基于专利分析的在轨服务机器人发展研究
2020-05-06 00:57:50王永芳黄剑斌宋洁琼
载人航天 2020年2期
王永芳,黄剑斌,宋洁琼
(1. 中国航天系统科学与工程研究院, 北京100048; 2. 钱学森空间技术实验室, 北京100094)
1 引言
在轨服务机器人主要由基体及搭载在基体上的机械臂和操作末端组成,可以在太空中完成各种自主操作任务,在军用和民用领域均有迫切的研究需求和广阔的应用前景[1]。 近年来,人工智能、机器人等新兴技术飞速发展,为在轨服务机器人提供了良好的研究基础[2]。 美国、欧洲、加拿大等国家或地区均开展了相应的在轨服务机器人研制项目和发展计划。 在各国的技术发展过程中,针对关键技术的攻关与创新,涌现出许多专利,在核心技术分布和地域部署上均形成了专利体系化布局。
在全球高新技术爆炸式发展、专利申请激增的形势下,挖掘利用海量专利信息成为掌握技术发展动态、洞察技术发展方向和促进技术进步的重要方式[3],但目前尚未用于在轨服务机器人领域。 为此,本文基于德温特世界专利索引数据库(Derwent World Patents Index,DWPI),以空间机械臂、操作末端、在轨自主操作为关键技术,对在轨服务机器人技术进行全球专利检索,从时间、地域、技术、申请人等多角度对专利数据进行剖析,全面了解在轨服务机器人技术的发展过程、技术研究热点,用以帮助国内创新主体了解竞争对手情况。
2 技术发展趋势分析
截止检索日(2018 年7 月20 日),全球公开的在轨服务机器人相关专利申请共1151 项。 对上述相关专利利用时序分析方法,研究专利申请量随时间逐年变化情况,结果如图1 所示。 可见,在轨服务机器人技术的专利申请最早出现在20世纪70 年代,发展趋势可以划分为萌芽期(1973—1983 年)、发展期(1984—2007 年)和快速发展期(2008 年至今)。

图1 在轨服务机器人全球专利申请趋势Fig.1 Globe patent application trends of on-orbit servicing robot technology
2.1 萌芽期
在萌芽期(1973—1983 年),在轨服务机器人的专利申请量较少,年均申请量仅有7 项。 该阶段的专利申请主要来自于美国和加拿大,主要涉及航天器模块更换操作。 例如,1976 年加拿大Spar 公司申请了专利CA1049586A1,涉及航天器模块更换系统,主要采用可旋转和可移动的机械手对在轨卫星进行维护,实现航天器之间的模块交换。 之后,美国通用公司在1978—1984 申请了4 项与在轨模块更换与装配相关的专利申请,专利US4308699 A 公开了一种用于构造大型空间结构和自动装配、维护和修理系统;专利US4298178 A 涉及无人维护的航天器,用于对地球静止轨道卫星进行损坏模块更换;专利US4657211 A 用于航天飞机对在轨航天器进行有效载荷模块维修或更换,其采用远程操作机械臂实现卫星捕获与固定;专利US4964596 A 用于在航天飞机轨道上进行装配和维护工作的空间飞行器,使用遥控臂、对接耦合装置、动力模块和通信总线模块等。
2.2 发展期
在发展期(1984—2007 年),在轨服务机器人技术的专利申请量开始呈现逐年上升趋势,年申请量在6~38 项,年均申请量达到17 项。
在该时期内,美国、德国、加拿大、日本均开展了自主在轨服务相关项目。 其中,美国从20 世纪80 年代开始开展空间在轨服务项目,包括空间在轨服务机器人FTS、DART 计划、XSS 计划、OE 计划等;德国从1986 年开始启动ROTEX 空间在轨服务机器人项目,之后相继开展了ESS 计划、ROKVISS 机械臂项目、TECSAS 项目等;加拿大SPAR 公司[4]相继研制开发了航天飞机遥机械臂系统(SRMS)、空间站遥操作机械臂系统(SSRMS)和灵巧机械臂(SPDM);日本在1997 年开展了第一个空间机器人臂飞行试验,而且日本宇宙航空研发机构研制的机器人ETS-VII 开始为国际空间站服务;欧空局从1999 年开始实施ERA项目[5]。
上述国外在轨服务机器人研制项目的开展逐步推动了该技术领域的专利申请量逐步上升,主要涉及空间机械臂、操作末端和自主在轨模块更换与装配技术。
2.3 快速发展期
在快速发展期(2008—2018 年),在轨服务机器人技术的专利申请量呈现快速上升趋势,年专利申请量在32 ~138 项,年均专利申请量达到了64 项。
在该阶段,美国、德国、日本、加拿大和欧空局的相关项目开始进入飞行试验验证阶段[6],并开启了与空间目标近距离检测、非合作目标逼近与抓捕、在轨飞行器维修与在轨重构、空间在轨加注等技术相关的在轨服务项目。 随着这些项目的开展,在轨服务机器人技术的专利申请快速增多。
该阶段的专利申请主要涉及操作末端技术、空间目标捕获与跟踪技术和空间碎片清理技术等。 另外,该阶段的中国专利申请量也开始呈现快速上升趋势。
3 技术优势国家或地区分析
通过各国的专利申请量统计(图2),了解各国家或地区间的技术实力和创新特点。
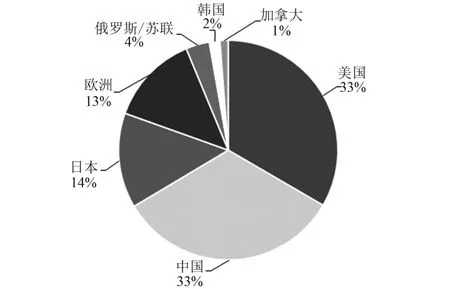
图2 全球专利区域分布分析Fig.2 National distribution of globe patents
在轨服务机器人的专利申请主要来自于美国、中国、日本和欧洲。
3.1 美国
美国的专利申请量排名第一,共有384 项。美国从20 世纪80 年代初开始陆续开展了多个空间在轨服务机器人项目,目前已经对各种类型的在轨服务机器人进行了在轨飞行验证[7-8],其技术发展特点在于广泛集合了多方的国际合作。 加拿大MDA 公司、加拿大航天局、Astrium 公司和日本科学技术振兴机构等均参与过美国的在轨服务机器人相关研制项目,并在美国申请了相关专利,这种国际技术合作大大促进了美国在轨服务机器人技术的快速发展,促使其专利申请量和技术实力始终处于国际领先地位。
在空间机械臂技术领域,美国的专利技术创新侧重于空间冗余构型设计和自主操作技术;在操作末端技术领域,美国则主要侧重于空间仿人灵巧手和空间目标对接技术方面的创新与突破;在自主操作技术领域,美国在自主在轨加注、在轨模块更换与装配和空间碎片清理方面的专利申请量均较高。
3.2 中国
中国的专利申请量排名第二,共有381 项。近些年,中国在空间站组建、舱外活动与试验、在轨卫星维护方面,对在轨服务机器人的需求日益上升,促进了国内技术研发速度,在机械臂、操作末端和自主在轨操作技术方面取得了不少技术突破,虽然与国外还存在一定技术差距,但在技术创新成果数量上已呈现出较快的发展势头。
中国空间机械臂的技术创新侧重于轨迹规划和机械臂冗余构型设计,并在机械臂地面测试、驱动和锁定装置等方面申请了专利。 在操作末端技术领域,中国侧重于空间目标对接结构方面的技术改进。 但是,在自主操作技术领域,中国相对美国技术差距较大,技术创新主要以高校的总体技术方案设计为主。
3.3 日本
日本的专利申请量排名第三,共有162 项。日本不仅具有本国的在轨服务机器人研制项目,还参与了美国相关项目的研制。 近些年,基于在轨服务机器人的军民两用效益,日本在民用技术试验验证的名义下不断助力其军事航天能力的发展。 在自主操作技术领域,日本以空间碎片清理技术创新为主,IHI 公司和Sstroscale 公司还参与了NASA 的技术转移合作研发项目,技术方案侧重于鱼叉绳系机器人和电磁吸附抓捕。
3.4 欧洲
欧洲的专利申请量排名第四,共有153 项,主要来自于德国、法国、英国,具体包括德国专利83项、法国专利27 项、英国专利17 项以及26 项欧洲专利局申请。 其中,德国的专利申请主要来自于欧洲宇航防务集团和德国宇航中心,部分德国高校也参与了相关项目研制和技术创新,如德国亚琛工业大学、柏林大学等。
欧洲专利的研究热点集中在操作末端技术领域,侧重于操作末端精细化操作以及空间目标对接方面的技术改进。 另外,在自主操作技术领域,欧洲专利主要涉及在轨模块更换与装配和空间碎片清理技术的创新,与之有关的国家研制计划包括德国的IBOSS 模块化航天器研制计划[9]、欧洲的E.Deorbit 任务和“空间碎片清除”演示验证任务。
另外,加拿大的在轨服务机器人研制技术相对领先,但由于其主要创新主体参与了美国和欧洲的空间在轨服务项目研制,因此部分技术创新成果优先在美国或欧洲申请专利,造成本国申请量相对较少。
4 技术创新单位分析
排名前26 位申请人的专利申请量统计如图3 所示。
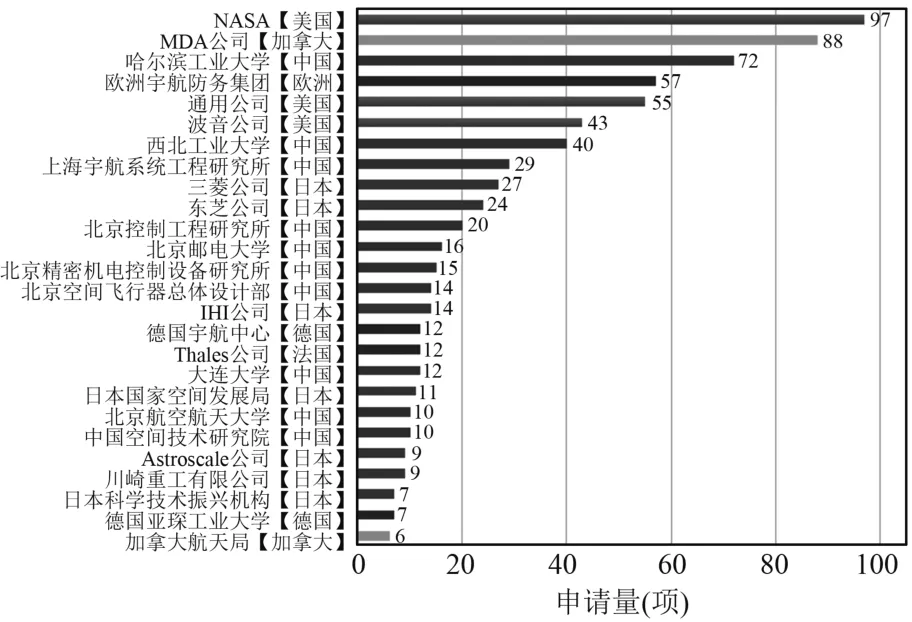
图3 全球专利申请人排名Fig.3 Ranking of global patent applicants
NASA 在在轨服务机器人领域的专利申请量排名第一,有97 项相关专利申请,主要涉及空间机械臂和操作末端技术。 NASA 作为美国在轨服务研制计划的主要负责单位[7-8],先后发起了DART 计划、机器人航天员、机器人燃料加注任务等项目,并与DARPA 联合管理轨道快车项目。另外,NASA 还资助中小企业参与在轨服务技术创新计划,并在全球申请布局了较多专利。
MDA 公司是加拿大主要的技术创新主体,专利申请量排名第二,有88 项相关专利申请。MDA 公司基于其先进的空间机器人技术,已成为美国空间飞行器自主在轨服务与维护项目的主要研制方之一,参与了美国的“轨道快车”计划、“凤凰”计划和“蜻蜓”项目,研制了可以在GEO上开展在轨加注任务的空间基础设施服务(SIS)航天器。 从其专利技术方案分析情况来看,其在2007—2011 年期间申请了28 项自主加注技术相关专利,具体涉及卫星燃料加注系统、控制工具、推进剂转移等技术方面,对中国自主在轨加注、空间目标对接等方面的技术改进具有较大的技术借鉴价值。
哈尔滨工业大学作为我国在轨服务机器人的主要创新主体,在2008—2017 年共申请了72 项相关专利。 从我国的十五计划(2001—2005 年)开始,哈尔滨工业大学机器人技术与系统国家重点实验室面向机械手在空间维修维护中的潜在应用,开展了灵巧手、机械臂、柔顺控制、人机协同及遥操作等前沿方向的创新性研究,实现了人机协同操作中安全性、灵巧性、交互性等关键技术的突破。 2016 年,哈尔滨工业大学研制的空间机械手成功完成了天宫二号人机协同在轨维修科学试验,展示了该校在空间飞行器自主在轨服务与维护技术领域的技术先进性。 与上述研究团队的研制情况相对应,本文共检索获得了20 多项刘宏教授、刘伊威教授的专利,主要涉及空间大型机械臂及末端执行器、大容差柔性捕获机构、轨迹规划方法、交会对接和轨道工作更换器。
欧洲宇航防务集团是世界上第二大航空航天公司,其在轨服务机器人技术专利申请量排名第四,在1980—2012 年申请了57 项相关专利,这些专利申请大多来自于其控股的Astrium 公司和空中客车公司,主要涉及操作末端和空间碎片清理技术。
通用公司在轨服务机器人的专利主要涉及空间机械臂技术和自主操作技术。 2010 年,通用汽车公司与约翰逊航天中心机器人系统技术部联合开发了机器人航天员2(Robonaut2),可与人协同工作,用于代替航天员进行舱外作业以及从事其他太空研究和探索工作。 在NASA 资助合同SAA-AT-07-003 下,NASA 和通用公司在2008—2015 年联合申请了42 项与Robonaut2 相关的专利。
波音公司在1986—2016 年期间申请了43 项相关专利,主要涉及操作末端和自主在轨操作技术。 波音公司作为美国国防高级研究计划局(DARPA)“轨道快车”计划的主要承研单位,提供了作为维修卫星的“自主空间传送机器人轨道器”(Autonomous Space Transport Ro-botic Orbiter,ASTRO),并进行了在轨卫星自动服务演示。 在“轨道快车”计划中,波音公司在2000—2006 年申请了20 多项相关专利,主要涉及在轨加注技术和空间目标捕获与跟踪技术中的多卫星与服务飞行器对接技术、推进剂转移技术、在轨服务飞行器系统等。
西北工业大学的专利申请量排名第七,有40项相关专利,主要涉及机械臂和空间目标捕获与跟踪技术。 近些年,西北工业大学在自主在轨服务技术领域取得了较多技术突破,申请了多项空间绳系机器人相关专利,可以用于抓捕非合作目标或挠性目标卫星。
三菱公司和东芝公司作为日本的主要创新主体,分别以27 项和24 项的相关专利申请量排名第九和第十。 同时,同为日本重要航天研制单位的IHI 公司和Astroscale 公司虽然排名稍显靠后,但在空间碎片清理技术方面是日本的主要创新主体。 德国宇航中心作为欧洲的另一个主要创新主体,有12 项相关专利。
上海宇航系统工程研究所、北京控制工程研究所、北京精密机电控制设备研究所和北京空间飞行器总体设计部等作为中国航天科技集团的研究所,近些年在自主在轨服务技术领域取得了较大技术突破,共申请了88 项相关专利。 另外,由于中国航天科研院所研究项目的涉密程度较高,还有部分技术创新采用了国防专利形式进行权利保护。
5 国外重点项目专利分析
5.1 第二代机器人航天员(Robonaut2)
NASA 于1999 年推出了机器人航天员(Robonaut),在此基础上,约翰逊航天中心(JSC)与通用汽车公司合作联合研制的第二代机器人航天员(Robonaut2),并于2011 年进入国际空间站,成为空间类人机器人发展的里程碑。 Robonaut2 的研制目的是与人协同工作,代替航天员进行舱外作业以及从事其他太空研究和探索[10]。
针对Roubonaut2 的研制,NASA 与通用汽车公司签订了资助合同,合同号为SAA-AT-07-003。在该资助合同下,NASA 和通用汽车公司在2008—2015 年联合申请了42 项与第二代机器人宇航员Robonaut2 相关的专利,如表1 所示。
Roubonaut2 的相关专利主要布局在美国、日本和德国。 其中,Roubonaut2 在美国、日本、德国的专利布局起始时间早且持续性好,布局专利技术方案涉及Robonaut2 的所有技术创新。 另外,Roubonaut2 的部分专利选择在中国、加拿大和澳大利亚对进行了布局,涉及的技术主要包括整体结构、任务规划、灵巧操作控制和驱动,这些技术可以在工业技术领域进行技术转移,具有较大的商业推广应用价值。

表1 第二代航天员相关专利Table 1 Related patents of Robonaut2
5.2 MDA 公司自主加注服务航天器
MDA 公司研制的空间基础设施服务(SIS)航天器可以在GEO 上开展在轨加注任务[11],可以携带推进剂箱到达GEO,并装备了机械臂和工具箱来维护卫星,其工具箱可以打开大部分GEP 卫星的推进剂系统,机械臂可以固定目标卫星,便于加注,也可以用于打开故障太阳能电池翼,并能提供废弃卫星离轨服务。 围绕上述服务航天器的研制,MDA 公司申请了一系列专利对其关键技术进行权利保护。 本文筛选了6 项代表MDA 公司自主加注服务航天器核心技术的专利,如表2 所示。

表2 MDA 公司自主加注技术的核心专利Table 2 Core patents of MDA company in autonomous on-orbit refueling
5.3 其他重要项目
美国、加拿大、欧洲和日本的在轨服务机器人技术处于世界领先水平,其重点研制项目的专利技术方案具有较大的分析应用价值。
5.3.1 TALISMAN 机械臂
在2014 年公布的小行星重定向任务(Asteroid Redirect Mission,ARM)中,NASA 采用了一种新颖的肌腱-致动轻型空间机械臂(Tendon-Actuated Lightweight In-Space Manipulator,TALISMAN)
系统[12]。 该机械臂适用于零重力环境和有重力场环境,不仅可以用于ARM 任务中进行行星抓取,而且可以用于在空间精确放置有效载荷以及进行空间装配、维修等任务。 该机械臂专利US9168659B2,结构与传统的臂架/旋转铰链机械臂结构相比,使用具有肌腱控制的关节结构的张力/压缩构件结构来实现高结构效率,可以实现长距离高性能有效载荷操作。
5.3.2 SARAH 机械手
自适应机器人辅助手(Self-Adapting Robotic Hand,SARAH)是专为国际空间站灵巧机械臂SPDM 开发的操作机械手[13],以支持SPDM 在国际空间站上完成越来越复杂的灵巧操作。
SARAH 机械手的核心方案涉及机械手指、末端驱动与致动技术,加拿大拉瓦尔大学针对上述核心技术申请了专利,具体包括专利US5762390、US6669257 和 US6505870B1。 其 中, 专 利US5762390 公开了SARAH 机械手指的技术方案;专利US6669257 公开了SARAH 由SPDM 操作末端驱动时的电力切换机构方案; 专利US6505870B1 公开了为加拿大航天局CSA 开发的SARAH 的致动系统方案。
5.3.3 “蜻蜓”在轨卫星组装项目
DARPA 资助的“蜻蜓”项目,应用目标包括军用和民用,其项目概念在于利用处于“有效贮藏”状态的卫星进行在轨自组装,关键点为大型射频天线反射器的安装与重构[6]。 “蜻蜓”在轨卫星组装项目的相关专利为劳拉空间系统公司在2015 年申请的专利US20160264264A1,主要涉及通信卫星发射配置以及在轨装配技术改进。
5.3.4 “蜘蛛制造”空间制造系统
2015 年4 月,美国系绳无限公司研制了一种被称为“蜘蛛制造”的空间制造系统,该系统利用蜘蛛状机器人在轨进行大型空间结构集成,能够在轨建造大型天线、航天器桁架和太阳电池帆板[6]。 另外,2017 年6 月,美国DARPA 授予绳系无限公司合同,开始研发“太空制造与装配机器人(OrbWeaver)”[7]。 OrbWeaver 是一种太空制造设备,可以通过增材制造技术制造天线反射器,并通过机器人将其同射频的系统装配成一个小型通信卫星,旨在通过OrbWeaver 系统,基于太空回收、制造、机器人装配技术,在轨构建小型高吞吐量通信卫星。
涉及上述两个在轨制造项目的核心专利,分别为WO2017123677A1 和US20160067919。 其中,专利WO2017123677A1 公开了在轨制造天线的技术方案;专利US20160067919 公开了在轨制造桁架结构的系统和方法,该专利由DARPA 资助,资助合同号为HR0011-11-C-0107。 上述两个专利的发明人Hoyt Robert 是“蜘蛛制造”空间制造系统的技术负责人。
5.3.5 IBOSS 在轨服务与组装项目
2010 年德国宇航局提出了IBOSS 项目(IBOSS building blocks,iBLOCK),对航天器的结构模块化设计展开研究[14]。
IBOSS 主要采用标准化模块(iBLOCK,IBOSS building blocks)、智能空间系统接口(ISSI),形成可在轨组装和维修的航天器系统,提高了在轨航天器的可维护性、可升级性和可重新装配性。 该项目的研究团队主要包括柏林工业大学航空航天研究所、卡尔斯鲁厄计算机科学研究中心、亚琛工业大学结构力学与轻量化设计研究所和RIF 研究与转移研究所。 从专利申请情况来看,仅有亚琛大学申请了与智能空间系统接口(iSSI)相关的专利US20170015443A1,公开了一种构造模块化结构航天器的阴阳耦接装置,用于航天器模块间的耦接操作。
5.3.6 欧洲空间碎片清理任务
欧洲近些年启动的空间碎片清理任务主要包括E.Deorbit 任务和“空间碎片清除”演示验证任务[15]。
E.Deorbit 演示验证航天器将在2023 年执行首次主动碎片清除任务,该项目正在研究2 种捕获技术。 一种技术是配备夹持器的机械臂,可抓捕航天器上的附件。 另一种技术是太空渔网,该装置将在投放后包裹住空间碎片,一旦空间碎片被勾住或被包裹住,E.Deorbit 航天器将利用自身推进器降低空间碎片的轨迹,并使其在大气层中销毁。
另外,欧洲的“空间碎片清除”演示验证任务将使用“太空渔网”、“鱼叉”和阻力帆装置,使2颗试验性立方体卫星从高度为400 km 的轨道脱离。
针对上述2 个欧洲空间碎片清理任务,检索获得了4 项相关专利,分别为欧洲防务集团的专利US20150151856A1、EP3015369A1、US9022323B2 和US7168660B2。 其 中,专 利US20150151856A1 和EP3015369A1 是EADS 控股的空客公司申请,主要涉及鱼叉空间碎片捕获或拦截技术;另2 个专利US9022323B2 和US7168660B2 主要涉及太空渔网清理空间碎片技术。
5.3.7 日本空间碎片清除计划
日本是最早开展空间碎片清理技术研究的国家之一,早在1991 年日本就申请了相关专利,主要涉及用于打捞不再运作的失效飞船的空间航天器系统,以保持空间环境清洁。
从20 世纪开始,日本针对空间碎片清理相继提出了绳系收集和电磁吸附离轨的技术方案。 例如,日本川崎重工的专利JP03809524B2,涉及用于收集废弃空间碎片的系绳装置,其在捕获机构和系绳机构之间提供动力和交换操作信息信号;而该公司的专利JP04538591B2 则主要采用电子吸附的方式进行空间碎片清理。
近些年,日本空间碎片清理的技术方案开始呈现多种形式共同发展趋势,日本IHI 公司提出了一种空间碎片清除装置,可以在空间碎片旋转状态下在其上安装减速装置,从而实现碎片离轨操作;之后,日本IHI 公司又申请了鱼叉插取空间碎片的相关专利,通过引导构件调整鱼叉的射击角度,近距离调整角度后发射鱼叉,降低鱼叉偏离误差,避免鱼叉弹射或击碎碎片的问题,从而准确地捕获碎片。 上述技术方案的涉及到的专利包括US9463884B2 和US20170113818A1。
6 小结
1)将中国未来技术发展方向作为专利布局的重点技术领域,弥补中国专利布局空白。
随着中国在轨服务机器人研制计划的推进,针对空间大负载传动技术、灵巧操作工具、空间仿人灵巧手、自主在轨加注的精细操作和安全控制,具有较大技术研究需求;从中国专利的技术分布情况来看,目前中国在上述技术领域内的创新量较低,是未来需要加大自主创新的重要技术领域。
在中国空间机器人研制与技术创新过程中,应将空间大负载传动技术、灵巧操作工具、空间仿人灵巧手、自主在轨加注的精细操作和安全控制等关键技术领域作为中国专利布局的工作重点,一是加强中国自有知识产权的及时有效保护,弥补中国专利布局空白点;二是避免国外专利布局对中国未来核心技术发展构成壁垒,影响技术突破方向的选择。
2)针对具有技术转移和国际合作需求的关键技术领域,在确保国内专利布局优势的同时,积极扩展国外专利布局。
基于在轨服务机器人技术的军民两用特性,部分关键技术具有向民用领域推广的可行性,具体包括冗余构型空间机械臂技术、大负载低自重传动技术、机械臂轨迹规划技术、机械臂遥操作技术、空间目标对接技术、自主在轨加注技术、空间碎片清理技术等。
在上述关键技术领域内,中国具有一定的研究基础和专利布局,但为了适应未来技术转移的市场发展需求,需要加强国内的专利布局全面性,以确保中国技术单位在这些关键技术领域内的国内专利布局优势。 另外,考虑这些技术开发的国际技术合作需求,应该在国内全面布局基础上扩展国外专利布局,并将欧洲和一带一路沿线国家等作为优先考虑区域。
参考文献(References)
[ 1] 林益明, 李大明, 王耀兵, 等. 空间机器人发展现状与思考[J]. 航天器工程, 2015, 24(5): 1-7.
Lin Y M,Li D M,Wang Y B. Current status and analysis of space robot[J]. Spacecraft Engineering, 2015, 24(5): 1-7.(in Chinese)
[ 2] 李岩, 党常平. 空间在轨服务技术进展[J]. 兵工自动化,2012(5): 79-82.
Li Y, Dang C P. Space orbit service technology progress[J].Ordnance Industry Automation, 2012(5): 79-82.(in Chinese)
[ 3] 毛金生, 冯小兵, 陈燕. 专利分析和预警操作实务[M].北京: 清华大学出版社, 2009.
Mao J S, Feng X B, Chen Y. Patent Analysis and early Warning Operating Practices[M]. Beijing: Tsinghua University Press, 2009.(in Chinese)
[ 4] MacDonald Dettwiler Space and Advanced Robotics Ltd.The shuttle remote manipulator system-the canadarm[EB/OL].https:/ /www.ieee.ca/millennium/canadarm/canadarm_technical.html.
[ 5] ESA.The Geostationary Servicing Vehicle (GSV)[EB/OL].https:/ /www.esa.int/Enabling_Support/Space_Engineering_Technology/Automation_and_Robotics/The_Geostationary_Servicing_Vehicle_GSV.
[ 6] NASA.NASA’s Dragonfly project demonstrates robotic satellite assembly critical to future space infrastructure development[EB/OL]. [2017-09-13]. https:/ /www.nasa.gov/mission _ pages/tdm/irma/nasas-dragonfly-project-demonstratesrobotic-satellite-assembly-critical-to-future-space.html.
[ 7] Orbital manufacturing and construction technologies [ EB/OL]. [2017-07-26]. http:/ /www.tethers.com/SpiderFab.html.
[ 8] DARPA.Robotic payload for RSGS mission moves to next phase of development. (RSGS)[EB/OL]. [2018-08-17].https:/ /www.darpa.mil/news-events/2018-08-17.
[ 9] Schervan T, Kortmann M, Schroder K, et al. iBOSS modular plug & play-standardized building block solutions for future space systems enhancing capabilities and flexibility, design,architecture and operations[C]/ /68thInternational Astronautical Congress (IAC), Adelaide, Australia, 2017.
[10] NASA.NASA. Roubonaut2 [EB/OL]. [2013-01-02]. https:/ /www.nasa.gov/mission_pages/station/multimedia/gallery/iss034e013942.html.
[11] SSL.MDA announces on-orbit satellite servicing business formation and contract awards for spacecraft and first life extension customer[EB/OL]. [2017-06-28]. http:/ /sslmda.com/html/pressreleases/pr20170628.php.
[12] Doggett W R,Dorsey J T,Jones T C, et al. Development of a tendon-actuated lightweight in-space manipulator (TALISMAN)[C]/ /42ndAerospace Mechanisms Symposium, Baltimore, MD, United States. NF1676L-17335, 2014.
[13] Rubinger B, Brousseau M, Lymer J, et al. A novel robotic hand-SARAH for operations on the international space station[C]/ /7thESA Workshop on Advanced Space Technologies for Robotics and Automation ‘ASTRA 2002’, 2002: 19-21.
[14] Orbital manufacturing and construction technologies [ EB/OL]. [2017-08-25]. http:/ /www.tethers.com/SpiderFab.html.
[15] iBOSS.The iBOSS concept[EB/OL]. [2018-11-05]. http:/ /www.iboss-satellites.com/iboss/philosophy/.
[16] ESA’s e. Deorbit debris removal mission reborn as servicing vehicle[EB/OL]. [2018-12-21]. https:/ /www.esa.int/Safety_Security/Clean_Space/ESA_s_e.Deorbit_debris_removal_mission_reborn_as_servicing_vehicle.
猜你喜欢
国际太空(2022年7期)2022-08-16 09:52:50
水运工程(2022年7期)2022-07-29 08:37:38
国际太空(2019年9期)2019-10-23 01:55:34
传感器世界(2019年4期)2019-06-26 09:58:44
国际太空(2018年12期)2019-01-28 12:53:20
国际太空(2018年9期)2018-10-18 08:51:32
河南科技(2016年8期)2016-09-03 08:08:22
发明与创新(2016年5期)2016-08-21 13:42:50
化学分析计量(2013年1期)2013-03-11 16:37:15
发明与创新(2013年1期)2013-03-11 15:53:28