基于GNSS和静力水准的海洋石油平台沉降监测方法
2020-04-30 06:40
船海工程 2020年1期
(1.天津大学 建筑工程学院,天津 300072; 2.天津市陆海测绘有限公司,天津 300304)
海洋石油平台一般远离陆岸,对其进行高精度的、长期连续、无人值守的沉降监测具有一定的难度。目前已有学者将GNSS-RTK应用于超高层建筑、桥梁、滑坡、采矿等工程变形监测中[1-5]。静力水准测量是利用互相连通的静止状态的液体表面在重力作用下高程相等的原理进行高程传递,从而测量出2点或多点之间的高差,或同一点2时刻的高程变化(垂直位移)。也有学者将静力水准测量应用于高铁、地铁隧道、高能粒子加速器、地球固体潮等精密工程沉降监测中[6-9]。但少见应用于海洋石油平台沉降监测的报道。为了分析GNSS-RTK和静力水准测量应用于海洋石油平台的沉降监测的适用性及优缺点,以胜利油田埕岛中心一号平台沉降监测为例,通过对试验获取的监测数据进行处理分析,掌握海洋石油平台沉降的变化规律;对GNSS-RTK和静力水准的测量精度进行验证。
1 海洋石油平台沉降监测方法
1.1 GNSS-RTK测量原理
地面点上的用户接收机接收天空中GNSS系统多颗(4颗以上)卫星信号及该信号发射的时刻,因为卫星信号(电磁波)的传播速度是已知的,从而可计算出各卫星与地面点的距离值,并根据同时接收到的各卫星实时已知的位置信息,解算出地面点的位置坐标。在解算过程中,由于受到卫星轨道误差、卫星时钟误差、电离层延迟误差、对流层误差、多路径效应误差及接收机时钟误差等因素的影响,解算出的地面点坐标有一定的误差。为了消除或减弱这一误差,一般采用GNSS-RTK差分定位测量,即同时采用2台GNSS接收机工作,1台安置在地面一已知坐标的基准点上,通过该点测得的坐标与已知的坐标比较,得到以该基准点为中心的一定范围(10 km)的测区内大小基本相同的公共误差值;然后将公共误差值通过电台实时传输到测区内的另1台接收机,另1台接收机安置在所需监测的测点上,消除所测得的测点坐标中所含相同的公共误差,从而获得该点精确的坐标值,其定位测量精度通常能达到±(2~3)cm。
1.2 静力水准监测系统组成及工作原理
静力水准监测系统组成见图1。

图1 静力水准监测系统组成及工作原理
在海洋石油平台的各监测点处安置静力水准器,各水准器的储液容器相互之间采用连通管相连(储液容器和连通管内装有防冻液)。各储液容器中的液体在地球重力的作用下,液面永远保持同一高度。当平台某监测点下沉或上升时,则此处水准器的液面高度会产生变化(液面上升或下降),同时其他各监测点处水准器的液面高度也会随之有所变化(液面下降或上升)。电磁位移传感器安装在各水准器的上端,传感器能实时精确地探测到各水准器液面高度的变化值,各传感器与同一巡检仪相连,并通过巡检仪将探测到的液面高度变化值信息传输给计算机;计算机在记录、处理、存储监测信息的同时,还可以采用GPRS模块通过GSM无线通信网络将监测信息发送至陆地的监控中心。
2 试验分析
2.1 工程背景
胜利油田埕岛中心一号平台位于山东省东营市海域,离岸约7.8 km,平台结构分布见图2。其中,生产平台主体结构长50 m、宽20 m,有4条桩腿,每条桩腿的总长度48 m,入泥深度约11 m,因长期受潮汐海流水平推力、海底冲刷和风荷载影响,导致生产平台的桩腿侧摩阻力下降,桩腿入泥深度的最佳持力层改变。试验同时采用GNSS-RTK和静力水准测量的方法监测生产平台的沉降。
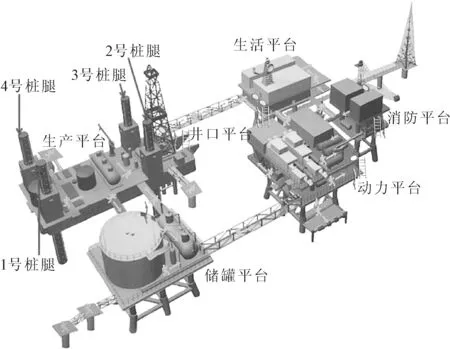
图2 埕岛中心一号平台结构分布
2.2 仪器选用与测点布设
试验对生产平台的4条桩腿的沉降进行监测,监测仪器采用HC-R100磁致伸缩式静力水准仪,其量程为100 mm,标称精度为±0.1 mm,采样周期为0.5 h/次。根据业主提供的资料数据得知,与生产平台相邻的井口平台的桩腿入土深度为100 m,相对比较稳定。因此,测量的基准站选设在井口平台的桩腿上。生产平台的4条桩腿的监测点分别选设在平台上各桩腿的固桩室内,提前加工静力水准仪的L形安装支架,先将安装支架固定在固桩室内的桩腿上,再将仪器固定在支架上,采用连通管将各静力水准仪的储液容器串连,见图3。

图3 静力水准仪安装示意
安装时,每个储液容器要置于标高大致相同的位置,最大高差不超过2 cm,各储液容器顶部的磁位移传感器的数据采集电源线并连至同一巡检仪,巡检仪与计算机相连。
GNSS-RTK试验只对生产平台1号和3号桩腿的沉降进行监测,监测仪器采用海星达H32全能型双频接收机,该仪器能同时接收来自GPS、GLONASS、BDS三星系的卫星信号,采样频率为1 Hz,其标称精度为:平面±(10 mm+10-6),高程±(20 mm+10-6)。本次GNSS-RTK试验的基准站选设在离生产平台约8 km的陆岸,监测点分别选设在1号桩腿和3号桩腿的顶部。
2.3 数据采集及处理分析
试验连续监测24 h,期间海上西南风3~4级,浪高约2 m。各桩腿采用静力水准测量方法测得的沉降曲线见图4,1号桩腿和3号桩腿采用GNSS-RTK 测得的高程变化曲线分别见图5、6。
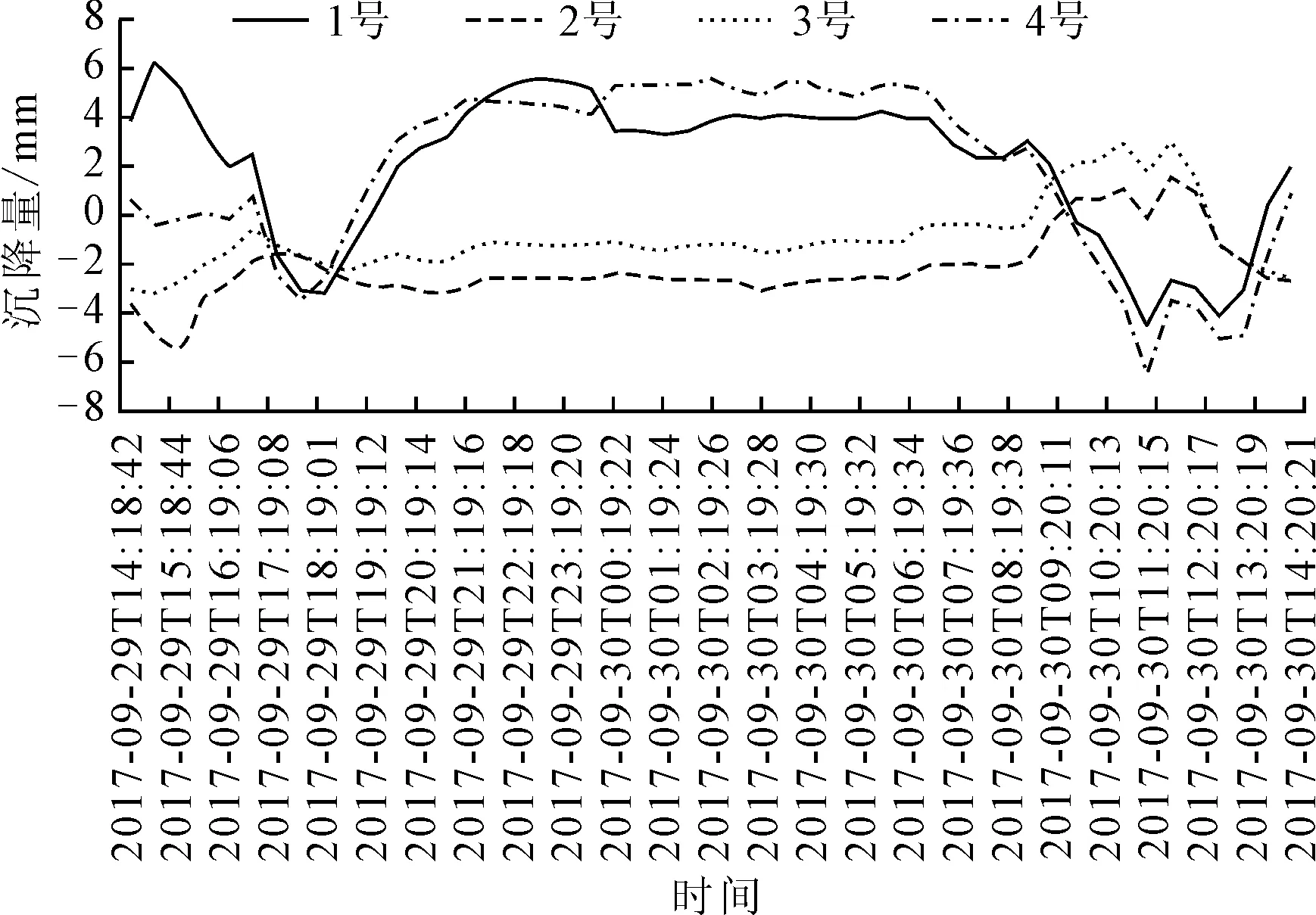
图4 各桩腿静力水准测量测得的沉降变化
由图4可见,4条桩腿在24 h内的沉降变化范围约为-6~+6 mm,而且每条桩腿的沉降和上升都存在反复、可逆现象,从曲线的首尾两端来看,在24 h之后,各自又都基本回到原有状态。
分析认为,桩腿的下端深深插入海底,上端为自由端,海水每天两次的涨潮落潮产生强大的海流,海流对各桩腿会产生巨大的水平推力,桩腿在海流水平推力的作用下,类似一个悬臂,处于悬臂自由端的上端必然会产生一个水平位移,水平位移导致桩腿发生微小的倾斜,倾斜后桩腿顶部的垂直高度变矮,这样,位于桩顶的静力水准仪的监测结果必然会显示桩腿“下沉”。海水每天周期性涨落,但海流的方向和大小是随机变化、不规则的。因此,就出现了上述各桩顶沉降和上升的大致周期性的反复可逆现象。
由图4还可以看出,1号和4号桩腿的沉降与2号和3号桩腿的沉降,在大多数时间段都是下沉与上升恰好对称相反,且在部分时段出现升沉交点,这4条沉降曲线在任何同一时刻的算术平均值都基本在0~±2 mm范围内。这4个桩腿上的静力水准仪的储液容器是相互连通的,因此他们也是相互影响的,即一个液面的上升,必然会导致其他液面会有所下降,从图2可见,1号桩腿和4号桩腿相距较近,图4显示出他们的液面升降大致相同;2号桩腿和3号桩腿相距较近,他们的液面升降也大致相同。从上述分析可知,静力水准测量可以监测海洋石油平台毫米级的沉降量;各桩腿在本次试验监测的24 h里,基本不存在永久性的、不可逆的真实沉降。
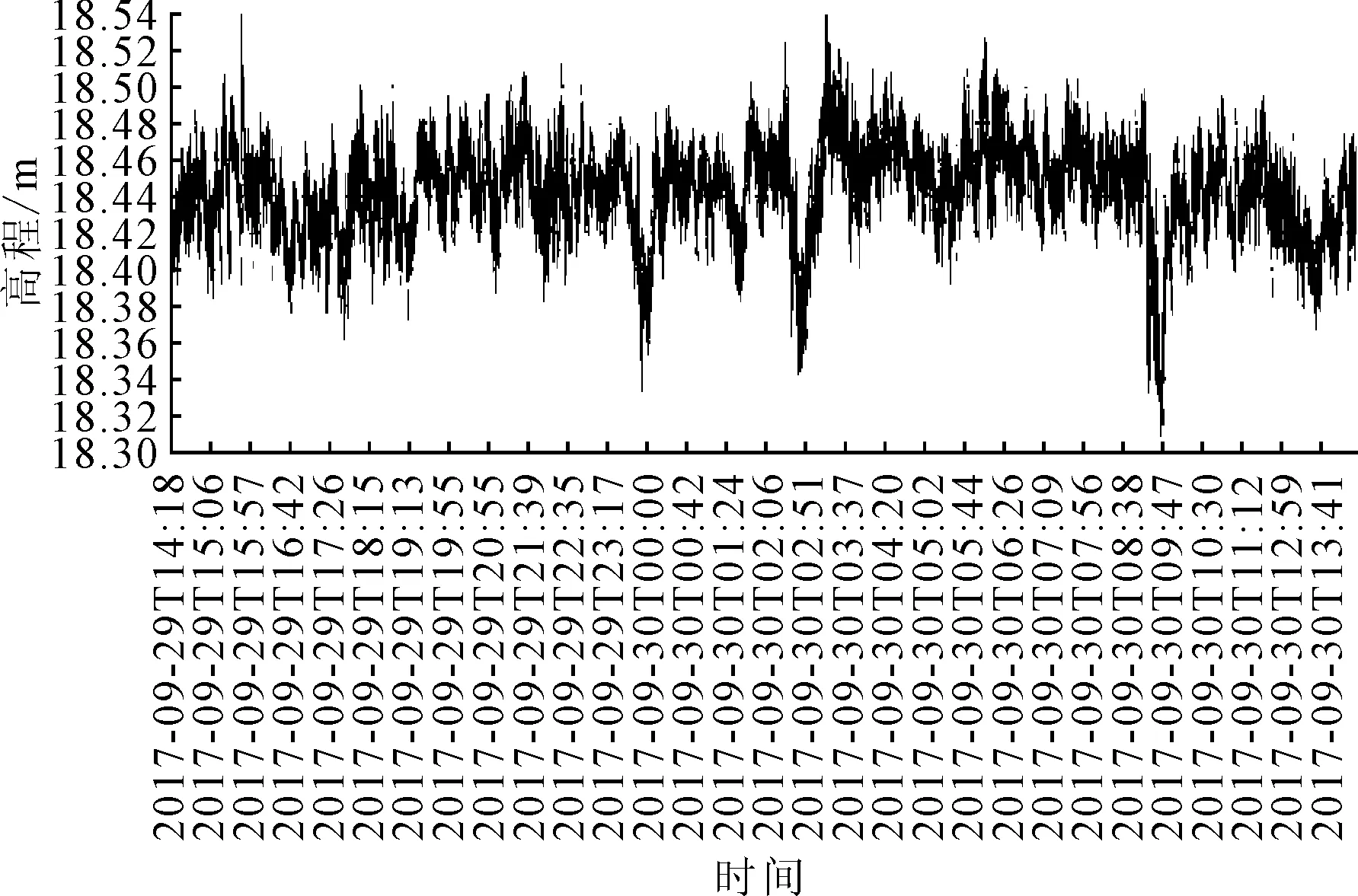
图5 1号桩腿 GNSS-RTK 测得的高程变化
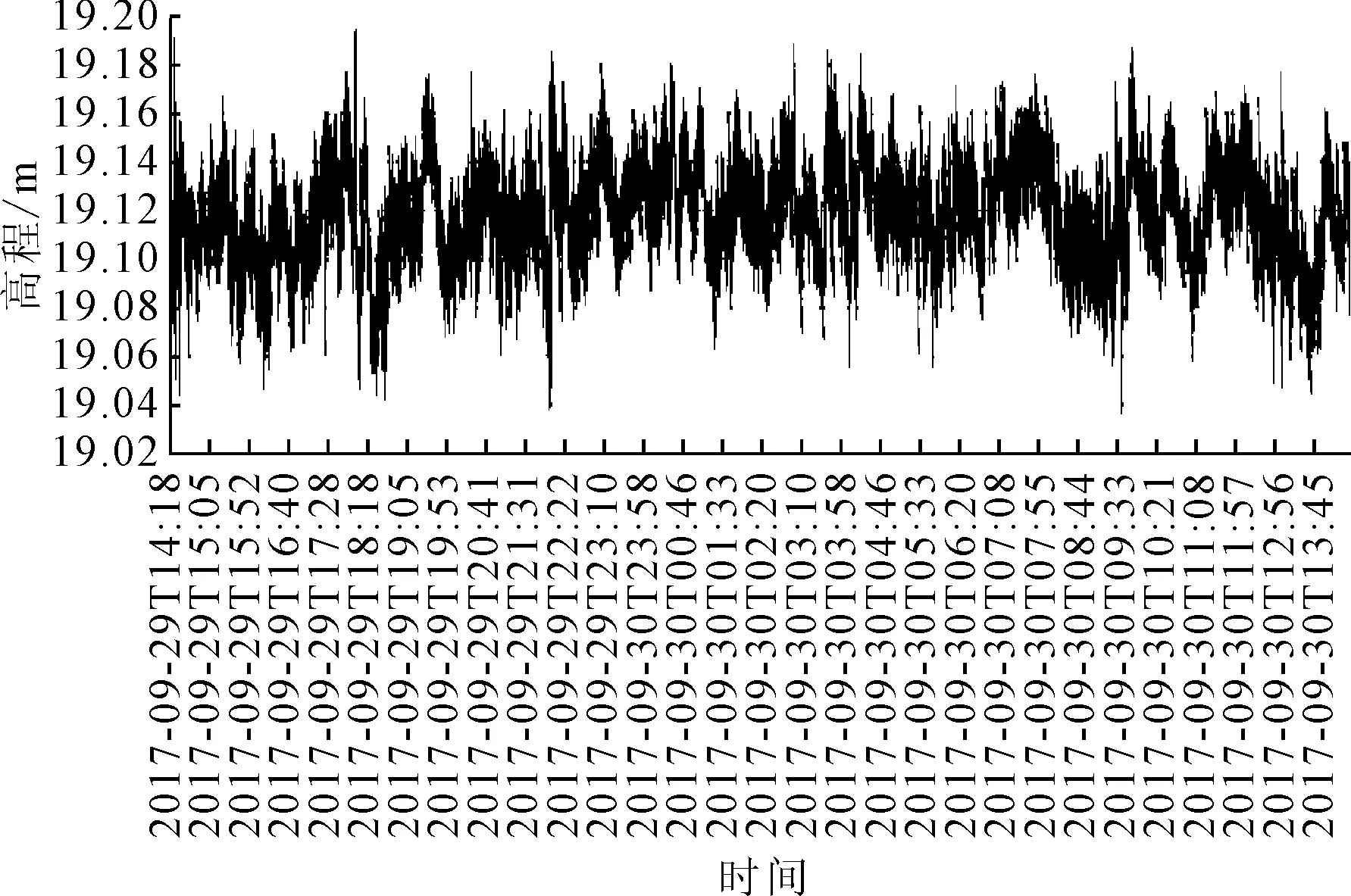
图6 3号桩腿 GNSS-RTK 测得的高程变化
由图5和图6可见,1号和3号桩腿24 h测得的高程基本上分别以高程值18.43 m和19.12 m为平衡点上下波动(测点在两桩腿所设位置的高度有所不一样)。尽管波动既有上升,也有下沉,但从整体上看,图5、6中的曲线无长期向上或向下的变化趋势,这说明两桩腿不存在永久性的不可逆沉降。
另外,如果忽略个别孤立的“极值”点,1号桩腿和3号桩腿高程的最大波动范围分别为18.34~18.52 m,19.06 ~19.18 m。即他们的波动幅度分别为±9 cm和±6 cm。GNSS-RTK监测仪器采用的是海星达H32全能型双频接收机,该仪器测高程的标称精度为:±(20 mm+10-6)。陆岸的基准站距离1号和3号桩腿约8 km。因此,测量误差应该约为±28 mm。从上述2桩腿测得的高程波动幅度来看,GNSS-RTK在海上的测量误差比通常在陆域的测量误差要大一些,这可能是因为海面对于卫星信号会产生更大的多路径效应误差。这样大的波动幅度同时也表明,如果对监测数据不采取滤波去噪的措施,或不改进仪器性能、提高仪器测量精度,GNSS-RTK目前尚不适合海洋石油平台厘米级或更小的沉降量监测。
3 结论
1)海水每天涨潮落潮产生的海流对海洋石油平台各桩腿产生巨大的水平推力,类似于悬臂的桩腿上端(自由端)必然会产生水平位移,水平位移导致桩腿发生微小的倾斜,倾斜使得位于桩顶的平台的高程降低,从而出现微小的“沉降”,但海水每天涨潮落潮呈周期规律,因此这种“沉降”是周期性的、反复可逆的。
2)理论上,GNSS-RTK和静力水准测量都可用于海洋石油平台的沉降监测,但从试验精度上看,静力水准测量适用于毫米级的沉降量监测;而GNSS-RTK可能因海面产生更大的多路径效应误差,目前尚不适合海洋石油平台厘米级或更小的沉降量监测,其仪器性能或监测数据的处理方法有待提高或改进。
3)如果静力水准测量在平台范围内无稳定的基准点可选设,则无法监测到海洋石油平台的整体绝对沉降。在这种情况下,静力水准测量只适用于海洋石油平台各桩腿的相对沉降监测。对于海洋石油平台整体的绝对沉降,目前只能采用GNSS-RTK的方法监测,因此,进一步提高GNSS-RTK的监测精度具有重要的实际应用价值。
4)GNSS-RTK的监测点之间互不影响,但为了确保基准点的稳定,用于海洋石油平台沉降监测的GNSS-RTK的基准站需选设在陆岸。另外,GNSS-RTK目前只适用于离岸不超过10 km的海洋石油平台的沉降监测;对于离岸超过10 km的海洋石油平台的沉降,需进一步研究采用GNSS的星基差分方式进行监测。
猜你喜欢
建材发展导向(2022年10期)2022-07-28
防爆电机(2022年1期)2022-02-16
阅读(科学探秘)(2019年4期)2019-06-19
科技创新与应用(2019年6期)2019-03-22
读写算(2018年2期)2018-07-05
中国教育技术装备(2016年22期)2017-03-02
发明与创新·大科技(2016年5期)2016-05-17
科技视界(2016年10期)2016-04-26
吉林农业(2015年6期)2015-10-16
科技与创新(2015年11期)2015-06-16