基于机电伺服控制的液氧煤油发动机推力调节技术
2020-05-06 00:57:48张晓光董国创
载人航天 2020年2期
张晓光,董国创,陈 晖
(西安航天动力研究所, 西安710100)
1 引言
发动机推力调节是运载火箭提高发射可靠性、优化飞行载荷环境、提升运载能力的必要手段[1]。 航天飞机主发动机SSME、天顶号火箭一级发动机RD-171 M、宇宙神V 火箭一级发动机RD-180、安加拉火箭通用芯级发动机RD-191 等均具备推力调节能力。 中国新一代运载火箭及重型运载火箭均采用补燃循环液氧煤油发动机作为主动力,火箭性能的优化和提升也要求液体发动机具备推力调节能力[1-2]。
早期液体火箭发动机推力调节一般采用电液伺服控制。 SSME 发动机自带控制器控制推力室氧主阀、燃料主阀、冷却控制阀、氢路预燃室氧副阀、氧路预燃室氧副阀5 个电液伺服作动阀门实现发动机起动关机与推力调节[3-4]。RD-171 M/180/191 发动机推力调节器采用7 位数字式电液伺服作动器驱动[5-6]。 电液伺服系统能源供应、驱动控制及作动器均较复杂,使用维护性和可靠性较差。 随着高能量密度伺服电机及其驱动控制技术的发展,机电伺服控制逐步取代电液伺服控制,成为发动机调节控制的发展方向[7-8]。
与电液伺服相比,机电伺服系统简单,能源为电能,与发动机无关,可大幅简化发动机气液系统;机电伺服作动器简单,使用维护简便,可靠性高;位置伺服控制可实现高精度、快响应推力调节;通过调整供电及软件,易于实现拓展应用。Myers 等[9]论证了SSME 发动机改用机电伺服控制的可行性。 Lister 等[10]针对STME 发动机开展了调节元件机电伺服系统方案设计和力热环境适应性仿真分析。 McCormick 等[11]综述了欧洲在上面级发动机用机电伺服作动低温阀领域的研究进展。 Jung 等[12-13]研制了发动机推力调节机电伺服系统原理样机,开展了仿真、冷试和环境试验。 国内未见机电伺服控制技术应用于发动机调节控制的报道。
本文针对补燃循环液氧煤油发动机推力调节需求,开展推力调节机电伺服控制技术研究,包括方案论证、稳动态特性仿真、负载模拟试验、冷调试验、环境试验及发动机热试,解决机电伺服控制技术工程化应用面临的小型轻质、力热环境适应性、可靠性等问题。
2 推力调节机电伺服控制方案
2.1 推力调节原理
图1 为典型补燃循环液氧煤油发动机的气液系统图,在燃气发生器燃料供应路设置推力调节器。 发动机通过调节推力调节器位置,调节燃气发生器燃料流量,改变燃气发生器混合比,改变燃气发生器温度,控制涡轮功率,从而改变推力室推进剂供应流量,实现发动机推力调节。 该推力调节方案可适应的调节范围与燃气发生器能够维持稳定燃烧的最低温度有关,一般可降至额定推力的50%左右[14]。 由于无法直接检测推力调节器流量,一般选择推力调节器位置作为发动机推力调节的控制变量[15]。
2.2 推力调节机电伺服系统
2.2.1 系统组成与工作过程

图1 补燃循环液氧煤油发动机气液系统图Fig.1 Diagram of gas and liquid system of staged combustion LOX/kerosene rocket engine
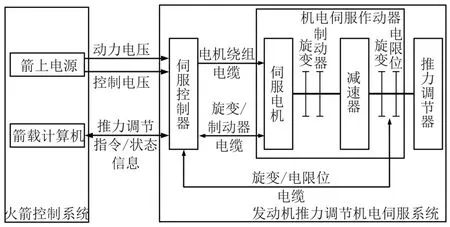
图2 发动机推力调节机电伺服系统Fig.2 Electromechanical thrust control system
图2 为发动机推力调节机电伺服系统,它由推力调节器、机电伺服作动器、伺服控制器等组成。 机电伺服系统与火箭控制系统的接口包括:动力电源供电接口、控制电源供电接口和通讯接口。 箭上电源通过供电电缆向伺服控制器供电;箭载计算机通过数字总线向伺服控制器发送发动机推力调节指令,同时伺服控制器通过数字总线向箭载计算机反馈工作状态信息。
图3 为发动机推力调节机电伺服系统工作过程。 当火箭进行发动机推力调节时,伺服控制器接收箭载计算机发送的推力调节指令,按推力控制式F =f(δ)(由系统参数调整和校准试车得到)将其转化为推力调节器位置指令δcmd,与当前位置反馈δact进行比较,得到误差信号,由位置-速度-电流三闭环级联控制算法处理得到控制量,再经功率放大产生伺服电机的驱动电流,使伺服电机按控制量的大小和极性转动,并通过减速器输出相应的转矩和转速,使推力调节器到达指令位置,实现目标推力调节。
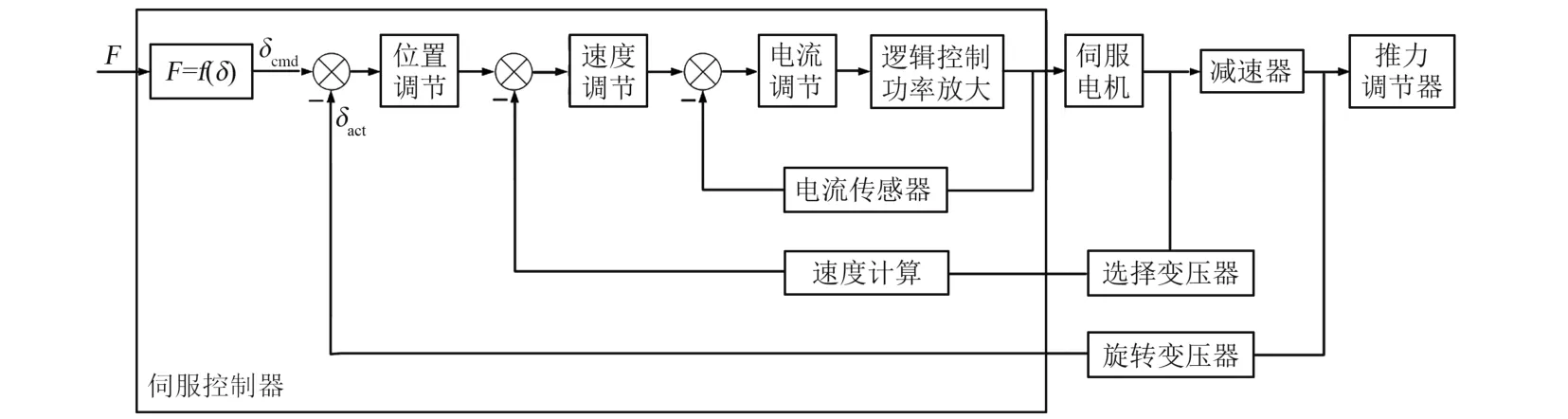
图3 推力调节机电伺服控制模式Fig.3 Electromechanical thrust control mode
2.2.2 机电伺服作动器方案
机电伺服作动器由伺服电机、减速器、旋转变压器、失电制动器、电限位等构成,见图4。
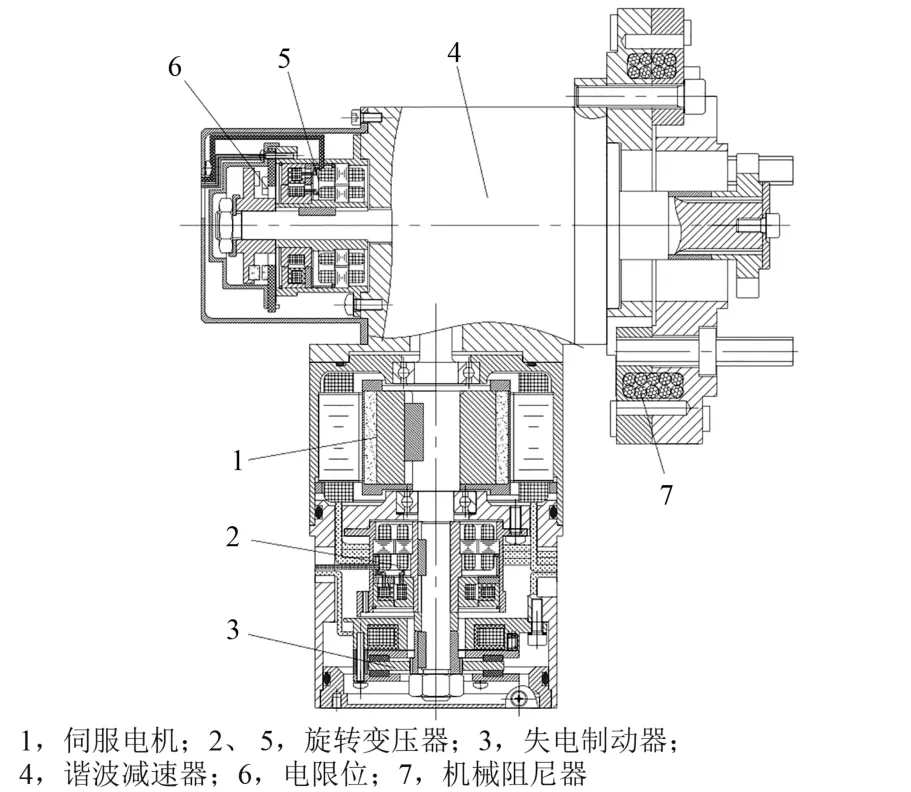
图4 机电伺服作动器Fig.4 Electromechanical actuator
在采用单机电伺服作动器以保证小型轻质的基础上,为提高可靠性,电机采用双绕组设计,通过绕组冗余,使机电伺服作动器在一套绕组发生断路等故障时仍能正常工作。 为提升机电伺服作动器振动冲击环境适应性,其与推力调节器通过机械阻尼器安装对接。
2.2.3 伺服控制器方案
伺服控制器见图5,包括处理机电路、信号调理电路、驱动控制电路、电源电路、母板电路、接口电路和控制软件,主要特点如下。
为满足较宽速率范围内的高精度推力调节需求,伺服电机选用宽速域调速性能优的永磁同步电机,减速器选用承载能力强、传动精度优的谐波减速器。
减速器同轴安装的旋转变压器用于检测推力调节器位置,构成位置闭环;同轴安装的电限位用于保护推力调节器机械限位装置避免受损。
电机同轴安装的旋转变压器用于检测电机位置,构成速度闭环;同轴安装的失电制动器用于推力调节器非工作状态位置锁紧以及伺服系统发生非受控故障时推力调节器制动锁紧。
旋转变压器励磁绕组和输出绕组均采用空间正交设计,使表征转子位置的相位输出与温度无关,保证了在要求环境温度范围内位置检测控制的一致性。
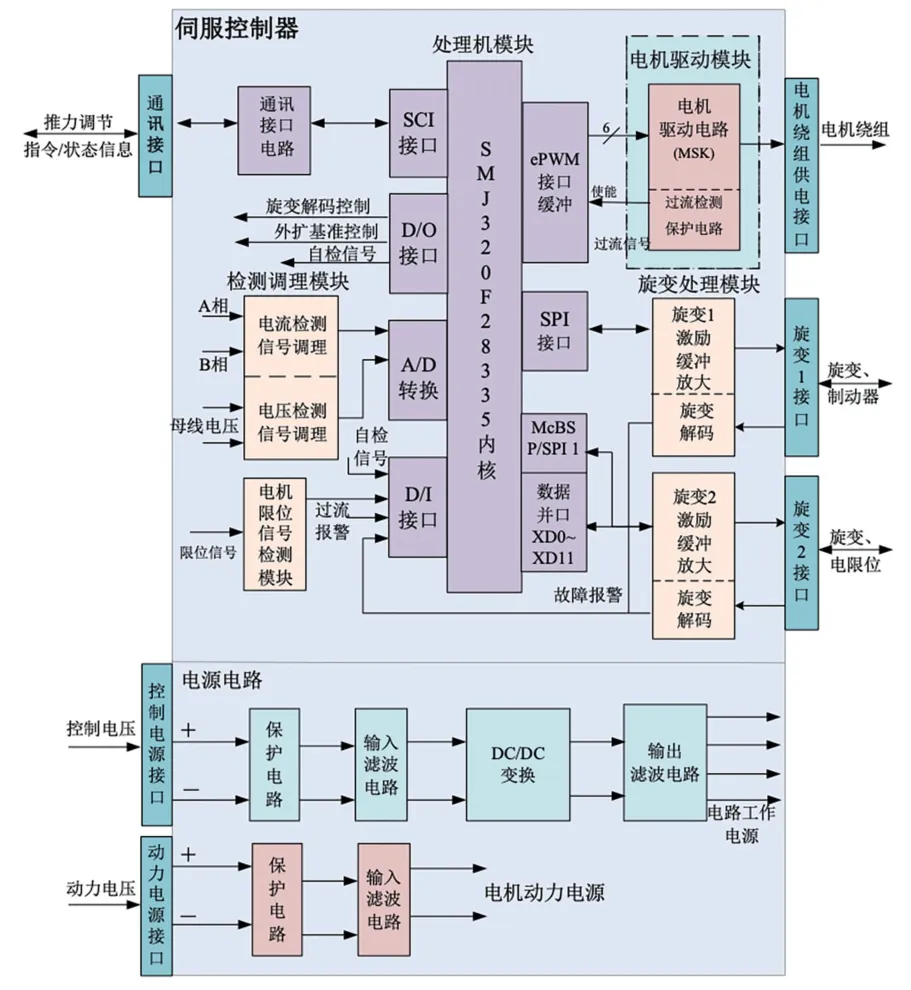
图5 伺服控制器Fig.5 Servo controller
1) 时统/报警接口:无源触点、双点双线。
2) 失电制动器供电及控制:双冗余。
3) 电机、作动器位置检测:冗余解算。
4) 控制律:为实现快响应推力调节,并尽量减小超调,采用分段PID 控制。 位置跟踪误差较大时,高转速跟踪指令位置,减小响应时间;当接近指令位置时,转速逐步下降,避免超调。
5) 自检:自检测、自诊断。
6) 故障保护:软件保护+硬件保护。
2.3 推力调节故障监控方案
2.3.1 伺服系统故障保护方案
伺服系统故障保护方案设计遵循系统功能失效安全原则,保证发生故障时发动机状态向安全方向移动。 故障模式按照其对伺服控制器功能的影响,可分为受控故障与非受控故障2 类,分别采用不同的故障保护方案。
1) 受控故障:指可被伺服系统吸收,对伺服系统工作、发动机推力调节无影响的故障,如电机某一绕组断路或某一旋转变压器故障等。
故障保护方案:由软/硬件设计措施保证故障被伺服系统吸收,伺服系统正常运行。
2) 非受控故障:指可使伺服控制器控制功能失效,仅有测试、通讯功能,伺服系统处于非受控状态,无法完成要求的推力调节任务的故障,包括过流、欠压、IPM 超温、位置超差等。
故障保护方案:伺服控制器一旦监测到非受控故障发生,立即向火箭控制系统发送故障报警信号,并同步关断PWM 波输出、制动电机,使推力调节器停留在当前位置,防止推力调节器流量波动对发动机造成不利影响。
2.3.2 发动机推力调节故障监控方案
采用机电伺服控制后,发动机推力调节采取多参数融合故障监控方案,故障检测参数如下。
1) 伺服控制器自检测和自诊断结果;
2) 发动机热力参数:涡轮转速、泵出口压力、涡轮出口温度等。
3 稳动态特性仿真
推力调节机电伺服系统是典型的永磁同步电动机位置跟踪矢量控制系统。 基于Matlab 软件Simulink 环境,利用动态模块库,建立了推力调节机电伺服系统仿真模型,见图6,包括永磁同步电机本体模型、坐标变换模型、驱动电路模型、位置-速度-电流三闭环控制模型、控制律模型、SVPWM生成模型等。
图7 为推力调节机电伺服系统阶跃、斜坡位置指令响应特性仿真结果。 阶跃响应无超调,同时响应时间和斜坡位置动态跟踪误差能够满足发动机推力调节要求,验证了分段PID 控制律的有效性。
4 试验验证
4.1 负载模拟试验
为充分测试推力调节机电伺服系统的稳动态性能、极限工况适应性、耐久性及可靠性,并降低试验成本,在推力调节器冷调试验或发动机试车前进行负载模拟试验,将复杂的冷热试试验转化为试验室条件下的带载试验,并加严考核。
图8 为电动负载模拟试验系统,由负载电机模拟推力调节器冷热试负载特性,进行了恒定转矩、正弦波转矩、自定义转矩加载等测试,见图9,其中正弦波转矩和自定义转矩为加严考核,试验表明,机电伺服系统满足推力调节器宽负载、宽速域高精度、快响应、高可靠位置调节需求。 指令响应滞后时间约50 ms,阶跃响应无超调,稳态位置跟踪误差优于±0.12°。
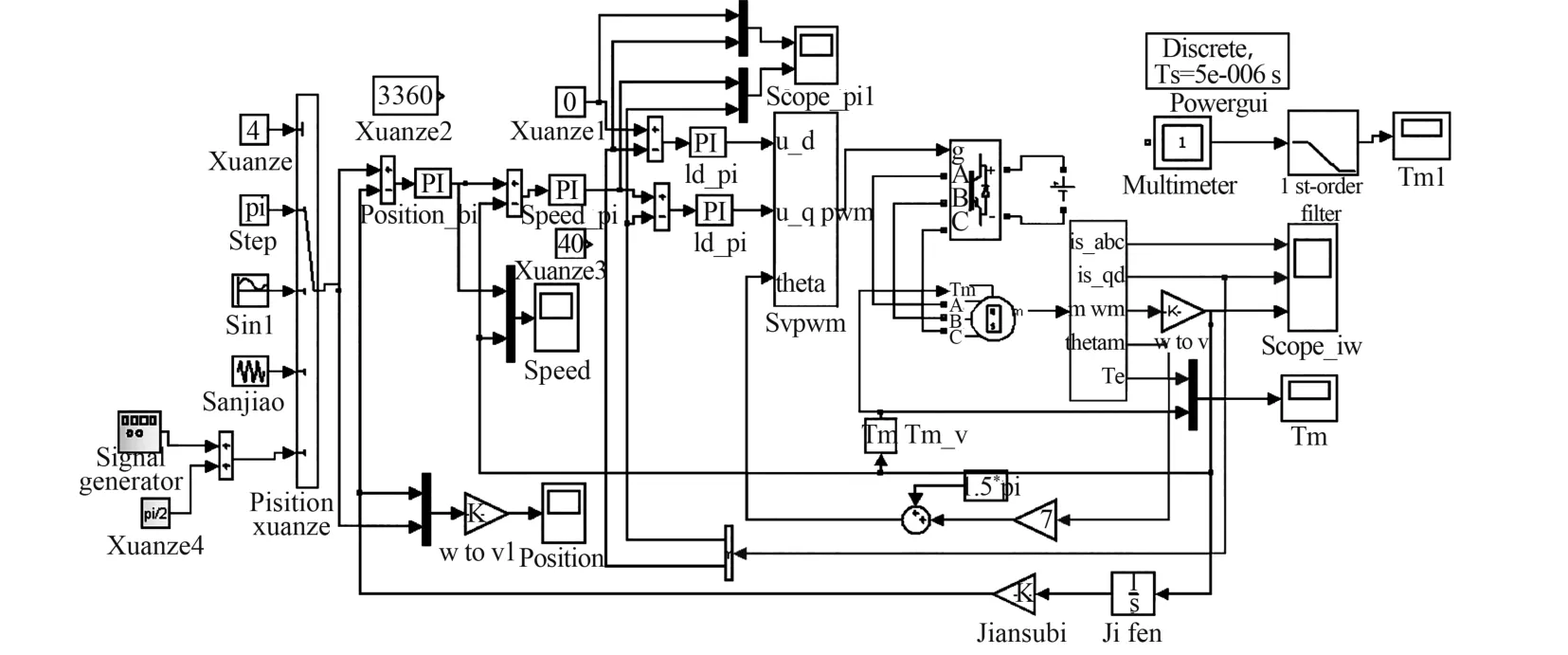
图6 推力调节机电伺服系统仿真模型Fig.6 Simulation model of electromechanical system
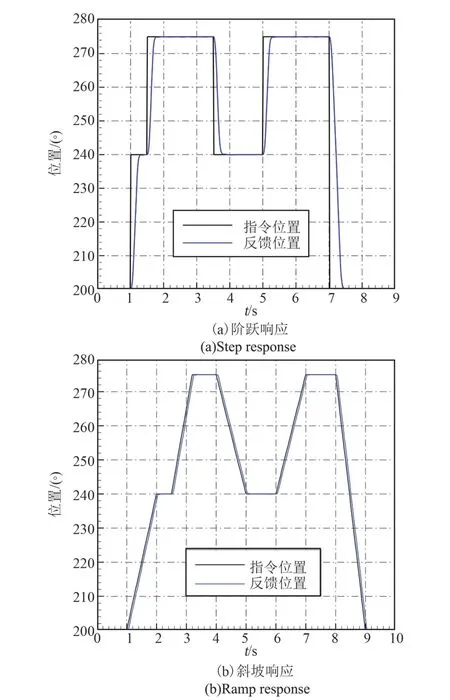
图7 机电伺服系统阶跃、斜坡响应特性仿真曲线Fig.7 Simulation curves of electromechanical system step and ramp response

图8 负载模拟试验Fig.8 Load simulation test
4.2 推力调节器冷调试验

图9 负载模拟试验曲线Fig.9 Curves of load simulation test
推力调节机电伺服系统参加发动机试车前,进行了冷调试验,见图10,利用高压水贮箱模拟发动机燃料二级泵向推力调节器供应高压水,调整出口孔板实现对推力调节器工作压降的模拟。 推力调节器按照发动机起动关机和推力调节时序运动,对其位置和流量调节控制性能进行了测试。 图11 为推力调节器冷调试验典型曲线,试验表明,推力调节器稳态流量控制精度优于±1.5%。
4.3 环境试验
为确保推力调节机电伺服系统对发动机力热环境的适应性,进行了机电伺服系统单机和系统级环境试验,包括高低温、振动冲击(图12)等。其中,伺服系统振动冲击试验包括不通电与通电运行2 种状态,试验条件覆盖发动机安装部位振动冲击量级,试验后结构完整性、功能性能检查正常。
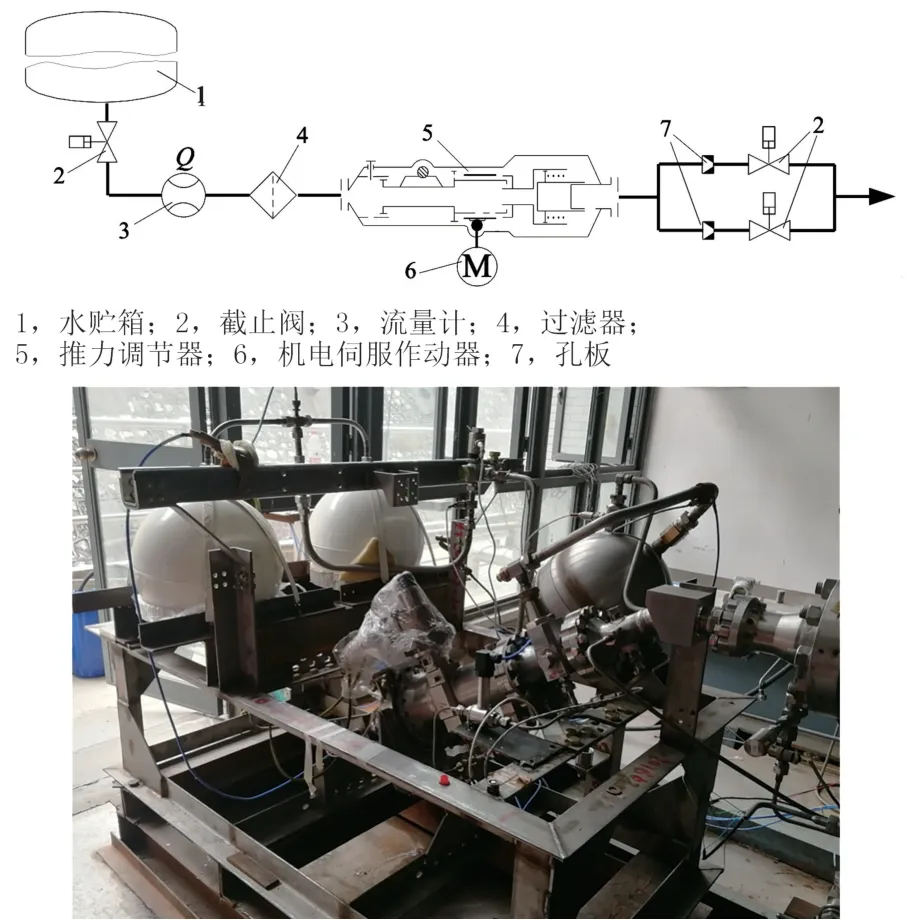
图10 推力调节器冷调试验Fig.10 Cold test of thrust control valve
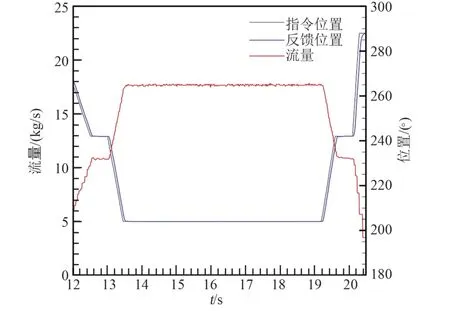
图11 推力调节器位置、流量测试曲线Fig.11 Measured position and flow of thrust control valve

图12 伺服系统振动冲击环境试验Fig.12 Vibration and shock test of electromechanical system
4.4 发动机热试
将研制的推力调节机电伺服系统用于某型补燃循环液氧煤油发动机推力调节,开展了地面热试考核。 图13 为发动机典型热试曲线,其中(a)为无量纲推力(实际推力/额定推力),(b)为推力调节器位置。 推力调节机电伺服系统成功按时序控制发动机完成分级起动、主级工况维持和推力调节,推力调节范围50%~108%。 热试结束后,将机电伺服系统从发动机上分解,再次进行了空载测试和负载模拟试验,功能性能与热试前一致,未受试车影响,验证了其对发动任务剖面和环境剖面的适应性。

图13 发动机热试推力调节曲线Fig.13 Curves of thrust control hot firing test
通过负载模拟试验、推力调节器冷调试验和发动机热试考核,得到了推力调节机电伺服系统的稳动态性能,见表1。 由表1 可见,发动机推力调节精度达到±3%,满足运载火箭要求。
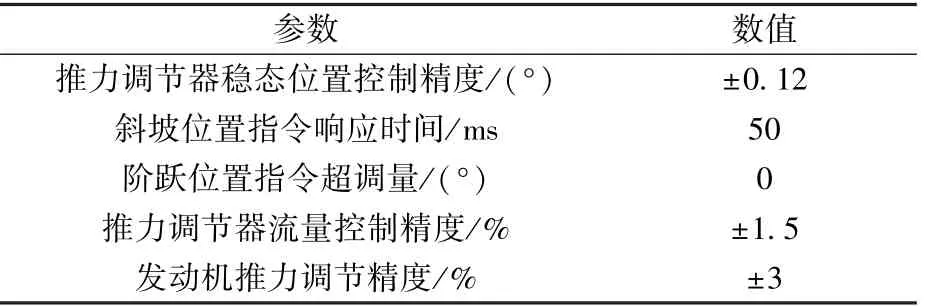
表1 发动机推力调节机电伺服系统性能参数Table 1 Parameters of electromechanical thrust control system
5 结论
1) 选择推力调节器位置作为发动机推力调节控制变量,采用位置-速度-电流三闭环控制模式和分段PID 控制律,兼顾了调节精度、响应时间和无超调的推力调节需求。
2) 采用电机双绕组、失电制动器供电/控制双冗余、电机、作动器位置冗余解算等局部余度方案,提高了机电伺服系统的可靠性,同时对系统体积和重量基本无影响。
3) 机电伺服系统采用系统功能失效安全的故障保护方案,发动机采用融合伺服控制器自检测和自诊断结果、发动机热力参数的故障监控方案,提高了发动机推力调节的可靠性。
4) 通过稳动态特性仿真、负载模拟试验、冷调试验、环境试验和发动机热试,验证了推力调节机电伺服控制方案,发动机推力调节精度满足运载火箭要求。
参考文献(References)
[ 1] 范瑞祥, 郑立伟, 宋 强, 等. 发动机推力调节能力对系列构型运载火箭总体性能影响研究[J]. 载人航天, 2014,20(5): 393-398.
Fan R X, Zheng L W, Song Q, et al. Effects of throat capability on overall performance of launch vehicle series[J].Manned Spaceflight, 2014, 20(5): 393-398. (in Chinese)
[ 2] 张智, 容易, 秦曈, 等. 重型运载火箭总体技术研究[J].载人航天, 2017, 23(1): 1-7.
Zhang Z, Rong Y, Qin T, et al. Research on overall technology of heavy launch vehicle[J]. Manned Spaceflight, 2017,23(1): 1-7. (in Chinese)
[ 3] Riddle K G,Nebel P W. Space Shuttle main engine controller assembly-a new era in rocket main engine control[C]/ /12thAIAA/SAE Propulsion Conference, Palo Alto, CA: AIAA,1976: 1-10.
[ 4] Van Hooser K P, Bradley D P. Space Shuttle main engine -the relentless pursuit of improvement[C]/ /AIAA Space 2011 Conference &Exposition,Long Beach,CA:AIAA,2011:1-16.
[ 5] Smith J J. Evolved composite structures for Atlas V[C]/ /38thAIAA/ASME/SAE/ASEE Joint Propulsion Conference and Exhibit, Indianapolis, IN: AIAA, 2002: 1-9.
[ 6] Каторгин Б И, Чванов В К, Евграфов В М, т. е.Исследование характеристик модернизированного двигателя РД-171М при его сертификационных испытаниях[J]. Труды НПО Энергомаш, 2005 (23):182-203.
Katorgin B I,Chvanov V K,Evgrafov V M,et al. Research of characteristics of RD-171M modernized engine at its certified tests[J]. NPO Energomash, 2005(23): 182-203. (in Russian)
[ 7] Sunakawa H, Kurosu A,Okita K, et al. Automatic thrust and mixture ratio control of the LE-X[C]/ /44thAIAA/ASME/SAE/ASEE Joint Propulsion Conference and Exhibit, Hartford, CT: AIAA, 2008: 1-8.
[ 8] Lonchard J M, Jeaugey I, Montheillet J, et al. High thrust engine demonstrations[C]/ /46thAIAA/ASME/SAE/ASEE Joint Propulsion Conference and Exhibit, Nashville, TN:AIAA, 2010:1-9.
[ 9] Myers W N, Weir R A. Electromechanical propellant control system actuator[C]/ /26thAIAA/ASME/SAE/ASEE Joint Propulsion Conference, Orlando, FL: AIAA, 1990: 1-8.
[10] Lister M J, Reichmuth D M. Electromechanical actuation for cryogenic valve control[C]/ /29thAIAA/ASME/SAE/ASEE Joint Propulsion Conference and Exhibit, Monterey, CA:AIAA, 1993: 1-8.
[11] McCormick S, Garrison M, Blasi R, et al. EM actuated cryogenic valve for engine control[C]/ /42ndAIAA/ASME/SAE/ASEE Joint Propulsion Conference and Exhibit, Sacramento,CA: AIAA, 2006: 1-13.
[12] Jung T, Han S Y. Cryogenic throttle valve driven by BLDC motor for thrust control of a liquid rocket engine[C]/ /3rdInternational Conference on Mechanical Engineering and Mechatronics, Prague, Czech Republic, 2014: 1-10.
[13] Jung T, Lee S. Development of BLDC motor driven cryogenic thrust control valve for liquid propellant rocket engine[J].The Korean Society for Aerospace and Space Sciences,2014,38(10):1026-1030.
[14] 谭永华, 杜飞平, 陈建华, 等. 液氧煤油高压补燃循环发动机深度变推力系统方案研究[J]. 推进技术, 2018, 39(6): 1201-1209.
Tan Y H, Du F P, Chen J H, et al. Study on deep variable thrust system of LOX/kerosene high pressure staged combustion engine[J]. Journal of Propulsion Technology, 2018, 39(6): 1201-1209. (in Chinese)
[15] 张贵田. 高压补燃液氧煤油发动机[M]. 北京:国防工业出版社, 2005: 74-78.
Zhang G T. High Pressure Staged Combustion Lox/Kerosene Rocket Engine[M]. Beijing:National Defense Industry Press,2005: 74-78. (in Chinese)
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02 01:59:46
装备制造技术(2020年9期)2021-01-26 00:14:42
测控技术(2018年12期)2018-11-25 09:37:44
西安航空学院学报(2017年3期)2017-07-05 14:58:36
北京航空航天大学学报(2016年2期)2016-12-01 03:00:27
北京航空航天大学学报(2016年4期)2016-02-27 06:32:11
电源技术(2015年9期)2015-06-05 09:36:06
电测与仪表(2015年20期)2015-04-09 11:53:48
电测与仪表(2015年3期)2015-04-09 11:37:42
弹箭与制导学报(2015年1期)2015-03-11 15:32:18