目前集成化程度最高的DLR/HITⅡ[18],以及国外比较典型的Barrett[19]、iHY[20]、ReFlex[21]等均采用了这种方式。这类灵巧手的特点是机构整体尺寸较小,便于集成安装于机械臂末端,同时其控制系统亦相对简单。DLRⅡ和DLR/HITⅡ手指的欠驱动系统采用“∞”字形的肌腱耦合机构,以实现两指节的同步运动,这在一定程度上模拟了手指关节的耦合运动,但手指的工作空间受到一定影响,且不同人的手指,其关节的耦合运动亦不尽相同。Barrett通过涡轮蜗杆与肌腱构成的耦合机构实现指根与指尖的联动控制,但作者在使用中发现其第一指节存在不能自动伸展的问题,iHY和ReFlex的3个手指结构相同,通过肌腱和弹性关节实现手指的强力抓取。Barrett、iHY和ReFlex通过巧妙的机构设计实现了很好的灵活性和抓取性能,而灵巧手抓取物体范围的能力还与各手指于手掌上的位置布置密切相关。
本文以人类手指解剖学特征及仿生肌腱驱动简化模型为思路,综合考虑手指最大包络抓取物体范围,提出一种新型的仿肌弹性欠驱动手装置,其欠驱动部分采用“═”型双肌腱传动,同时引入弹性元件,以保证手指的可达空间。手指尺寸与成年人手指相当,具有结构紧凑、模块化程度高、抓取物体尺寸范围大等特点。
1 仿肌弹性欠驱动手的机构设计
1.1 手指的机构设计
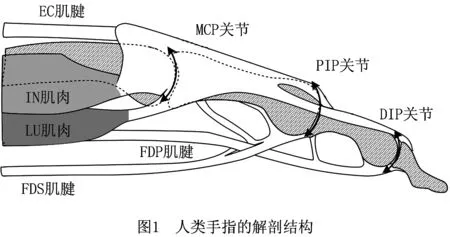
如图1所示,除拇指外,人类手指主要由5类肌肉驱动,分别是EC(extensor digitorumcommunis)、IN(interosseous)、LU(lumbrical)、FDP(flexor digitorumprofundus)和FDS(flexor digitorumsuperficialis),手指的3个关节分别为基关节(MetaCarPophalangeal,MCP)、近指关节(Proximal InterPhalangeal,PIP)、远指关节(Distal InterPhalangeal,DIP)[22]。具有如下特点:
(1)EC实现手指的伸展运动;
(2)IN和LU间存在一些冗余功能,主要贡献MCP关节的曲屈运动;
(3)FDP和FDS间存在耦合现象,主要贡献PIP和DIP关节的曲屈运动。
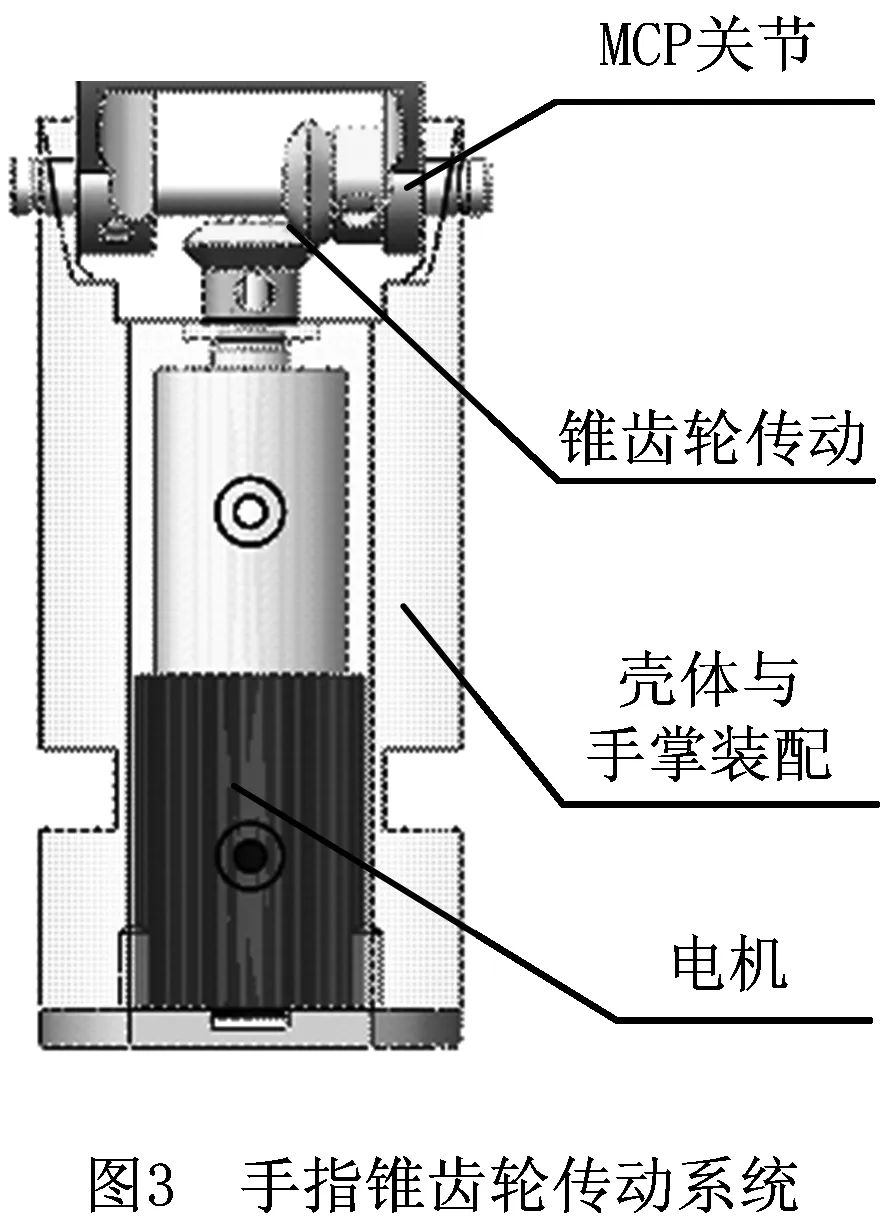
本文以仿生肌腱驱动简化模型为基础,为减少手指的肌腱和驱动单元数量,在MCP关节处引入锥齿轮传动机构,在PIP和DIP关节耦合处引入基于单电机和弹性元件的双肌腱欠驱动系统,设计原理如图2所示,MCP关节运动的机构实现如图3所示。

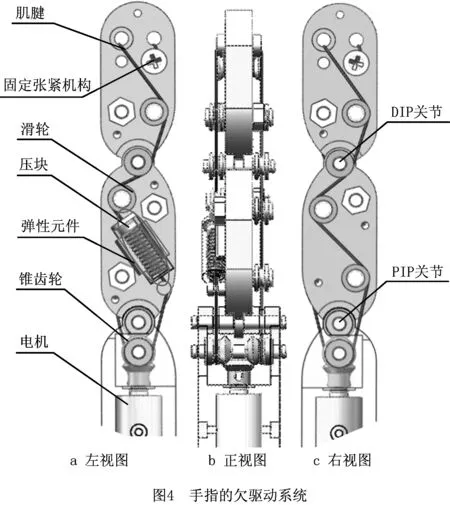
为保证手指的可达空间,在单电机、双肌腱的基础上引入弹性元件,最终实现本文手指的欠驱动系统,如图4所示。其欠驱动实现原理为:电机转动,间接带动左侧锥齿轮逆时针运动,左侧肌腱被拉动,由于弹性元件具有一定的预紧力,第二指节首先转动,直至接触到物体停止运动,此时弹性元件被进一步压缩,进而带动第一指节继续转动,直到碰到物体。该过程中,右侧锥齿轮与左侧锥齿轮的运动反向,故恰是右侧肌腱的释放过程。当电机反向转动,右侧腱绳被收缩,通过滑轮传递,从而实现指节的伸展运动。
1.2 欠驱动手的整体结构
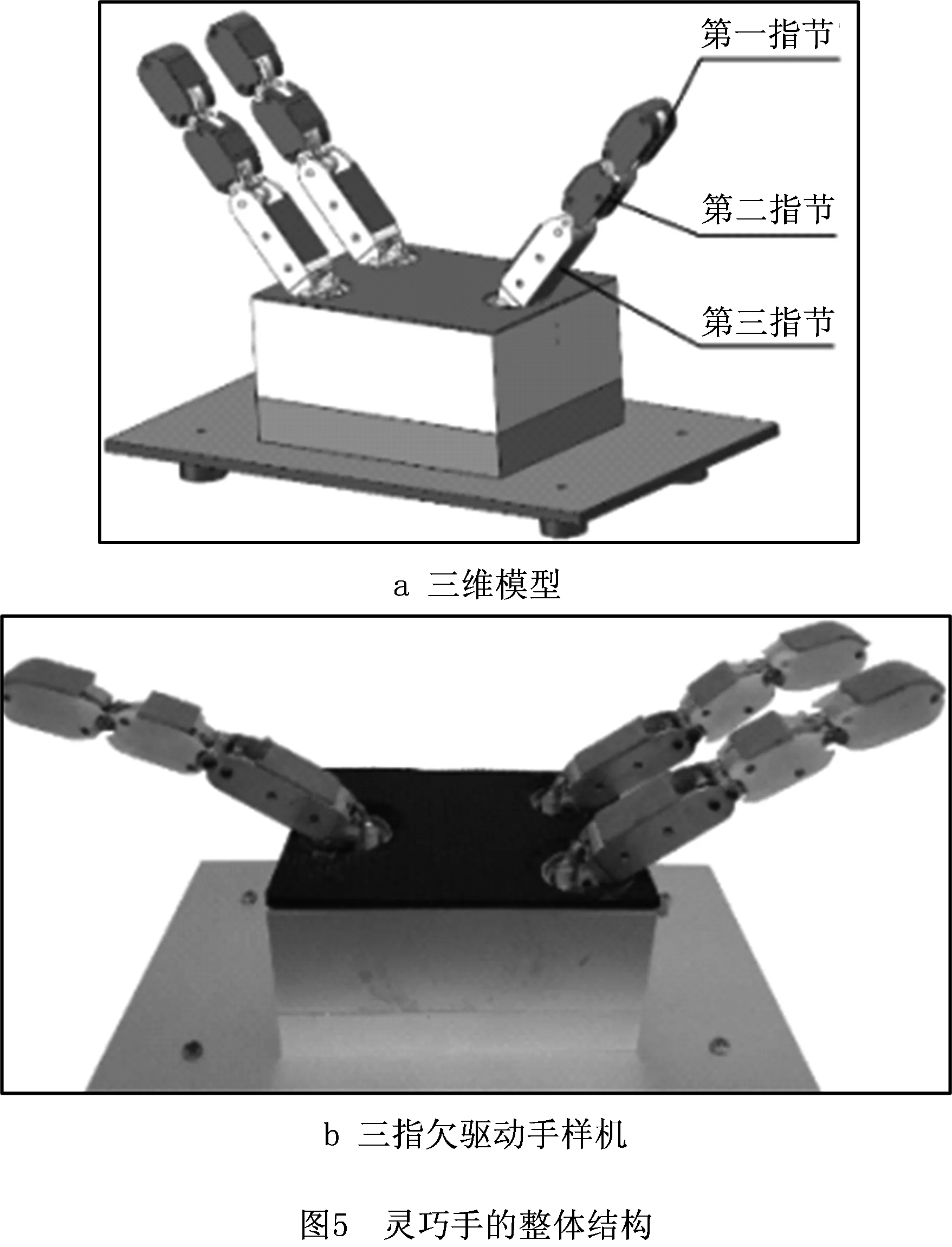
基于严格的模块化设计思想,手掌与手指均为独立单元,仅通过螺钉即可实现快速、可靠装配,手指内部集成了电机、霍尔传感器、传动机构等,可根据不同的手掌设计,自由组装为两指、三指、四指等欠驱动机构。如图5所示为装配完成的一种三指形式的欠驱动手样机,手指结构相同,手掌及每个指节表面附着有橡胶防滑垫,以增加与物体间的摩擦,有利于稳定抓取。
2 仿肌弹性欠驱动手的机构优化
2.1 基于最大抓取范围的手掌尺寸优化

(1)
由式(1)可进一步得到:
(2)
(3)
将式(1)和(2)带入(3),Li已知,得到关于D、L的隐函数关系f(L,D)=0:
(4)
式中:
问题转化为:求解L值,使得抓取物体的直径D达到最大。如图7所示,点A即为所求位置,坐标为(94.96,85.04),即此临界条件下,欠驱动手最大包络抓取圆柱物体的直径为D=94.96 mm,此时对应的两相对手指间距L=85.04 mm。
2.2 弹性元件的参数优化
本文手指欠驱动系统设计原理是基于弹性元件的压缩特性,其刚度与手指的抓取状态密切相关,直接影响着第一、第二指节的运动规律。刚度过大会导致指尖输出力减小,甚至导致第一指节不能运动到抓取位置点;反之,则会导致在第二指节到达抓取位置点前,第一指节却已开始运动。如图8所示,两种情况均会导致抓取物体不稳定,在设计过程中必须避免,因而需要对弹性元件刚度参数进行优化选取。
在手指各指节运动过程中,肌腱、弹性元件、指节质量、摩擦力等影响因素都处于动态变化中,很难对该过程进行定量的数学描述。为获取合适的弹性参数,本文从“极限”角度出发,分别分析手指在几个特殊位置下的运动情况,若弹性参数在这些位置下满足其运动条件,则同样适合于整个手指的运动过程。为便于分析,该过程首先忽略摩擦力。

(5)

(6)

由式(5)和式(6)及实际情况,得到4个约束条件:
(7)
由式(7)可获得理想状态下弹性参数的选取范围,如图11所示。在此基础上,综合考虑摩擦力等因素,引入安全系数1.5,并结合实验,以达到合理选择弹性参数的目的。本文最终选择的弹性元件参数:0.3(线径)×3(外径)×15(长度)。

3 手指运动学分析
基于仿肌弹性欠驱动手指的运动学描述的是手指运动与关节转角的关系,由经典D-H法可求解得到手指工作空间任一点(x,y)的表达式:
(8)
式中:φ、γ和η分别表示DIP、PIP和MCP关节角度;η可通过锥齿轮传动比直接获得;而φ、γ则由欠驱动手肌腱的位移量Δl决定,因此需建立关节空间到肌腱空间的映射关系[22]。
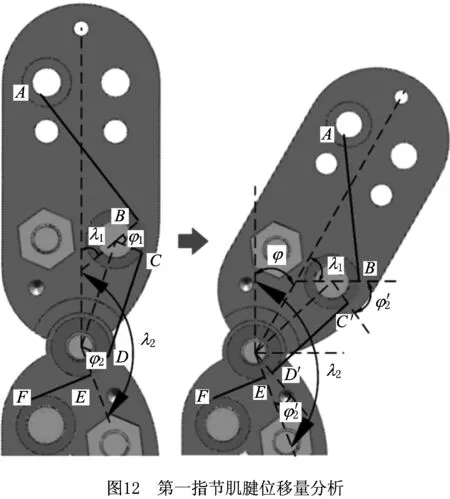
Δl由引起第一指节转动的腱绳位移量Δl1和引起第二指节转动的腱绳位移量Δl2两部分组成,则存在如下关系:
(9)

如图12所示,在指节转动过程中,A、B、E、F点位置始终不变,存在lCD=lC′D′,设滑轮半径r,则
(10)
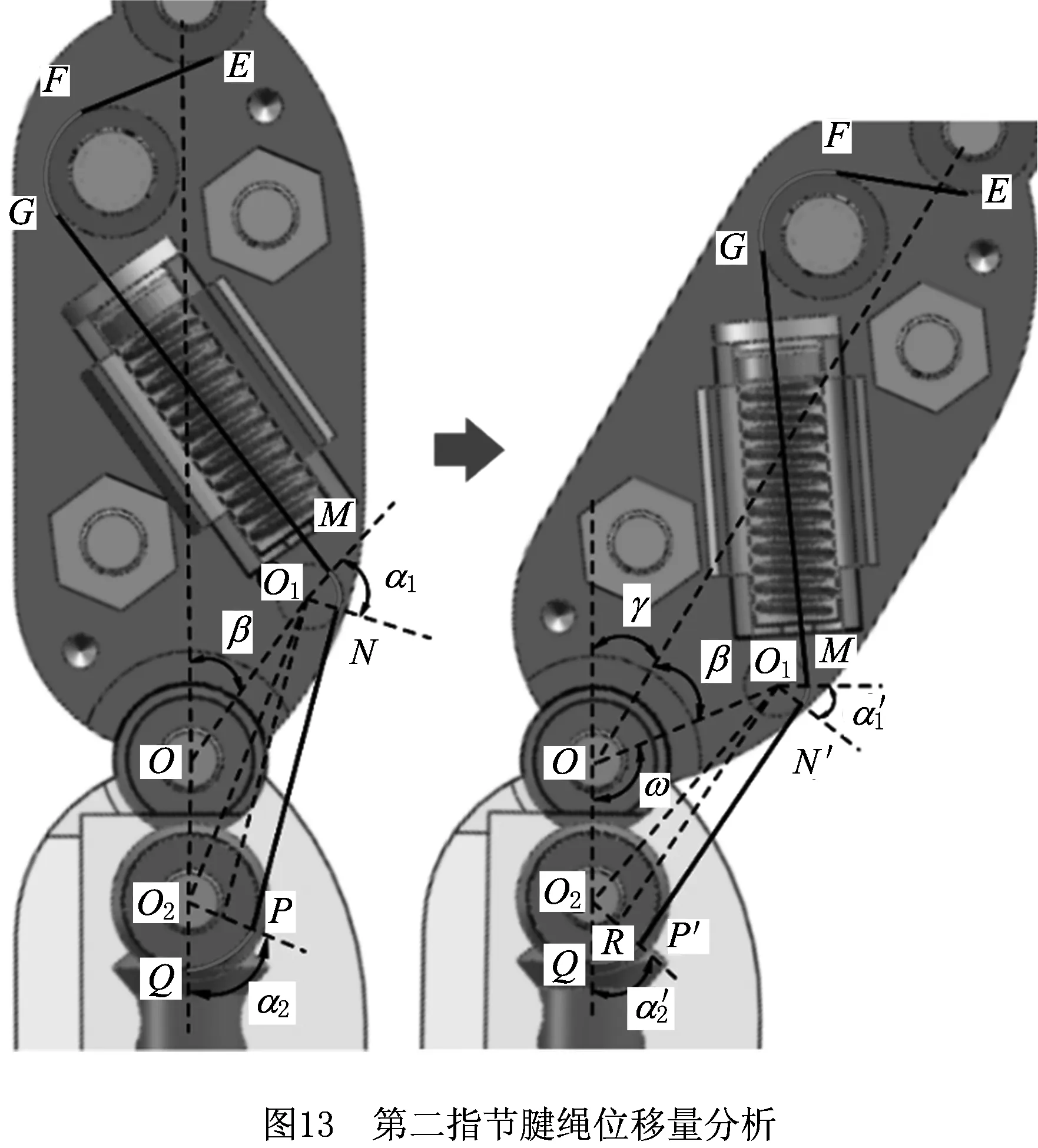
如图13所示,在指节转动过程中,G、M、Q点位置始终不变,因此只需计算点M、Q间线段的变化量。设临近弹簧槽处的小滑轮半径r1,锥齿轮绕线槽半径r2,则
(11)

(12)
(13)
(14)

4 仿真与实验分析
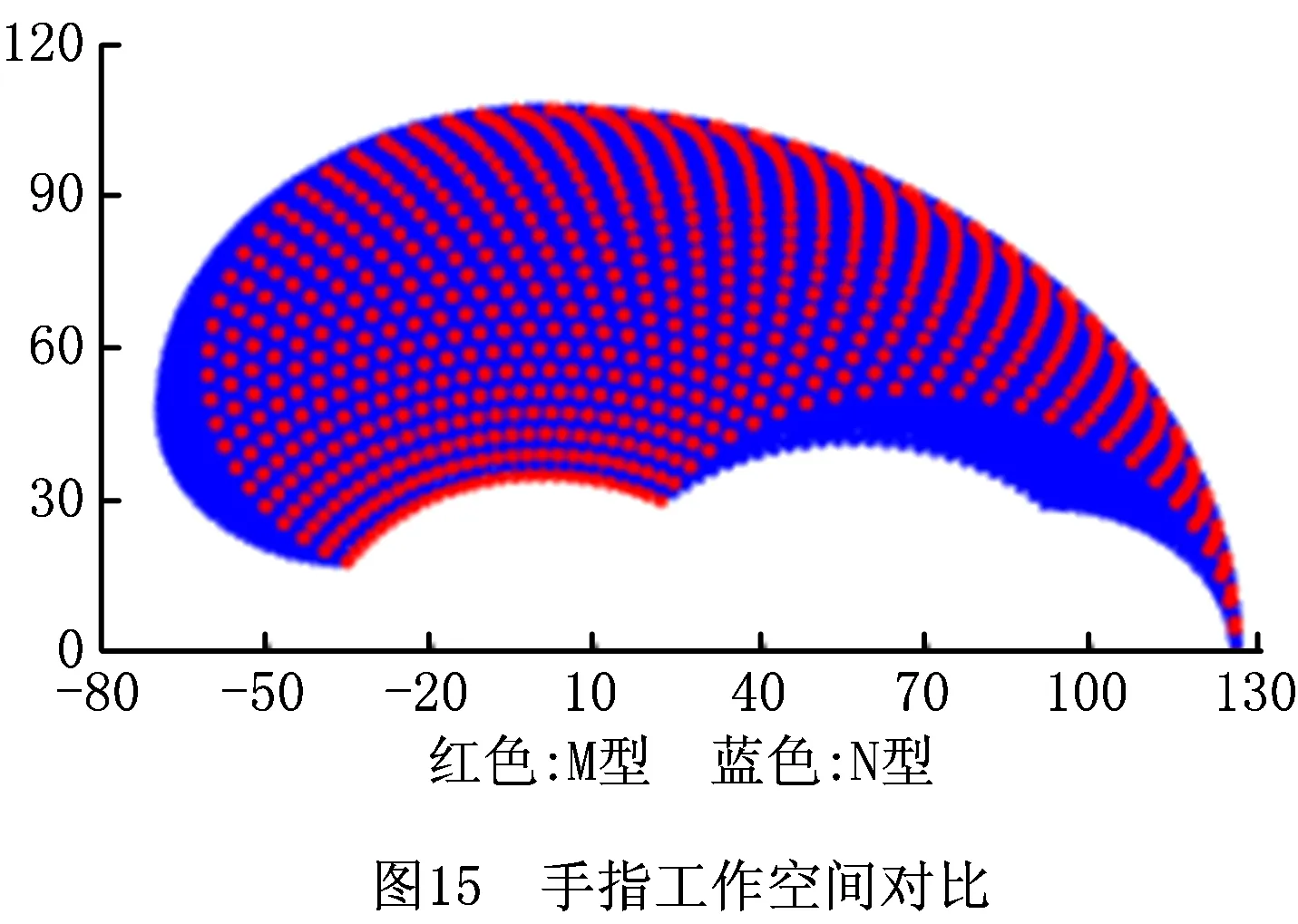
本文提出一种新型的仿肌弹性欠驱动手装置,为验证该欠驱动手指可达空间的优越性,如图15所示,为分别采用两种手指欠驱动系统(M型[17-18]和N型)的手指工作空间W仿真对比分析。可以得到:WN≈1.18WM,即本文的欠驱动手指具有更大的抓取物体的可达范围。
为确定欠驱动手的实际最大抓取范围,基于上文L=85.04 mm的优化结果,以“恰好”完全包络抓取为临界条件,进行物体的抓取仿真实验,同时为了直观表述,定义欠驱动手抓取物体能力的评价指标:
(15)
式中:D表示抓取物体直径,∑Li表示手指长度。如图16a所示,实际包络抓取物体的最大直径为83.16 mm,与理论计算值相比略小,这是由于理论分析中,将手指各关节简化为直线连杆,而实际中手指的宽度、厚度等参数均不可忽略。表1列出了各欠驱动手的抓取参数及评价指标结果(DUT代表本文的欠驱动手)。可以看出,相比于Barrett和JACO欠驱动手,DUT在抓取物体范围的能力方面更具优势。
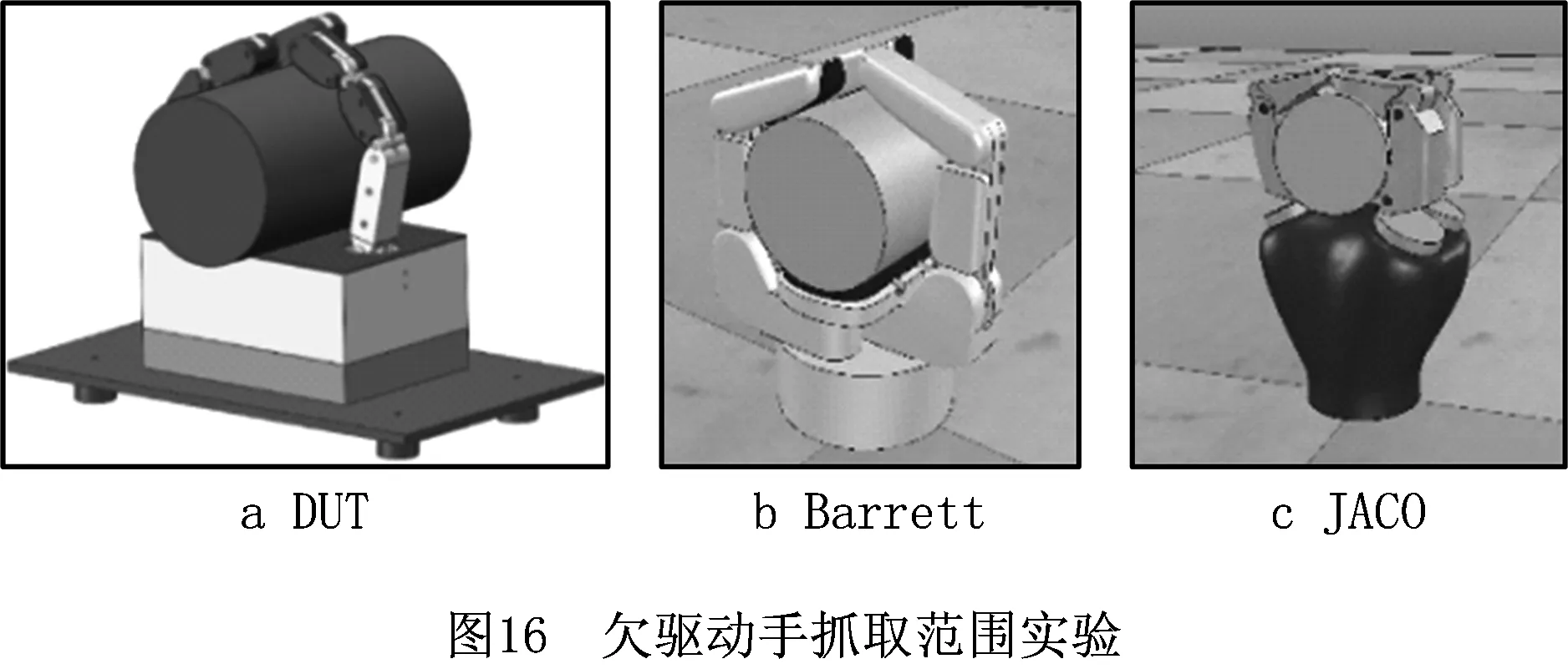
表1 欠驱动手评价指标对比

欠驱动手DUTBarrettJACOD/mm83.1669.650.4∑Li/mm12612080χ0.660.580.63
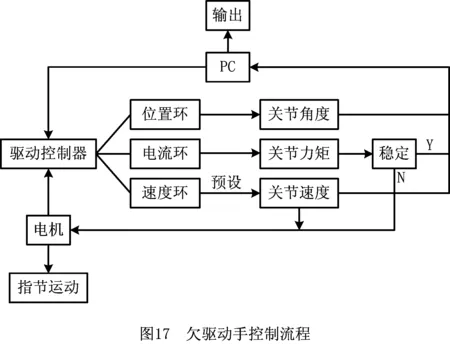
此外,为验证欠驱动手的抓取性能和欠驱动系统设计的可行性,本文进行了一系列实验。采用直流无刷电机(1218S006B,FAULHABER,Schönaich,Germany,减速比64∶1,霍尔传感器),在保证输出扭矩的前提下,同时具有很小的尺寸。控制系统主要包括PC、电机、驱动控制器等,其控制流程如图17所示。
为验证手指欠驱动系统的可行性,进行手指自由运动与加载运动对比实验。自由运动下,PIP指节反复多次弯曲、伸展,DIP指节均能保持相对静止,且电机速度平稳,如图18a和图18c所示。加载运动下,PIP指节运动到一定位置被动停止后,弹性元件被逐渐压缩,DIP指节继而开始包络转动,DIP指节运动到极限位置时的最大电流为782 mA,电流损耗较小,从而也验证了弹性元件参数选取的合理性,如图18b和图18d所示。

此外,为验证欠驱动手的自适应和包络抓取能力,进行了一系列不同物体的抓取实验,如图19所示。对于近圆柱形物体,手指的三个指节均能实现有效的自适应包络抓取;对于薄面体,由于指节的转动角度有限,偶尔会出现第一指节无法完成包络物体的情况,但此时第二、三指节已实现对物体的力封闭包络,因此亦能实现有效的包络抓取。实验表明,对于常见的尺寸、形状各异的物体,欠驱动手均能实现成功抓取。

5 结束语
本文提出一种新型的仿肌弹性欠驱动手装置,手指尺寸与成年人手指相当,具有结构紧凑、模块化程度高、抓取物体尺寸范围大等特点。手指的欠驱动系统通过双肌腱和弹性元件实现,同时给出了合理选择弹性参数的方法,以保证手指的可达空间和抓取的稳定性。通过优化手指于手掌的位置参数,得到“恰好”完全包络抓取的最大物体直径为83.16 mm,并给出了评价指标,对比验证了该方法的优势。最后,进行了不同形状、尺寸物体的抓取实验,结果表明该欠驱动手具有较强的自适应抓取能力、广泛的物体抓取范围,下一步将结合力/力矩传感器进行手指的精细化操作研究。
猜你喜欢
实用手外科杂志(2022年2期)2022-08-31
实用手外科杂志(2022年2期)2022-08-31
实用手外科杂志(2022年2期)2022-08-31
实用手外科杂志(2022年2期)2022-08-31
实用手外科杂志(2022年2期)2022-08-31
网络安全技术与应用(2022年5期)2022-07-26
作文中学版(2022年12期)2022-02-10
小聪仔(婴儿版)(2020年12期)2021-01-26
中国设备工程(2017年11期)2017-06-29
创造(2016年5期)2016-02-01
