纯电动汽车电机控制器CAN通信丢失故障处理方法
2020-05-07 06:21晶LiWeiWangJing
北京汽车 2020年1期
李 玮,王 晶Li Wei,Wang Jing
纯电动汽车电机控制器CAN通信丢失故障处理方法
李 玮1,王 晶2Li Wei1,Wang Jing2
(1. 北京新能源汽车股份有限公司 工程研究院,北京 100176;2. 廊坊职业技术学院机电工程系,河北 廊坊 065000)
给出了一种适用于纯电动汽车电机控制器由于电磁干扰导致CAN(Controller Area Network,控制器局域网络)通信丢失的故障处理方法。该方法通过电机控制器中间层软件发送CAN通信生命信号的方式实现应用层软件对零部件CAN通信状态的监控,应用层根据生命信号计算出CAN通信的丢帧率,并评估出CAN通信丢失状况,在此基础上对与电机控制器通过CAN通信的零部件按照通信故障后的危害程度进行分级,并分别给出了不同严重程度下各零部件的通信丢失故障处理方法。该方法在不改变现有设计方案及硬件选型的基础上,充分通过策略优化将电机控制器CAN通信故障的危害程度降低,在一定程度上提高了系统的可靠性,同时提高了车上人员的驾乘感受。
纯电动汽车;通信丢失;故障处理
0 引 言
车辆作为当今世界的重要交通工具,其行驶环境复杂多样,与传统燃油车不同,纯电动汽车存在大量的高压零部件,如动力电池、驱动电机、电机控制器、空调系统(压缩机与加热电阻)、DC/DC(Direct Current/Direct Current,直流/直流转换器)等,因此面临着比传统燃油车更为严峻的电磁干扰问题[1-3]。电磁干扰能够干扰传感器、通信等系统的正常工作,进而引发安全隐患,也因为如此,纯电动汽车的电磁干扰问题也是当前研究的热点之一[4-5]。目前解决纯电动汽车电磁干扰问题主要从3个方面着手,一是设计源头优化;二是硬件防御;三是软件防护。设计源头优化指的是在系统设计的初始阶段就采用各种措施,如通过优化设计方案等,来避免或减少未来产品的电磁干扰问题;硬件防御一般指的是通过提高零部件等级与抗干扰能力降低电磁干扰问题对系统整体的影响;软件防御则是在现有电磁环境下,通过合理设计软件策略来降低电磁干扰对车辆的影响。一般而言,首先需要通过设计优化来避免或减少后期产品的电磁干扰问题,在此基础上提高硬件水平,软件防御大多是作为最后的手段来弥补电磁干扰对系统的影响。
针对纯电动汽车行驶工况的复杂多样,以及由于自身特性导致当前阶段车辆电磁干扰未被完全解决的问题[6-9],提出了一种适用于纯电动汽车电机控制器由于电磁干扰导致CAN通信丢失的故障处理方法。该方法通过电机控制器的中间层软件发送CAN通信生命信号的方式实现应用层软件对零部件CAN通信状态的监控,应用层根据生命信号计算出CAN通信的丢帧率,并评估出CAN通信丢失状况,在此基础上对与电机控制器通过CAN通信的零部件按照通信故障后的危害程度进行分级,并分别给出了不同严重程度下各零部件的通信丢失故障处理方法。该方法在不改变现有设计方案及硬件选型的基础上,充分通过策略优化将电机控制器CAN通信故障的危害程度降低,在一定程度上提高了系统的可靠性,同时提高了车上人员的驾乘感受。
1 电机控制器软件架构
MCU(Motor Control Unit,电机控制器)的软件构架如图1所示。
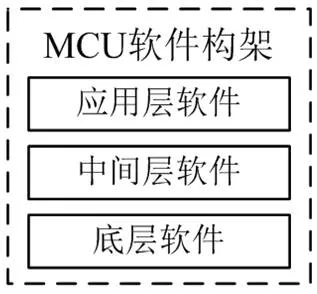
图1 电机控制器软件构架
电机控制器软件可分为3层,分别为应用层、中间层与底层。应用层为具体的控制算法实现提供支持,如弱磁控制、电流环控制等,其目的是生成具体的控制器代码;中间层为应用层的功能实现提供支持,如操作系统一般在这一层;底层为中间层提供具体支持,是硬件与软件沟通的桥梁,如提供通信驱动,实现A/D(Analog to Digital,模拟数字转换器)功能等,并向中间层提供控制和算法所需要的接口。
2 CAN通信丢失检测与严重度分级
CAN通信丢失故障处理方法主要由中间层与应用层共同实现。
由中间层判断某零部件的CAN通信状态,并按照固定周期n向应用层发送生命信号Counter,其中中间层每接收到一次CAN生命信号Counter便自动加1;令该零部件的CAN报文发送周期为,则应用层每×时间判断一次生命信号Counter的增量(其中×为一个检测周期,为正整数,>0),定义Counter的增量为n,在此基础上得到本次检测周期内的CAN丢帧率,具体为

式中:CANloss为本次检测周期内的CAN丢帧率。在计算出CAN丢帧率的前提下评估CAN通信丢失的严重程度,具体逻辑如图2所示。
其中为连续一定检测周期条件下的CAN通信丢帧率。如图2所示若小于等于规定阈值1,则认为此时CAN网络处于轻度丢失状态(轻度级别,该级别包括无丢帧情况),同时认为对行车安全无影响;若1<则由轻度CAN通信丢失状态跳转到中度CAN通信丢失状态(中度级别),此时认为对行车安全有轻微影响;若值继续升高并超过2,则由中度CAN通信丢失状态跳转到严重CAN通信丢失状态(严重级别)。若值降低,则可以从严重级别向中度及轻度级别跳转,在跳转过程中引入了滞环参数(>0),以防止相邻状态间的频繁切换。
车辆中不同零部件会根据其所实现的功能按照不同的周期发送CAN报文,中间层利用固定周期n进行计数,并输出CAN通信生命信号,在应用层中根据该零部件CAN报文发送周期进行丢帧率的计算,保证中间层软件的可移植性,使其便于平台化推广。相对于中间层来说,应用层软件更加易于修改,并且在车辆开发过程中,时常会根据CAN总线负载率来调整零部件的CAN报文发送周期,因此对于应用层软件来说可将零部件的CAN报文发送周期设定为标定量,之后根据需求的变化对其进行调整,不仅方便软件开发,同时能够保证中间层软件的一致性。
3 CAN通信零部件分级
为保证电机控制器的功能实现,需要与6个外部零部件进行CAN通信,分别为ICM(Instrument Control Monitor,仪表控制器)、DC/DC(Direct Current/Direct Current,直流/直流转换器)、ABS(Antilock Brake System,制动防抱死系统)、ESP(Electronic Stability Program,车身电子稳定系统)、VCU(Vehicle Control Unit,整车控制器)、BMS(Battery Management System,电池管理系统),电机控制器与以上6个部件发生通信丢失故障后对整车安全造成的影响是不同的,因此根据发生CAN通信故障后的危害对以上6个零部件进行分级,如图3所示。
ICM、DC/DC与电机控制器发生CAN通信故障时对整车安全影响较小,即使接收不到ICM与DC/DC的CAN报文也不会影响电机控制器的正常工作与行车安全,因此将这2个零部件的CAN通信故障危害等级定为低;行车过程中,若接收不到ABS与ESP的CAN报文,会影响电机控制器的制动能量回收功能,进而对驾驶员的驾乘感受造成影响,因此将这2个零部件的CAN通信故障危害等级定为中;若电机控制器接收不到VCU或BMS的CAN报文,会使电机控制器无法接收到VCU的控制命令、扭矩命令、电池的SOC和电池最大放电功率值等信息,影响电机的扭矩输出和功率输出,同时危害行车安全,因此将这2个零部件的CAN通信故障危害等级定为高。
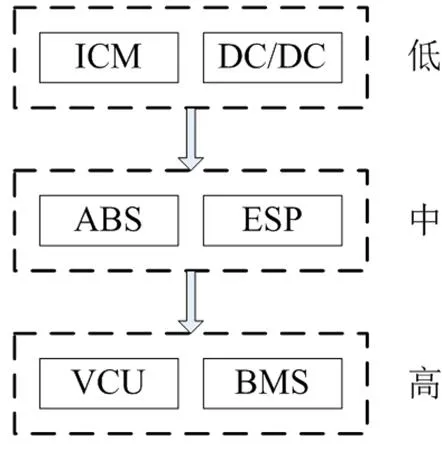
图3 CAN通信故障零部件危害等级
4 CAN通信丢失电机控制器故障策略
结合CAN通信丢失的严重等级,给出各零部件发生通信丢失后的故障策略,见表1。

表1 电机控制器CAN通信丢失故障及应对策略
5 结 论
纯电动汽车电机控制器CAN通信丢失故障处理方法首先根据中间层发出的生命信号提出一种判断CAN通信丢失程度的机制,根据计算得到的丢帧率将CAN通信丢失分为轻度、中度以及严重3个级别,为后续制定零部件CAN通信丢失故障策略提供了量化依据;另外该方法对与电机控制器进行CAN通信的各相关零部件按照通信丢失后的行车危害程度进行了区分,分为轻、中、严重3个等级,同样为制定通信丢失故障具体策略提供了参考。在此基础上针对同电机控制器进行CAN通信的6个部件给出了一套CAN通信丢失故障的处理方法,其中6个零部件分别为ICM、DC/DC、ABS、ESP、VCU和BMS。所给出的故障策略以CAN通信丢失程度及各部件通信丢失后的安全危害程度为主要依据,在所制定的策略中,当通信丢失危害程度较低时,充分考虑驾驶员的行车感受,尽量减少对车辆的限制;当危害程度达到一定程度后,通过主动限制(限制扭矩、功率输出、关闭PWM)、点亮报警灯、鸣报警音等方式降低安全隐患、提醒车上人员,为行车安全提供了有力保障。
以上电机控制器CAN通信丢失故障处理机制已经广泛应用于量产纯电动汽车产品中,并取得了良好的效果。
[1]宋保林,陶银鹏.纯电动汽车电机控制器传导性电磁干扰抑制[J]. 汽车工程,2013,35(11):996-999.
[2]蒋晓琴. 浅谈纯电动汽车与燃油汽车电磁干扰的区别与联系 [J]. 汽车电器,2018(8):11-12.
[3]王若愚,畅温隆,张攀. 新能源汽车法规符合性研究[J]. 汽车实用技术,2018(21):24-26.
[4]李兴宇. 纯电动汽车电磁兼容分析与电磁干扰抑制[J]. 汽车零部件,2017(10):77-79.
[5]李旭,王丽芳,何举刚,等.电动汽车BMS 电磁兼容性能优化研究[J].电工电能新技术,2014,33(3):39-43.
[6]武哲,高松,李军伟,等.纯电动汽车时间触发总通信协议网络消息调度策略研究[J]. 科学技术与工程,2017,17(9):279-285.
[7]王振国. 基于CAN总线的纯电动汽车组合仪表设计[J]. 上海汽车,2013(3):21-24.
[8]韩友国,王若飞,陶颖,等. 纯电动汽车CAN总线通信系统研究[J]. 科技视界,2018(1):1-3.
[9]钟勇,钟志华,余群明,等. 电动汽车CAN总线通用协议的应用研究[J]. 汽车工程,2006,28(5):422-426.
U463.6
A
10.14175/j.issn.1002-4581.2020.01.010
1002-4581(2020)01-0035-04
猜你喜欢
汽车电器(2022年9期)2022-11-07
电子技术与软件工程(2022年11期)2022-09-09
舰船科学技术(2022年11期)2022-07-15
中国自行车(2022年3期)2022-06-30
汽车电器(2021年6期)2021-07-05
科学家(2021年24期)2021-04-25
网络空间安全(2019年8期)2019-03-18
电子技术与软件工程(2017年3期)2017-03-22
教育教学论坛(2016年49期)2017-02-27
物联网技术(2015年8期)2015-09-14