
医疗取药三自由度机械手结构及电气控制设计
2020-05-05 09:09:28陈剑宏赵洪照项启生鲍银宗肖国华
江苏科技信息 2020年6期
陈剑宏,赵洪照,项启生,鲍银宗,肖国华
(1.宁波市凯福莱特种汽车有限公司,浙江宁波 315600;2.浙江工商职业技术学院机电工程学院,浙江宁波 315600)
0 引言
医药生产中,药瓶的物流输送是医药包装自动化生产流水线中一项主要内容。药瓶在流水线上需要做检查、测试、转移等多项动作,因而,采用多自由度的机械手臂来实现药瓶在包装流水线上的物流转移是此类流水线生产的一个重要环节。机械手气爪的样子是多种多样的[1-4],有下列分类:①夹钳式取料手;②吸附式取料手;③操作器及转换器;④仿生多指灵巧手。转运机械手的基本要求为[5-9]:①能够准确无误地搬运棒料,同时兼具效率与安全;②机械手能够快速反应,运行安全,拥有足够的自由度,精准到位的动作。为此,本文介绍一种三自由度机械手的机械结构及电控控制设计,以供设计参考。

图1 模具结构布局
1 工作对象及工作要求
如图1a所示,药瓶为圆柱形药瓶,其外径Ø35 mm,高度65 mm。其在药品包装流水线上做检验工序时,需要L1线转移到L2,L1线的流动方向为F7,L2线的流水方向为F8,L1线和L2线的流水带有一定的高度差。药瓶在L1线的末端需要通过转移路径转移到L2线的起始位置。所需机械手臂的旋转中心在L1线和L2线之间为非对称安装。
如图1b所示,所需要的对象机械手臂需要实现的动作功能为:手抓M1能做F1-F2向的抓紧、F3-F4向的松开动作,且抓紧或者松开后能做T1-T2转向的旋转动作,手抓M1能由手臂M2带动做F5,F6地来回收缩运动。M1,M2在升降台M3上能跟随M3做F7,F8向的上下动作,及T3-T4正反向的旋转动作。
2 机械手机械结构设计
依据图1b所示的机械手臂功能要求,该机械手臂的机械结构设计如图2所示。手臂的结构组成包括以下几个子组件:手指组件、手臂伸缩组件、手臂提升组件、手臂旋转组件、基座。手指组件用于抓取药瓶动作,手臂伸缩组件用于手臂的取物距离调整,手臂提升组件用于手指抓取后的上下提升,手臂旋转组件用于将手指及伸缩臂做旋转运动,基座为整个手臂的支撑。
手指机构中,手抓M1为卡钳式手抓,其构成件包括件1~件10,两个卡爪由销钉活动固定在手抓板上后,由手指活塞气缸4进行驱动;手指活塞气缸4安装于一块板上后由伸缩手臂气缸22进行驱动,第一气缸6的进出气口为G1,G2。
手臂伸缩机构中,手指伸缩臂机构结构组成件包括件11~件23,第二气缸通过气缸支座22安装于支撑板23上,由G3,G4气口进出气驱动芯杆11左右移动。支撑板23通过两个导向套25活动安装于导向杆24上,可以上下滑动移动,支撑板23上另装有丝杠套28,该丝杠套28与丝杠36匹配,由该丝杠36驱动其上下移动。
手臂提升机构中,其组件包括件24~件36、件48、件49,两根导向杆24的上端安装上支撑板26,下端通过导向杆49锁紧安装于支撑盖37上。上支撑板26上安装上端盖27,上端盖27用于安装丝杠36的驱动电机32,驱动电机32的电机轴通过联轴器组件与丝杠36的上端连接。手指组件、手指伸缩组件通过安装于支撑板23上得以实现由丝杠36来进行整体驱动。
手臂旋转机构由于手指机构的移位转动,机构组成件包括件37~件47,其驱动电机43安装于底座40的底面上,通过连接销44来驱动连接端盖46进行转动,驱动连接端盖46上通过螺钉紧固安装支撑盖37,支撑盖37用于导向杆24及丝杠套28的竖直方向上的安装,驱动连接端盖46的下端安装平面轴承42,用于端盖46的竖直轴向旋转支撑,支撑盖37下端内壁上安装承力滚柱轴承38,该轴承下端由下承力端盖39和上承力端盖41进行卡位,而在底座40上使支撑盖37获得轴向和周向的受力支撑。
基座40采用阶梯式截面形状圆盘支撑结构,一则用于保护电机43不受损,二则减少整个手臂结构的总重量。考虑到手臂的工作环境洁净性,及工作所需机械较小等问题,整个手臂的动作驱动由气动元件和电机驱动来实施驱动[10-12]。

图2 手臂结构设计
3 气动控制设计
手臂中,手指组件、手臂伸缩组件的驱动主要由气动来进行驱动控制。图2中的第二气缸的G3,G4的进气源由1个三维四通电磁换向阀57进行调节控制,通用第一气缸的G1,G2也采用同样的三维四通电磁换向阀57进行调节控制。
气源50由室内流水线空压机提供,高压气体经储气罐52存储后,经分水过滤器53、减压阀54、比例调节后分两路供气,一路用于手臂伸缩缸的控制,一路用于手指夹紧缸的控制,为防止手臂伸缩缸动作的突然性,手臂伸缩缸的G3气口加装一个可调单向节流阀58。

图3 手臂机构气动控制回路
4 手臂电气控制设计
4.1 机械工作原理
机械手的工作流程为:首先需要按下启动按钮,然后选择自动挡或者手动挡,机械手随后开始工作。图4为机械手工作流程。当选择自动挡时:①从原点开始立柱向左旋转90°,到达左限位开关时停止;→②立柱垂直向下运动,到达下限位开关停止;→③手臂气缸伸出,到达前进限位开关停止;→④气爪抓紧工件;→⑤手臂气缸收缩,到达后退限位开关停止;→⑥立柱垂直向上运动,到达上限位开关停止;→⑦立柱向右旋转180°,达到右限位开关停止;→⑧手臂气缸伸出,到达前进限位开关停止;→⑨气爪松开工件;→⑩手臂气缸收缩,到达后退限位开关停止;→○11 11立柱左旋转90°回到原点,原点灯亮起;→○12按下停止按钮,机械手停止工作,按下启动按钮,机械手运动先归零,再开始运动;→○13如果选择手动挡可以继续按下任何按钮进行操作,直到运动到限位开关为止。
4.2 电气控制
在对机械手控制系统设计时,选择了PLC来进行控制,PLC的控制设计如下。
(1)I/O口分配信号送给可编程控制器,然后分配对应的输入端口;一些信号由可编程控制器输送到被控制的对象,分配对应的输出端口。另外,计数器以及定时器也要相对应地分配可编程序控制器,通过编号来识别信号。根据系统输入输出点的数目,决定选择三菱的FX2N系列FX2N-48MR,如表1所示。

图4 机械手工作原理

表1 输入口分配

表2 输出口分配
(2)控制接线FX2N-48MRPLC这种控制系统具有很高的灵活性的同时也非常稳定。在设计控制系统时,为了让设备适应更多的工作环境,对于机械手的控制,可以进行手动调整,即可以进行手动操作,也可以自动运行工作。并且在实际操作时,如遇到不同的情况,只要重新编写一个PLC系统就可以满足其他类系的工作情况。PLC控制接线如图5所示。
(3)控制程序。针对手臂的动作执行,所编写的控制梯形图程序如图6所示。
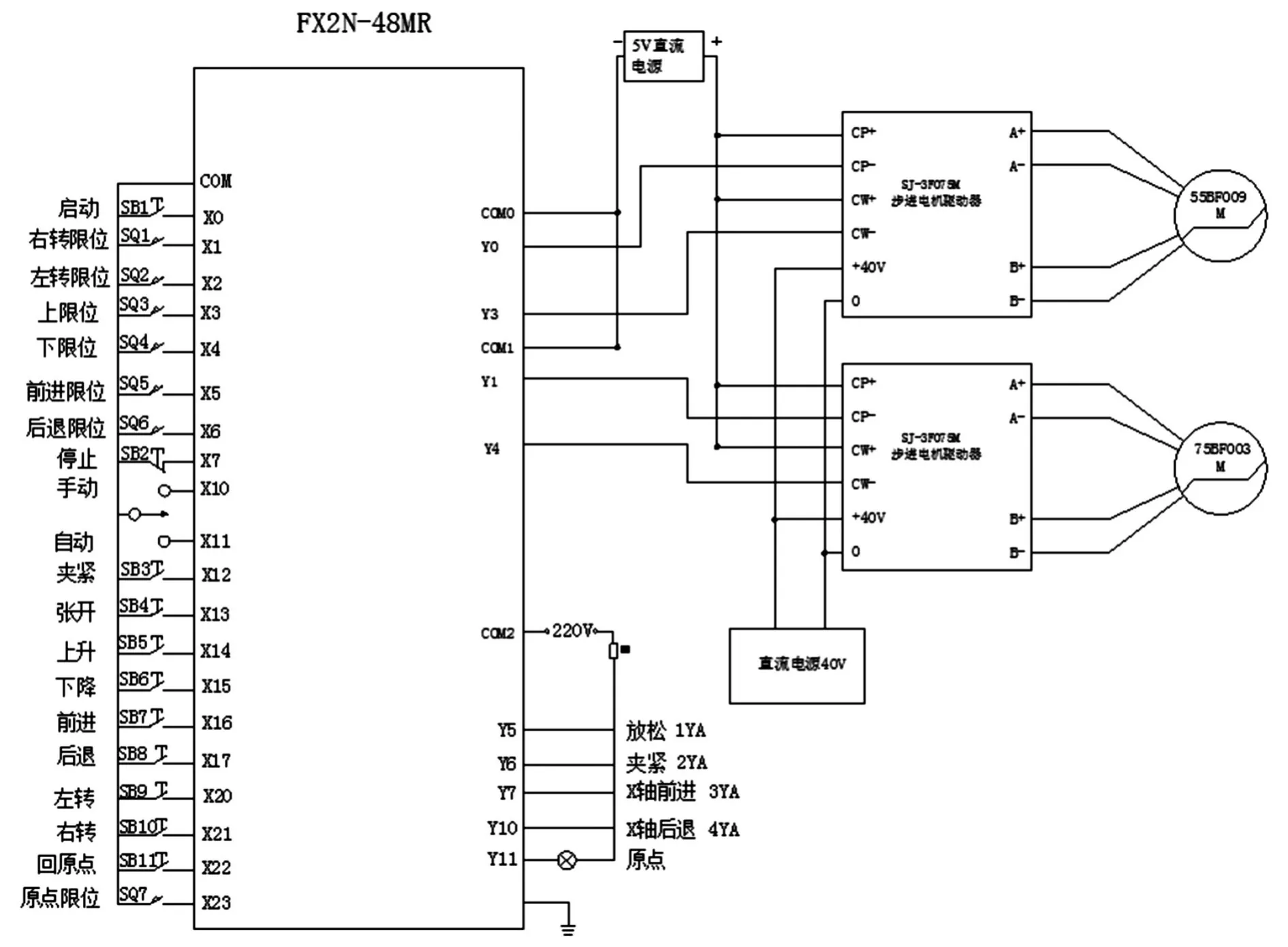
图5 PLC控制接线
5 结语
结合药瓶包装流水线生产工位功能的需要,设计一种三自由工位转运机械手臂,机械手臂的机械结构组成主要包括手指组件、手臂伸缩组件、手臂提升组件、手臂旋转组件、基座。手臂的抓取和伸缩功能采用气动控制,气动控制采用2个三维四通电磁换向阀来对2个动作气缸进行驱动控制。手臂的升降和旋转采用步进电机机型驱动和控制。结合手臂的动作需要,采用FX2N-48MR PLC控制器来进行电气控制。本机械手臂的优点在于:可以通过对机械手爪做稍微改变,就可以轻易实现对更多的工件进行操作,适用于更多的工作环境,也就提高了它的性价比,能够给企业带来更多的利益。

图6 程序控制
猜你喜欢
橡塑技术与装备(2023年2期)2023-02-10 02:36:20
中国特种设备安全(2022年6期)2022-09-20 02:53:48
诗选刊(2020年3期)2020-03-23 13:34:35
哈尔滨轴承(2020年4期)2020-03-17 08:13:40
制造技术与机床(2019年11期)2019-12-04 05:50:26
猪业科学(2018年4期)2018-05-19 02:04:36
深圳职业技术学院学报(2015年5期)2015-11-30 06:22:25
大众健康(2015年6期)2015-06-16 11:01:52
发明与创新·大科技(2014年12期)2014-04-29 00:44:03
机械制造与自动化(2014年1期)2014-03-01 04:21:45
