
食品自动装箱并联机器人的设计及仿真分析
2020-05-06 02:48吴萍
食品工业 2020年4期
吴萍
常州工业职业技术学院(常州 213164)
在生产量大的食品行业,为提高生产效率,一般需要快速准确地完成袋装食品装箱,而传统人工操作不但容易发生装箱错误且人工成本越来越高,所以用机器人取代人工是一个必然趋势[1-2]。
食品工业中应用的装箱机器人大部分是串联机器人,它是由各个运动关节依次串联组成的一个开式机构,其结构特点导致其具有刚度低、承载能力小、定位精度低等缺点,而并联机器人其结构是一个闭合机构。并联机器人与串联机器人相比,具有高刚度、大承载能力、高定位精度以及很好的动态特性等特点[3],因此并联机器人被大量应用于需要快速精确完成任务的工况中,在电子、食品、医药等行业的拾取、分拣、装箱等工序上具有广阔市场前景。
1985年,瑞士Clavle发明Delta并联机器人,被广泛应用于分拣行业,它是世界上应用最多的并联机器人结构[4-6]。以Delta并联机器人为原型,设计一种用于食品装箱的四自由度并联机器人。
1 机器人结构设计
根据食品装箱工序的特点,选用四自由度并联机器人,以Delta并联机构为原型设计[7-8],设计的并联机器人主要由4组相同的基于平行四边形机构的传动铰链组成,其动平台与静平台在任何时刻都能保持平行,并增加末端执行器的旋转运动,也就是说它具有X、Y、Z3个方向的移动及绕Z轴的旋转4个自由度。
其结构如图1所示,主要由驱动部件、静平台、动平台、主动臂、从动臂以及执行结构组成,由主动臂从动臂组成的4个传动支链均匀对称布置,动平台上通过齿轮连接末端执行器,使末端执行器能做相对转动,所有驱动均采用伺服电机,主动臂和从动臂用碳纤维材料加工成型,整体结构质量轻,能够具有很高运动速度和加速度。
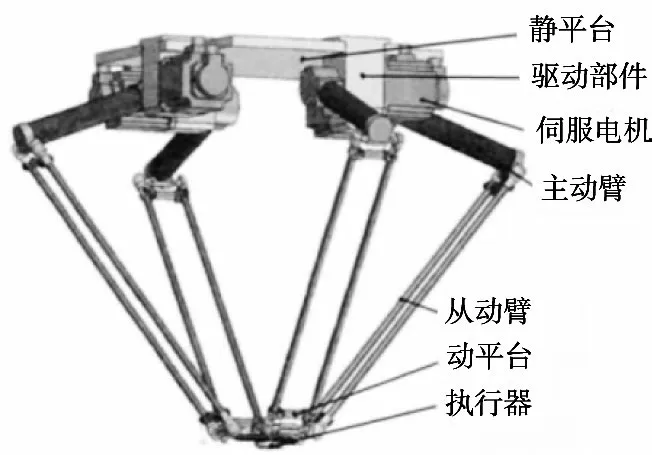
图1 四自由度并联机器人三维模型
2 运动学分析
运动学分析是研究主动臂输入角度与并联机器人的末端执行器的速度和加速度之间的关系,也就是求并联机器人的雅克比矩阵。对并联机器人进行雅克比矩阵的研究可以校核并联机器人结构设计参数,并可为机器人的结构优化提供理论依据,雅克比矩阵也是评价并联机器人运动性能的重要依据[9-11]。
对并联机器人进行结构简化后,建立数学模型,如图2所示。
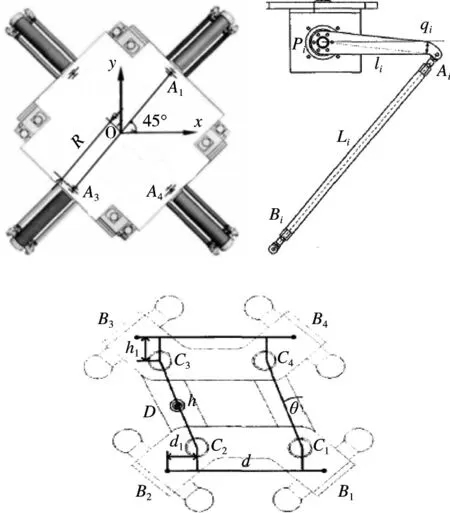
图2 数学模型参数
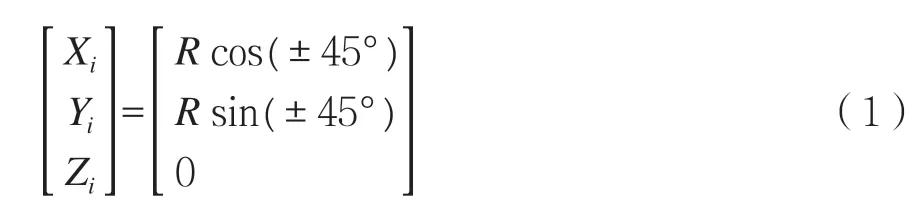
以静平台中心为圆心建立坐标系,X、Y轴与4个支链的电机安装点成45°布置,则机器人固定平台上4个电机的安装点P位置可以表示为:
主动臂与从动臂连接点A坐标为:

式中:qi为电机转动角度。
B点坐标为:
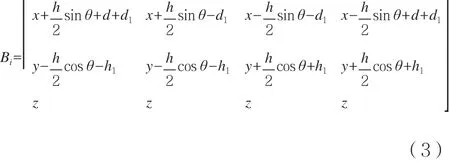
用向量的方式表示从动臂杆长,得到:

设:

则:

对式(5)两边对时间t求导得:

当i=1, 3时为-,当i=2, 4时为+。其中:

得到四自由度并联机器人的雅克比矩阵:
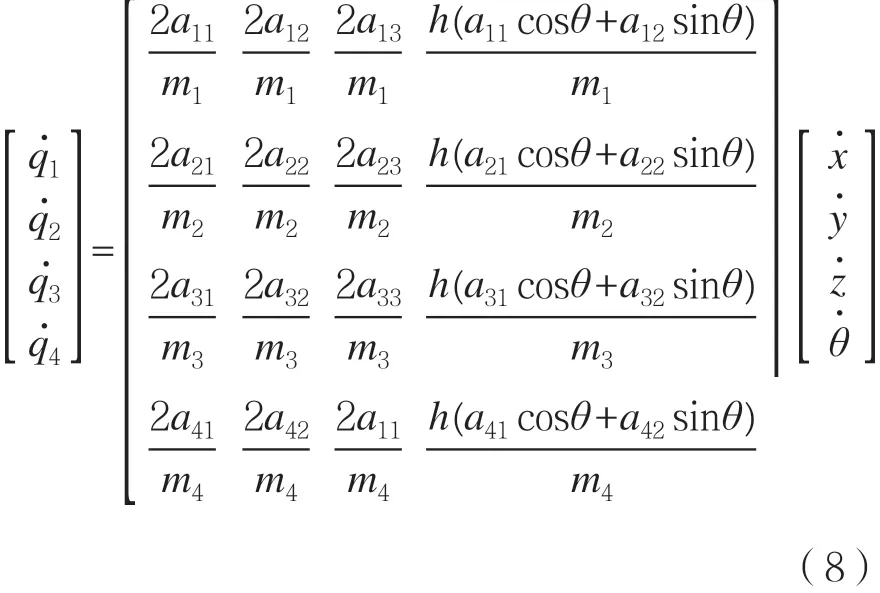
3 运动学仿真
并联机器人的运动轨迹的要求:机器人在开始运动的起始点、拾取点和放置点,动平台运动速度和加速度必须为0,且在中间运行过程中速度与加速度曲线平滑,无尖锐点出现。根据实际使用情况,机器人作业的动作轨迹如图3所示。末端执行器运动流程:从初始点A沿AB线运动到目标物位置点B,拾取目标物,沿AB原路返回到A点,沿AC线到达放置点C,放置完成后,沿AC段原路返回到初始位置点A,至此完成一整个工作流程。末端执行器在拾取和放置目标物的过程中,会伴随有Z轴转动,以适应不同目标物的姿态和目标物放置时的姿态。
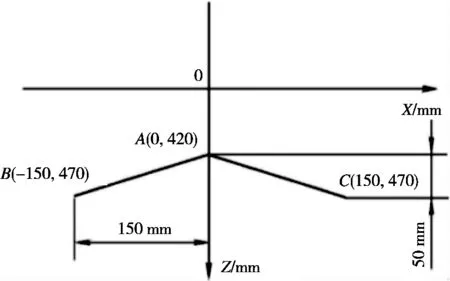
图3 机器人作业的动作轨迹
在Solidworks中建立并联机器人的三维模型,导入ADAMS/view模块中,并将模型中与运动学仿真无关的零件删除或者合并为一个零件,从而使模型得到简化,减少仿真工作量[12-13]。为保证仿真结果准确性,根据设计对各个零件的材料属性进行定义,简化或者合并后的零件要根据实际定义其质量属性,保证仿真模型与实际设计一致,根据各个零件设计要求及其装配关系,以及机器人的实际运动情况添加约束,检查各个零件的属性及它们之间连接和配合,确保模型的正确性[14-15]。
根据运动轨迹,以时间t为变量,添加的各方向的STEP函数:
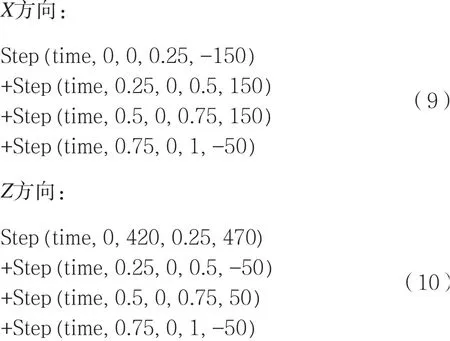
末端执行器的旋转:
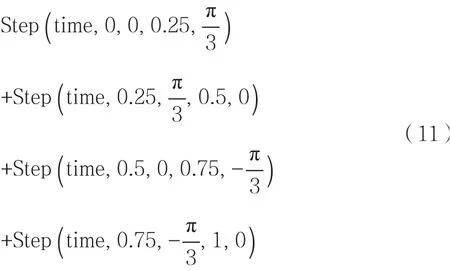
仿真得到并联机器人末端执行器X轴、Z轴和绕Z轴的旋转的坐标曲线,如图4~图6所示。末端执行器在运动过程中坐标变化平稳,曲线光滑,无尖锐点出现,符合对并联机器人运动轨迹的要求,同时也验证运动学理论分析的正确性。
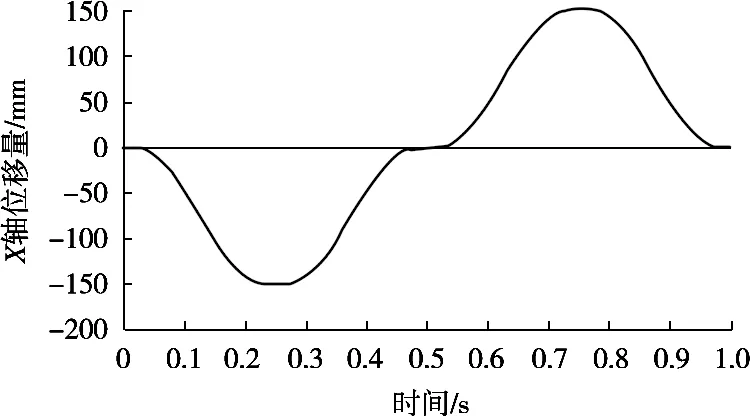
图4 末端执行器X轴坐标变化曲线
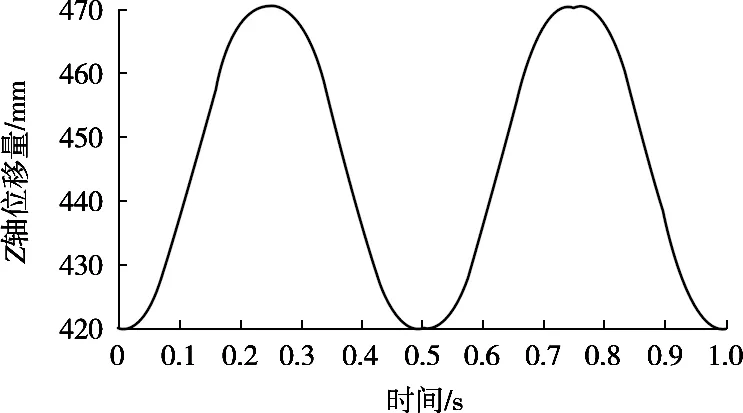
图5 末端执行器Z轴坐标变化曲线
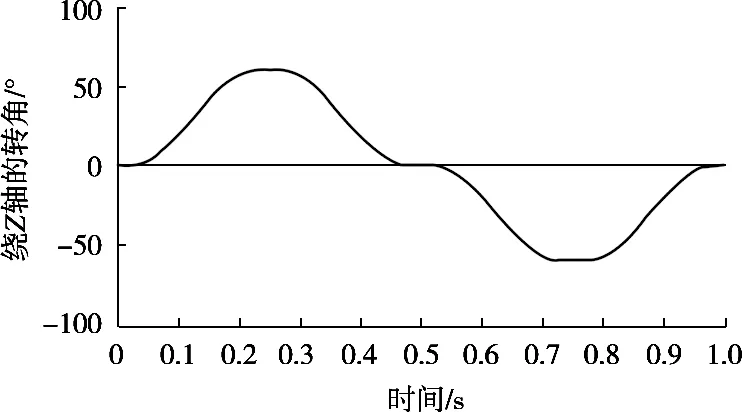
图6 末端执行器绕Z轴的旋转的坐标曲线
并联机器人的末端执行器的X、Z轴以及绕Z轴旋转的速度与加速度曲线如图7~图8所示。曲线每隔0.25 s的变化就有规律性,且在初始点A、目标物位置点B和放置点C的速度与加速度均为0,且在中间运行过程中速度与加速度曲线平滑,运行平稳,无尖锐点出现,符合设计要求,同时也验证运动学理论分析正确性,证明并联机器人具有良好运动学性能,能够实现精确控制,也为机器人轨迹规划提供理论依据。
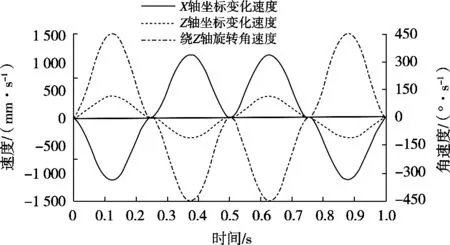
图7 末端执行器速度变化曲线
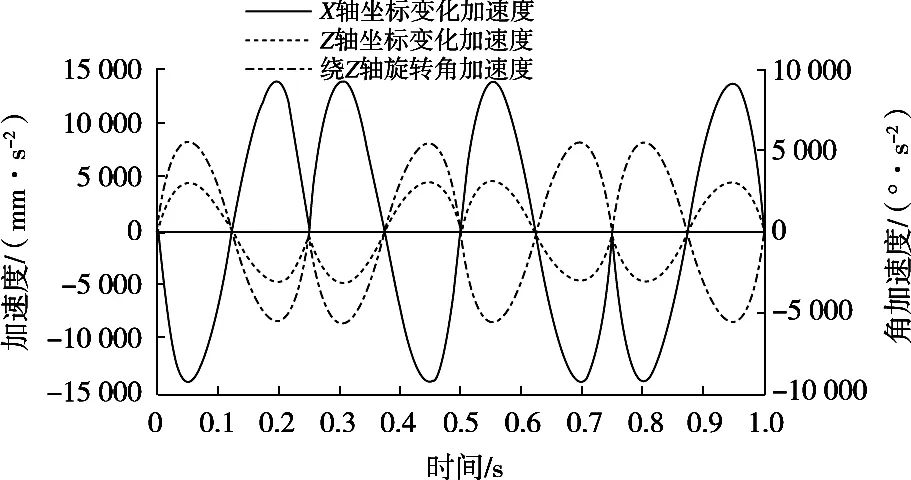
图8 末端执行器加速度变化曲线
4 结论
根据食品装箱工序的作业特点,设计了一台基于食品自动装箱的四自由度并联机器人,主要由驱动部件、静平台、动平台、主动臂、从动臂、执行结构组成。建立运动学模型,得到并联机器人的雅克比矩阵,校核并联机器人的结构设计参数的合理性。并运用ADAMS/view模块对设计的机器人进行运动学仿真分析,得到末端执行器的坐标曲线和速度与加速度的仿真曲线,各个仿真曲线光滑,无尖锐点出现,且在初始点、目标物位置点和放置点的速度与加速度均为0,符合设计要求,同时验证运动学理论分析正确性,证明并联机器人具有良好运动学性能,能够实现精确控制,为机器人轨迹规划提供理论依据,也为自动装箱并联机器人的设计选型提供很好技术支持。
猜你喜欢
科学技术创新(2020年32期)2020-11-05
消费导刊(2020年1期)2020-07-12
测控技术(2018年12期)2018-11-25
金属加工(热加工)(2018年10期)2018-10-26
制造技术与机床(2017年9期)2017-11-27
上海大中型电机(2017年3期)2017-11-13
自动化学报(2016年8期)2016-04-16
自动化学报(2016年5期)2016-04-16
铁道科学与工程学报(2015年5期)2015-12-24
河南科技(2015年2期)2015-02-27
