
基于Himawari-8卫星的自适应阈值火点判识算法适用性分析
2020-05-06 04:52周强陈洁李玉华
海洋气象学报 2020年1期
周强,陈洁,李玉华
(1. 山东省气象服务中心,山东 济南 250031; 2. 国家卫星气象中心,北京 100081)
引言
火灾是威胁公共安全和社会发展的主要灾害之一,尤其是森林草原火灾以其突发性强,蔓延速度快,破坏力较大的特点,往往带来巨大生命财产损失,且林草火多处于偏远地区,人工巡查难以及时发现。快速获取林草火点信息,对火灾的及早应急处置,减少社会经济损失有重要意义[1-3]。
近年来,卫星遥感监测以其成像周期快、覆盖范围广的特点,逐渐成为火灾监测的重要手段[4-8]。数字图像处理领域中,特征点提取反映的是二维图像上亮度变化剧烈的点或图像边缘曲线上曲率极大值的点,在目标识别、图像匹配等领域有着广泛的应用[9-10]。郑伟等[11]综合利用气象卫星数据、环境减灾卫星数据和常规气象观测数据研判火灾发展过程,优化烟雾、云和阴影等影响因素的表现特征,提出了利用多源数据的火点动态监测分析方法。戎志国等[12]通过多源卫星人工火情测量试验,验证中波红外通道有明显的增温效应,气象卫星1 km分辨率的中波红外通道可以监测到200 m2,甚至100 m2燃烧的火场。
极轨卫星受其观测频次低和观测时段固定等因素限制,难以及时提供火情变化信息,而静止气象卫星的连续成像功能以其观测频次高,全天候监测的特点,对火灾的即时监测具有明显优势[13]。武晋雯等[14]分别使用Himawari-8(葵花8号)和高分一号卫星数据,通过前后关联的火点识别算法提取中心燃点温度及燃烧范围,采用近红外光谱、归一化植被指数等方法进行火烧迹地识别。陈洁等[15]利用Himawari-8对内蒙古一次草原火灾监测分析发现,基于自适应阈值火点算法可连续动态监测火情信息,为预测草原火发展提供了重要依据。
自适应阈值火点算法能较好地监测草原火的特征,但在不同下垫面类型区域的适应性需要进一步验证。山东省是林草火灾高发的省份之一,且下垫面环境复杂,单一阈值难以反映不同火情特征。
利用新一代静止气象卫星Himawari-8高时空分辨率的特点,选取2017—2019年山东区域内Himawari-8判定的火点信息和人工核实真实火点资料,分析自适应阈值火点判识算法在山东的火点识别效果,对算法中背景亮温和背景系数的参数进行适应性分析和检验,以提升火点识别算法在山东的目标识别准确率。
1 仪器属性与火点识别
Himawari-8卫星于2015年7月正式投入使用,采用三轴稳定的姿态控制技术,卫星星下点位于赤道上空140.7°E附近,运行高度为35 800 km。主要搭载的AHI(Advanced Himawari Imager)成像仪包含可见光至红外共16个通道,其最高空间分辨率可达500 m,时间分辨率为10 min。Himawari-8卫星通道的高空间分辨率、高观测频次和多通道设置的特点,在无云条件下能够实现24 h连续监测,可为防火救灾工作提供精准及时的火情监测信息支持[16-18]。基于设备属性,建立火点判识流程(图1)。
遥感火点识别主要依据判识燃烧物体热辐射与未发生燃烧时背景辐射的差异,常温地表辐射峰值波长在11 μm左右,而物质燃烧时辐射峰值波长位于4 μm左右[19-22]。自适应阈值火点算法选取AHI成像仪中3.9 μm(第7通道)和11.2 μm(第14通道)红外亮温数据T3.9和T11.2分析燃烧像元。本文火点识别算法中,首先利用普朗克辐射公式将辐亮度L转换为亮度温度T:
(1)
其中,h=6.626×10-34,c为光速,k=1.38×10-23,λ是相应通道波长,单位:μm。
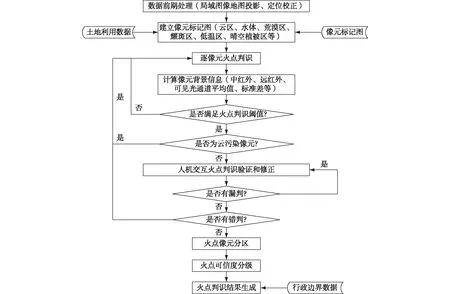
图1 Himawari-8卫星遥感疑似火点判识流程Fig.1 Technological process of recognizing suspected fire spots by Himawari-8 satellite
Himawari-8卫星遥感疑似火点判识流程(图1)主要包括以下步骤。
1)读取火点图像和下垫面土地类型,首先排除水体的镜面反射干扰。当满足R1.6< 0.05 且R0.86< 0.15,R0.86和R1.6分别为Himawari-8在0.86 μm(第4通道)和1.6 μm(第5通道)处的表观反射率,则目标像元被标识为水体。
2)依据判识像元反射率和云判识门槛值作为排除云污染条件。当像元满足以下条件则被判识为云区像元:R0.64+R0.86>0.9且T11.2<265 K。R0.64为0.64 μm(第3通道)处的表观反射率。
3)判断像元太阳相对卫星的方位角如果在165°至200°之间,则该像元处于耀斑区。
4)对无云陆地像元,判别火点绝对阈值条件为:T3.9> 360 K(白天) 或T3.9> 320 K(夜晚)。若探测像元周边邻域内的晴空植被像元满足以下条件,将其作为疑似高温像元:T3.9>(T3.9bg+10)且ΔT3.9_11>(ΔT3.9_11bg+ 8),或T3.9>330 K。式中T3.9bg为背景区像元第7通道亮温,ΔT3.9_11和ΔT3.9_11bg是背景区像元第7通道与14通道亮温差及亮温差平均值。挑选探测像元周边7×7像元邻域内的晴空植被像元和非疑似高温像元作为背景区像元,若背景区晴空植被像元数不足邻域像元数的20%,邻域扩大为9×9,11×11,…,直至19×19像元。若仍不满足条件,放弃该像元的判识处理。
5)最后对比探测像元与背景像元在选取通道下的亮温差异实现火点可信度分级,即:
a)当(T3.9-T3.9bg)≥15 K且(ΔT3.9_11-ΔT3.9_11bg)≥15 K时,为一级确认火点像元;
b)当(T3.9-T3.9bg)<15 K或(ΔT3.9_11-ΔT3.9_11bg)<15 K时,为二级疑似火点像元;
c)满足a)或者b),且火点像元周边相距2个像元以内(包括两个像元)有云区像元时,为三级云区边缘火点像元;
d)当该火点像元周边的8个像元均不是火点像元,且(T3.9-T3.9bg)> 20 K时,为四级噪声火点像元。
2 山东火点特征分析
利用电力等部门乡镇级火灾现场巡查,从2017年3月开始对山东省内Himawari-8卫星反演的疑似火点监测信息进行人工核实反馈,验证反演火点识别效果。选取2017年3月—2019年2月的卫星识别和人工验证数据,逐月对比分析(图2)发现:火点次数有明显的季节变化特征,主要发生时段集中在11月—次年6月;7—9月受汛期降水影响,火点次数显著偏少;6月火点次数最高,验证反馈主要是由麦收季节的农田焚烧秸秆导致。曲线为逐月识别火点准确率,统计时间段内识别火点总数1 311次,监测到真实火点809次,识别准确率为71.5%,验证真实火点准确率较为稳定。
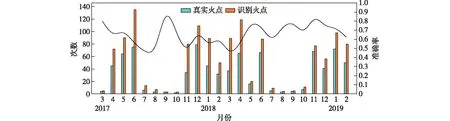
图2 山东省卫星遥感识别火点和真实火点统计分析Fig.2 Statistical analysis of fire spot recognition by satellite remote sensing and real fire spots in Shandong Province
利用山东省30 m分辨率地表覆盖数据对山东省地表类型进行统计分析,同时结合Himawari-8卫星火点数据与地表植被类型数据,采用林分模型[23-24]估算出山东省及周边可燃物载量分布数据,图3a、b分别为山东省下垫面地表类型分布图和可燃物载量分布图。山东省林草覆盖面积构成和空间分布,包括8大类林地和2大类草地,总面积为36 952.1 km2,占全省面积的23.7%。鲁东南、鲁中西部和半岛地区以林地为主,可燃物载量可达20 kg·m-2以上,地势相对较高,鲁中东部和鲁西北以农田和草地为主,可燃物载量在3~20 kg·m-2,海拔较低(图3)。可见山东地区可燃物分布广,下垫面地表类型多样,在复杂地形与下垫面类型的组合下,单一的山火识别阈值难以精确提取全省区域的火点信息。
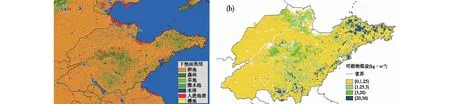
图3 山东省下垫面地表类型分布图(a)和可燃物载量分布图(b)Fig.3 Distribution of types of underlying surface (a) and fuel load (b) in Shandong Province
3 识别算法阈值对比分析
火点识别关键在于判识像元与背景像元的亮温差,识别算法需满足以下两项:
T3.9-T3.9bg>n1 ×S3.9bg
(2)
ΔT3.9_11-ΔT3.9_11bg>n2 ×S3.9_11bg
(3)
其中,背景窗亮温差ΔT3.9_11=T3.9-T11,S3.9bg表示背景窗中3.9 μm亮温的标准差,S3.9_11bg表示背景窗ΔT3.9_11的标准偏差,n1和n2为背景系数。
式(2)和(3)中,T3.9bg,ΔT3.9_11bg是计算相应通道的亮温平均值,方法如下:

(4)
背景亮温随区域、季节以及太阳角度不同而变化,因此区分窗口内不同下垫面类型像元固有亮温值的差异,需要根据本地化的下垫面属性来确定相应阈值系数。
选取2017—2019年山东区域下垫面为林地和草地的火点资料,包括Himawari-8判定的火点资料和人工核实真实火点资料。基于自适应阈值算法,对T3.9bg,ΔT3.9_11bg,n1和n2四个参数分别进行不同阈值大小的敏感性试验。图4给出了四种参数在不同阈值下火点识别准确率的变化序列曲线。总体来看,不同下垫面类型在四个参数试验中识别准确率变化趋势近似一致,但对阈值变化表现敏感。图4a中两种下垫面类型在背景亮温值为350 K时达到最大准确率;背景窗亮温差的准确率变化呈双峰型分布,准确率相对高值区在7.0~7.8 K之间;两种下垫面在背景系数n1试验中区别明显,林地n1取4.0,草地n1为3.5时识别准确率可达70.0%;背景系数n2敏感性相对较弱,n2<3.0时准确率明显偏低,在3.5~5.0之间准确率变化相对稳定。
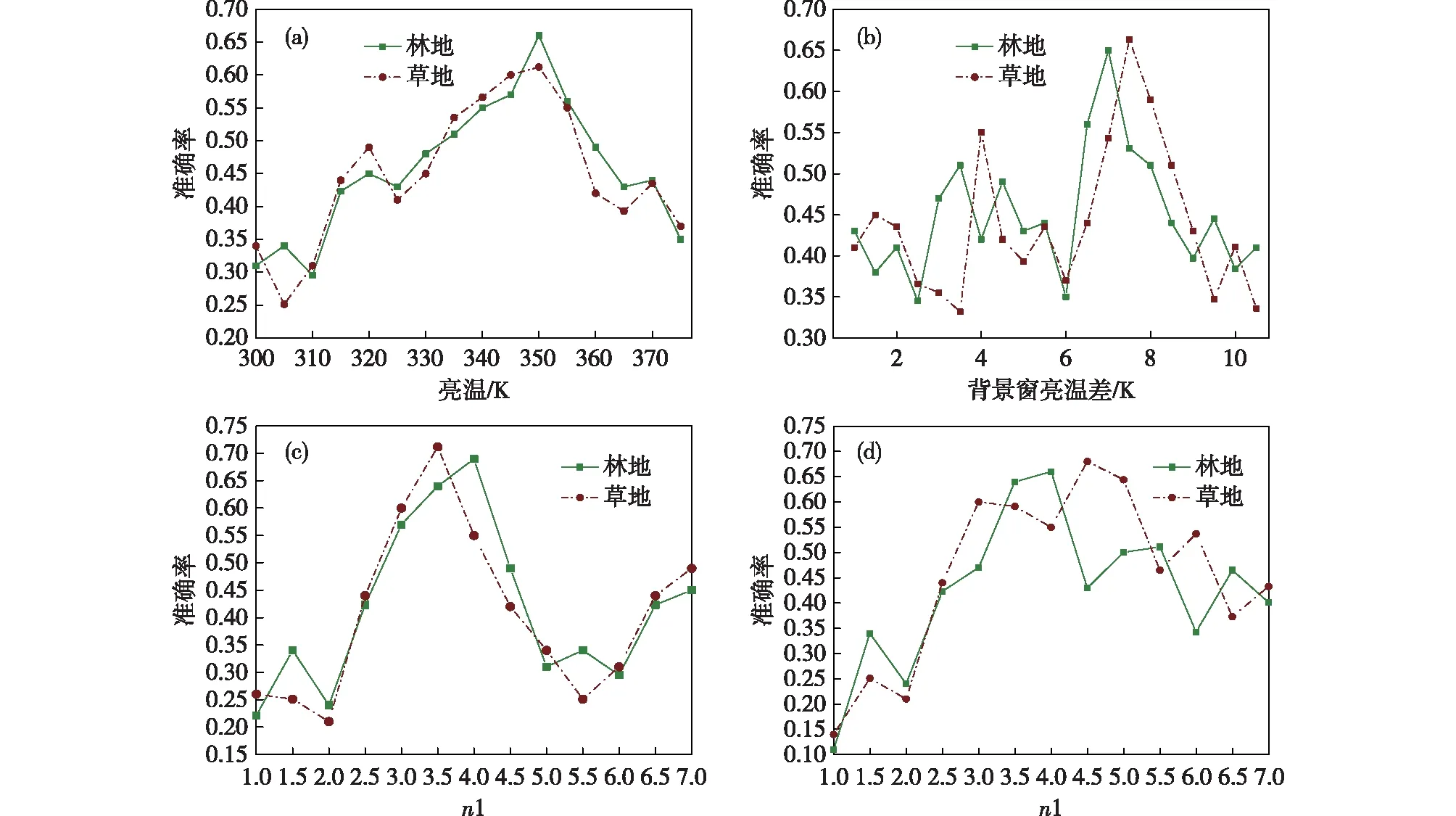
图4 自适应阈值火点算法中四类阈值的敏感性分析(a.背景亮温T3.9bg,b.背景窗亮温差ΔT3.9_11bg,c.背景系数n1,d.背景系数n2)Fig.4 Sensitivity analysis of 4 kinds of threshold in adaptive threshold algorithm (a. brightness temperature of background T3.9bg, b. brightness temperature difference in background window ΔT3.9_11bg, c. background coefficient n1, d. background coefficient n2)
4 算法阈值检验
基于上述敏感性试验结果,分别选取山东区域内四种参数准确率最高的阈值,结果如表1所示。将阈值带入火点识别算法中,对2017年3月—2019年2月近两年内Himawari-8卫星数据重新计算获取火点判识结果。剔除无林火和草原火的月份后,图5给出了阈值干预后火点判识算法和自适应阈值原始算法对山东区域火点判识结果对比。
对比阈值干预后火点判识算法和自适应阈值原始算法对山东区域火点判识结果可以看出,阈值干预算法获取的结果在两种土地类型下的火点识别准确率均有不同程度的提升。其中林地平均准确率72.7%,优于原始算法的66.9%;原始算法的草地火点识别准确率样本均值为77.8%,阈值干预后为81.6%。且两种下垫面类型的火点识别准确率样本均值差ΔVMean草>ΔVMean林,即草地准确率提升高于林地。
表1 阈值识别算法参数选取
Table 1 Parameter selection of threshold recognition algorithm

下垫面类型T3.9bg /KΔT3.9_11bg /Kn1n2林地3507.14.04.5草地3517.53.54.1
以2018年“4·18”济南与泰安交界处火灾为例分析阈值干预算法效果,此次火灾为典型山区林火,火势强且持续时间长。
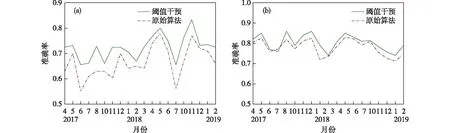
图5 阈值干预火点算法检验分析(a.林地,b.草地)Fig.5 Test and analysis of threshold intervention fire spot algorithm (a. forest land, b. grassland)
选取4月18日20:40整个火灾过程中范围较大的时次,利用原始算法和阈值干预后的算法分别反演该时次火点信息,对比火场实地监测得到图6。分析表明,原始算法火点得到监测信息中包含疑似火点像元20个(图6a),阈值干预后火点反演获取疑似火点像元15个(图6b)。结合实测火点与卫星遥感火点像元的经纬度信息,对比发现两种计算方法得到的火点像元与实测火点的中西部分基本重合,而东部对应区域较少。原始算法在火场的南北两侧存在明显误判像元,阈值干预的火点监测像元相对集中,尤其是对火场南部位于泰安境内的两个火点像元点的判识订正表现较好。阈值干预后的识别算法对火场边缘的像元判识较原始算法有明显提升,能有效减少误判像元数。
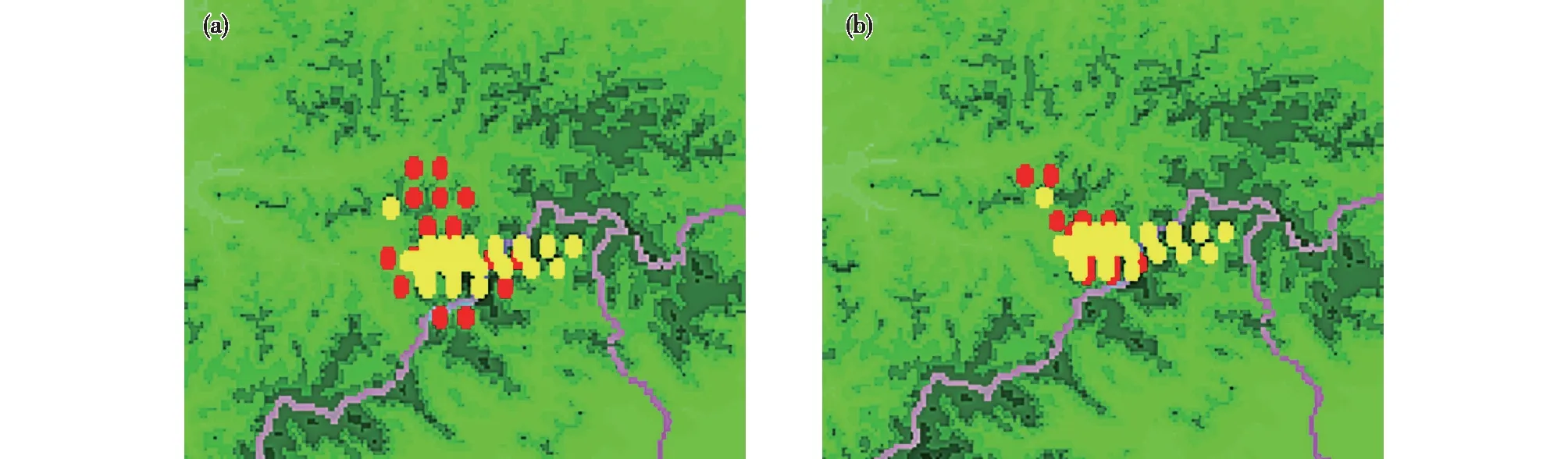
图6 Himawari-8卫星4月18日20:40识别火点(红色)与实测火点(黄色)的对比(a.原始算法,b.阈值干预)Fig.6 Comparison of remote sensing fire spot (red) by Himawari-8 satellite and observed fire spot (yellow) at 20:40 on 18 April 2018 (a. original algorithm, b. threshold intervention)
与原始算法相比,阈值干预算法过滤掉了济泰交界线右侧两个真实火点像元,说明此次阈值的选取和组合同样存在火点判识的漏判,这可能是由于火势强度的区域不均匀,背景窗亮温差存在空间差异,需要结合精细化火场区域温度分布,建立背景亮温与识别参数的相关关系,进一步优化算法阈值以提升目标像元识别准确性。
5 结论
利用Himawari-8卫星监测数据和2017—2019年山东区域火点统计资料,分析自适应阈值火点判识算法在山东的火点识别效果,结合区域下垫面特征对算法中T3.9bg和ΔT3.9_11bg等参数进行适应性分析和阈值干预检验,得到如下结论:
1)基于Himawari-8静止卫星的多通道和高时效等优势,利用下垫面阈值自适应算法能够多时次连续观测山东区域的火情监测信息,可反映出火点次数有明显的季节变化特征,实现火灾信息的及时有效监测。
2)山东省林草覆盖范围广,可燃物载量大,森林草原火灾发生概率较高。火点识别效果对算法中T3.9bg,ΔT3.9_11bg,n1和n2四个参数较为敏感,林草下垫面类型在不同参数阈值时火点识别准确率存在明显差异。根据山东区域复杂下垫面属性来确定背景系数能有效提升火点判识准确度。
3)通过选取敏感性试验最优阈值干预算法,可对林地和草地的火点识别准确率分别提升5.8%和3.8%。阈值干预识别算法能有效过滤误判像元,但两种算法均存在漏判区域,结合火强区域分布和变化进一步优化调整阈值,可为防火工作提供精准决策依据。
猜你喜欢
水资源开发与管理(2022年2期)2022-03-12
建材发展导向(2021年19期)2021-12-06
矿产勘查(2021年8期)2021-11-08
暖通空调(2021年1期)2021-03-16
红外技术(2021年1期)2021-01-29
苏州市职业大学学报(2020年4期)2020-12-31
临床骨科杂志(2020年1期)2020-12-12
山东林业科技(2020年2期)2020-06-08
家庭科学·新健康(2019年10期)2019-11-18
鹿鸣(2018年1期)2018-01-30
