
自动驾驶汽车的智能决策模型研究
2020-05-03 13:54张效宇赵祥磊杨科
汽车实用技术 2020年7期
张效宇 赵祥磊 杨科
摘 要:行为决策系统在很大程度上反映了自动驾驶汽车的智能化水平,作为自动驾驶汽车的大脑,行为决策系统决定了自动驾驶车辆的可行性和安全性。文章基于行车效率与行车安全对高速自动驾驶汽车的智能决策进行了研究。通过引入能效函数与动态子区域监测系统,实时计算本车道与相邻车道的行车能效值以及本车与周边车辆的碰撞风险,并基于此确定最优驾驶策略,一定程度上提升了自动驾驶车辆的行车效率与安全。
关键词:智能驾驶;决策;安全;效率
Abstract: The Principal objective of this work is to study intelligent decision for highway automated driving. The Proposed framework develops, implements and tests a framework for intelligent decision based on efficiency and safety. It considers the vehicle-around situation based on a state space with eight subareas, which makes the real-time assessment for current traffic situation possible and efficiency. Based on the proposed framework, realistic simulation has also been carried out and presented. Results show that the intelligent decision based on the proposed framework is feasible and effective.
前言
作為自动驾驶车辆智能化水平的重要体现,智能决策系统在自动驾驶中起着至关重要的作用。近年来,随着人工智能及环境感知技术的快速发展,智能驾驶的相关研究也取得了长足进步。但是在面对真实复杂的驾驶环境及多样的交通状况时,人们对汽车自动驾驶的安全性要求仍在不断提高,这些对智能驾驶的决策提出了更大的挑战。本文的研究重点则是基于现有的车辆感知信息及实际的道路状况,考虑基于行车安全和行车效率的智能驾驶决策。
本质上讲,智能决策的好坏很大程度体现为对本车周围目标信息的准确判断上,其具体的实施可以从两方面来考虑,即战略和战术。战略层面更多的是基于规则去判断该怎么走或走哪条道,而战术层面则更多的是考虑车流交通等实时信息,从而更高效更安全的完成任务。换句话说,战略层面更多的是结合已有的固定信息,如导航轨迹,高精度地图的车道信息等对车辆进行运动轨迹的约束,而战术层面则更多的考虑本车周围的实时交通流信息,实时的进行车辆决策控制,因此其在实际应用时具有更强的灵活性,这也是本文研究的重点。
1 决策模型的建立
智能决策中一个很重要的问题就是安全问题,即避免车辆在运行过程中与其它车辆发生碰撞风险。碰撞风险主要从两个维度去考虑[1]:
一是本车与前车距离,即主要考虑两车之间的时间距离与理想时间距离tHW的比值:
式中:XTrgt,VTrgt分别表示目标车辆与本车的距离以及目标车辆的绝对速度。VEgo表示本车速度。tRatio本质上反映了本车与目标车的距离的接近程度。
二是本车为避免与目标车碰撞时所需的减速程度,即本车所需的减速度与其所能接受的最大减速度之比(参见式(2))。 当避免碰撞所需的最大减速度超过了所设定的临界阈值时即认为有碰撞风险。BRatio本质上反映了碰撞的危险程度,其中Bd max表示本车所能接受的最大减速度。
通过对这两个特征参数的实时监控,可知道本车与周边车辆的实时碰撞风险并在决策中加以防范。
除了上述提及的驾驶安全风险,实际的决策过程还应考虑如下几方面的决策属性:即行车效率和驾驶舒适性。行车效率主要考虑本车当前速度与驾驶员期望速度的偏差,研究表明,驾驶员在行车途中,总是期望以最快的速度到达预期的终点[2]。驾驶舒适性则主要考虑车辆在跟随轨迹过程中可能产生的侧向加速度及横摆角速度等变量,此部分主要在路径规划时考虑,本文基于决策的角度暂不考虑驾驶舒适性指标的影响。 鉴于此,本文主要考虑以下几个方面的决策属性:
(1)智能驾驶车辆距离本车道内前方最近车辆的距离X0;
(2)智能驾驶车辆与道路左侧车道内障碍物的距离X1;
(3)智能驾驶车辆与道路右侧车道内障碍物的距离X2;
(4)目标车道的最高限速Vmax;
(5)驾驶员设定速度与本车当前车速的偏差。
为了能够实时比较不同车道的车流信息并进行基于安全和效率的决策判断,本文引入了如下的“能效函数”,其中U1反映了系统的行车效率,U2和U3则从安全性角度进行考量。通过对安全和效率两指标的定量分析,可实现对车道行车信息的实时比较,假定:
式(7)反映了碰撞的危险程度,但其未考虑制动减速度的限制,若进一步考虑制动减速度的要求,可用式(2)替换。
至此,基于效率和安全的能效函数构建完毕,考虑如上所述的能效函数U1,U2和U3并进行权重分析,引入权重系数ωi得到总的能效函数U。
此能效值反应了当前时刻本车道的评判情况,通过比较不同车道的能效值,可实时判断出当前的最优驾驶决策。
为能更客观的比较,能效函数还应考虑未来时刻及历史时刻的值,以保证决策的连续性[3]。未来能效函数的计算取决于传感器本身对本车当前周边环境的感知信息(包括障碍物距离,速度等)并进行推测,假定某一时刻车辆感知所得的周边系统状态信息为Xk,则下一时刻车辆的周边系统状态信息可表述为:
其中Pk表示预测的车辆运动状态,如车辆在驶出高速匝道口时,可以提前预测其在下一时刻会进入匝道旁边相邻的车道上。
再考虑历史时刻的能效值,本车在当前车道的变道能效函数可用式(10)表示,式中Wk表示权重系数。 权重系数的引入可实现能效值对历史和未来的权重调节。需要注意的是,能效函数对历史值的平均可使决策的变化变得平缓,但另一方面也会引入一定的迟滞,因此式(10)中人为引入了控制因子δk,通过设定δk为0,可重置系统的记忆。此外,式中引入1-Uk-n, past表示系统的不满意度,即如果当前的能效函数不是最优的,且在一定时间内没有改变,系统的能效值会逐渐降低至零,当不满意度累积到一定程度时,系统决策便会基于周边的交通流做出相应的改变[4]。
2 碰撞风险的概率评估
实际中由于传感器本身特性的限制以及駕驶环境的复杂性,上述特征参数所涉及的变量未必能准确反映实际情况(比如传感器检测的目标车辆速度并不一定是实际的速度,而是带有一定噪声信号的随机信号,另外由于融合算法导致的测量不准确性在实际测量中也时常会有体现),因此可引入随机变量并进行碰撞风险的概率估计[1][3][5]。
上述两式可对实际道路上任意两车的碰撞概率进行评估。需要注意的是,实际计算时需对上式概率形式进行离散化处理,通过比较累积概率,决策会选择安全性相对较高的驾驶策略并执行。
3 决策算法实现的架构流程
图1给出了能效函数的总体算法框架,即系统首先根据车身传感器等外部信息进行能效函数的计算并对比确定各车道能效值的高低,此能效值的高低反映了理想状况下的车流信息,实际应用时还需考虑车道边界及车道线虚实等限制条件,因此基于效率和安全的能效值还需进一步经过规则约束模块做进一步的判断直至最终输出。 例如系统经过能效计算确定左侧车道能效最高,但是此刻车道线为实线,则左侧车道的能效值将被直接赋0。
以上基于安全和效率的能效函数在一定程度上实现了全自动驾驶的车道智能选择,在实际执行时,除了考虑以上所描述的部分,本车还得实时监控周边的交通流信息(如左右侧盲区内是否有危险车辆),以免发生碰撞风险。因此,决策模块有必要对本车周围的车辆信息做进一步评估。文献[6]中给出了一种基于势场的连续状态空间产生法并基于此状态空间进行车辆的行驶决策,然而此法由于实时性较差,并不适合用于实际的测试。
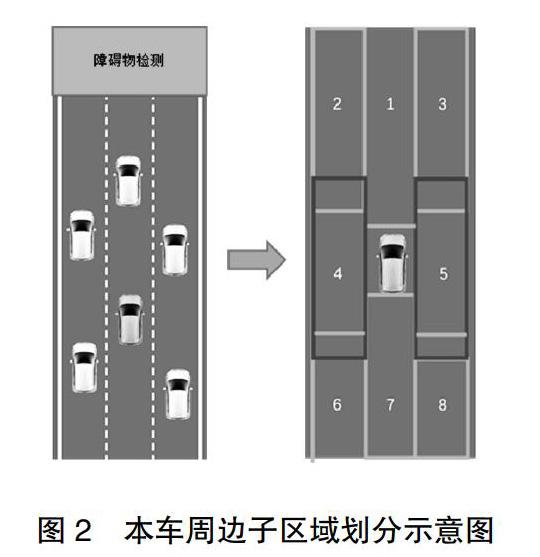
文献[3]给出了一种相对简单的方法,即全状态空间法。该方法将车身周边划分成8个子区域,然后分别对每个子区域进行实时监控并给出相关信息以供决策参考。
如图2所示,本车周边的8个子区域分别为1-前方,2-左前方,3-右前方,4-左侧,5-右侧,6-左后方,7-后方,8-右后方。其中 1,2,3,7为固定区域,其横向宽度的选取主要考虑实际车道的宽度。4,5,6,8为动态区域,其区域长度与实际的车速相关。
实际运行时,车辆周边的8个子区域会实时监控本区域的车辆状况,当有车辆在本区域出现且该车辆与本车有碰撞风险时,本区域会给出标志位1,反之则为0。对应的8个标志位会被存入一个8维数组以供决策使用。
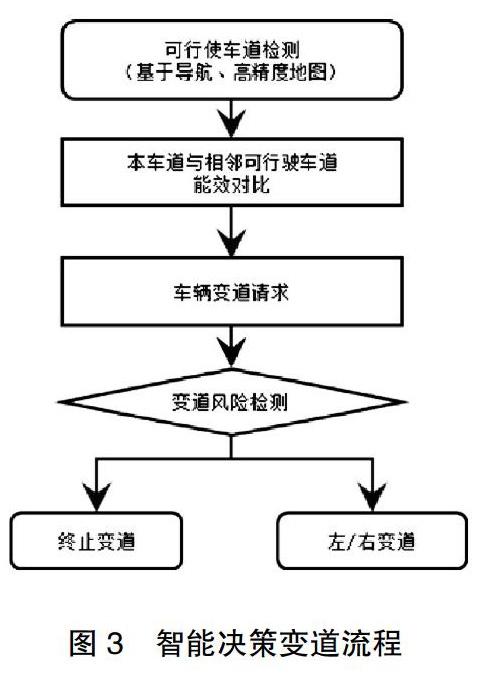
综上,基于安全和效率的智能决策大体流程如下:
(1)首先基于导航,高精度地图等信息,系统进行大类决策,即判断当前可行驶车道;
(2)如果基于导航和高精度地图判断当前可沿本车道行驶,则系统会基于效率和安全自动比较当前车流状况以及左右两侧可行使车道情况并判断是否需要变道干预;
(3)若基于智能决策判断需要变道,则系统会自动进行变道环境检测。整个决策流程可参见图3。
4 决策模型的测试验证
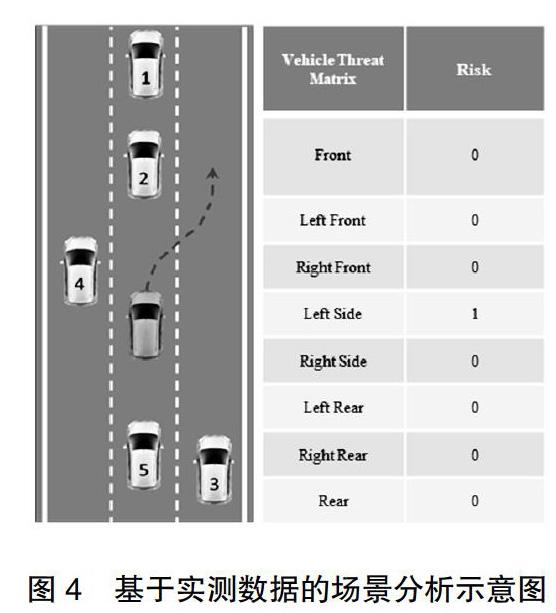
图4给出了一组基于上述方法的实测数据分析图,图中,棕色车辆表示本车,其余颜色的车辆表示环境感知模块识别的周围车辆。本车当前车速为9.3 m/s,以本车前保中心为坐标原点,前向为正。 图示各目标车辆的中心点距离及速度分别为ID1(38.4m,10.4m/s),ID2(23.9m,8.4m/s),ID3(-18m,9.1m/s),ID4(3.3m,10.4m/s),ID5(17.8m,10.24m/s)。
基于当前信息,可计算出此刻本车与左侧车辆ID4有碰撞风险,因此决策层会给出禁止向左变道的提示。 从图右侧基于模型计算出来的危险评估列表来看,模型的危险分析与实际情况一致。另一方面,基于安全和效率的能效函数会计算出此刻右侧车道的行车效率大于本车车道,因此系统会给出建议右转的智能决策,查子区域风险表得右转风险为0,进而给出车辆右转的决策。
当本车变道或是弯道行驶时,情况会变得相对复杂,此时需要进行空间坐标变换或是借助高精度地图、V2X等获得更多的信息以用于决策。
5 结论
本文基于行车效率和行车安全两方面对自动驾驶的智能决策进行了研究,通过实时对比交通流的信息,智能选择最适合本车的行驶车道,有效的提升了自动驾驶车辆的行车效率与安全。在实际的交通流环境中,还需进一步考虑本车在变道过程中可能面临的复杂场景,例如,智能决策判断当前应该向左侧变道且变道无风险,于是本车开始执行变道,但是变道还未完成时,轨迹道路上突然出现风险车辆,此时智能决策则需要重新决策去规避风险,这也是本文下一步要进行的工作。
参考文献
[1] Niehaus,Stengel. Rule-Based Guidance for Vehicle Highway Driving in the Presence of Uncertainty[C]. American Control Conference. IEEE,2009.
[2] 陈佳佳.城市环境下无人驾驶车辆决策系统研究[D].中国科学技术大学, 2014.
[3] Ardelt M, Coester C, Kaempchen N. Highly Automated Driving on Freeways in Real Traffic Using a Probabilistic Framework[J]. IEEE Transactions on Intelligent Transportation Systems, 2012, 13(4): 1576-1585.
[4] Ardelt M, Waldmann P, Homm F, et al. Strategic Decision-Making Process in Advanced Driver Assistance Systems[C]. Advances in Automotive Control. 2010:566-571.
[5] Ulbrich S, Maurer M. Probabilistic online POMDP decision making for lane changes in fully automated driving[C]. International IEEE Conference on Intelligent Transportation Systems. IEEE, 2013.
[6] Reichardt D. Kontinuierliche Verhaltenssteuerung eines autonomen Fahrzeugs in dynamischer Umgebung[D].Universit?t Kaiserslautern, 1996.
猜你喜欢
科学大众·教师版(2022年4期)2022-04-13
语数外学习·高中版中旬(2021年12期)2021-03-09
青少年科技博览(中学版)(2019年2期)2019-06-20
决策(2018年8期)2018-12-10
小天使·四年级语数英综合(2018年1期)2018-07-04
广东教育·高中(2017年11期)2017-12-04
中国报道(2015年6期)2015-06-19
时代英语·高二(2015年1期)2015-03-16
