
全自动运行信号系统与 洗车机接口分析研究
2020-04-28 12:26罗斌龙赵晓峰孙思南邱鹏
现代城市轨道交通 2020年4期
罗斌龙 赵晓峰 孙思南 邱鹏
摘 要:全自动运行系统自动洗车功能的实现,依托于信号系统与洗车机之间的接口配合。在全面分析洗车机类型的基础上,针对移动式洗车方式进行详细接口设计与分析,描述自动端洗和自动非端洗模式下的清洗场景,同时考虑手动洗车模式和降级洗车模式,从而提出一套完整可行的接口技术方案。
关键词:城市轨道交通;全自动运行;信号系统;自动洗车;接口分析
中图分类号:U284.48
全自动运行系统是基于现代计算机、通信、控制和系统集成等技术,实现列车运行全过程自动化的新一代城市轨道交通控制系统,包括信号、车辆、综合监控、通信、站台门、洗车机等系统。
随着全自动运行信号系统的不断部署和实施,作为必备功能的自动洗车,值得进行深入分析和研究,特别是整个自动化列车清洗过程所依赖的信号系统和洗车机之间的配合接口。
1 自动洗车需求
城市轨道交通全自动运行系统的列车清洗作业,按照洗车方式可分为2类:固定式洗车和移动式洗车。固定式洗车是指在清洗过程中,列车停在固定位置,洗车机自动完成两端和侧面的清洗;整个洗车线只有1个停车位,洗车机需要配置整列车长度的侧面清洗设备。移动式洗车是指在清洗过程中,列车需要先后停在2个不同的停车位,侧面清洗需要通过列车缓慢移动来完成。相比固定式洗车,移动式洗车的洗车线长,多1列车加端洗设备长度的距离,但是侧面清洗设备少,排水设施的布置也更加简洁。
在人工车辆段中,洗车线通常采取移动式洗车。在全自动运行系统中,移动式洗车依然是主流方式,固定式洗车通常只在场地受限的车辆段有所应用。
在全自动运行系统中,分为正常情况下洗车和非正常情况下洗车2种。
(1)正常情况下,系统应根据洗车计划进行洗车作业提示,人工确认后应自动触发至洗车线的进路。信号系统与洗车机、车辆进行信息交互,控制车辆恒速运行完成自动洗车。洗车完毕后,系统根据洗车计划自动触发回到指定列检库的回库进路。
(2)非正常情况下,主要是指列车在洗车过程中发生故障,如车地通信故障、洗车机故障等,则应退出自动洗车工况,转而使用人工模式驾驶列车完成洗车作业。由于目前洗车机工艺设备可靠性有限,全自动运行系统中进行自动洗车时,往往要求洗车线控制台和待洗列车上都有人值守监护。
下面针对全自动运行系统中常用的移动式洗车,结合芜湖市轨道交通1号、2号线一期全自动运行项目,进行自动洗车的运营场景和详细接口分析。
2 洗车运营场景分析
按照洗车机的控制方式进行划分,洗车运营场景包括自动洗车模式、手动模式和发生故障时的降级模式。
2.1 自动洗车模式
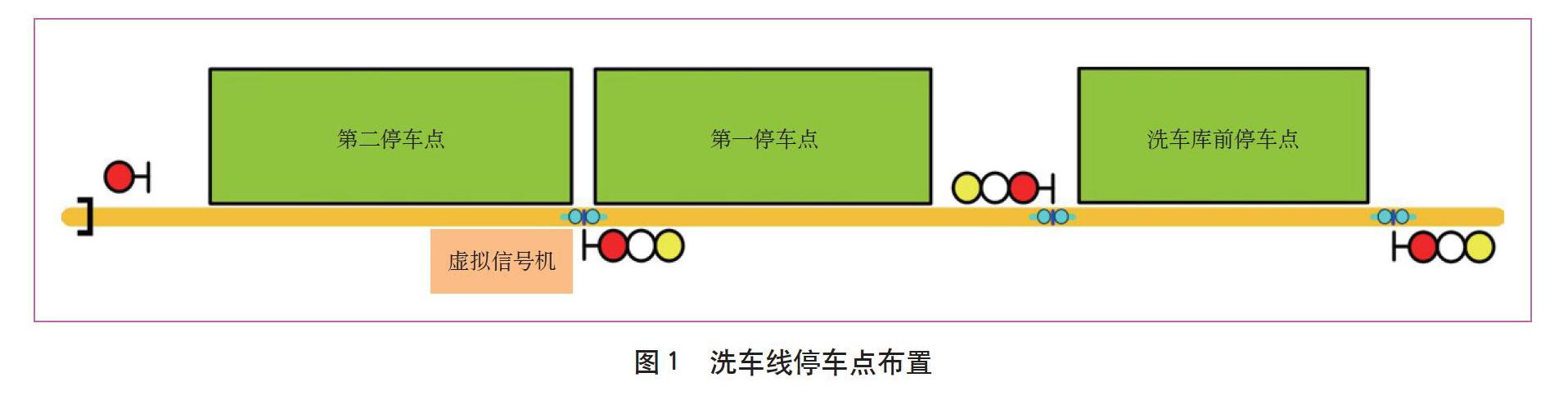
在洗车机自动控制洗车模式下,包括自动端洗和自动非端洗2种模式:端洗是清洗列车两侧和头尾两端,洗车作业过程需要停车2次;非端洗只清洗列车两侧,洗车作业过程只需要停车1次。采用移动式洗车的步骤场景需要结合具体的站场图设备布置,如图1所示,下面分别介绍这2种自动洗车模式的洗车场景。
2.1.1 自动端洗模式
列车在洗车库前停车点停稳后,信号系统接收到“洗车机状态正常”,并将“洗车请求”发送给洗车机,洗车机的洗车模式是端洗模式且处于洗车自动控制模式。洗车机响应信号系统发出的“洗车请求”,回复“洗车机就绪”给信号系统,并将“洗车机就绪”保持在高电平,直到每一列车的清洗过程完成为止。信号系统收到“洗车机就绪”后,列车进入洗车机,“洗车请求”变为低电平。列车自动监控系统(ATS)将根据时刻表触发进路。
在信号系统接收到“洗车机就绪”后,信号系统将根据从洗车机处获取的预先配置的速度值作为临时限速,可配置的值应符合洗车机的规范要求。在洗车机区域的列车运行速度值,即列车自动运行(ATO)限速,要求为4~5km/h,因此信号系统将运用7~8km/h的临时限速,即列车自动防护(ATP)限速。
当列车开始进入洗车机区域且被洗车机检测到,洗车机开始工作,同时发送“洗车进行中”状态给信号系统。
列车进入洗车机后,在全自动运行模式(FAM)下信号系统控制列车在每一个设定的停车点停车。洗车机系统需要确定列车停准在正确的位置上。因此,仅当洗车机检测到列车停准在正确的位置上时,洗车机发送“零速请求”给信号系统,信号系统需要响应洗车机的请求在洗车机区域施加零速限制,同时发送“零速施加”状态信息给洗车机。
当收到保证列车不会移动的“零速施加”状态信息后,洗车机启动洗车程序。洗车机清洗列车的头部,当清洗完成且洗车机刷头移开后,洗车机移除发送给信号的“零速请求”。
当信号系统收到“零速请求”移除后,信号系统移除“零速施加”,移除洗车机区域的零速限制,同时恢复洗车机区域的临时限速。
在洗车机完成列车头部的清洗后,信号系统控制列车移动至第二停车点停车,并且停准在规定的位置(尾端清洗位置),仅当洗车机检测到列车停准在正确的位置上时,洗车机发送“零速请求”给信号系统,信号系统需要响应洗车机的请求在洗车机区域施加零速限制,同時发送“零速施加”状态信息给洗车机。
当洗车机收到“零速施加”状态信息,洗车机清洗列车的尾端。当清洗完成后,洗车机的刷头移开,洗车机移除发送给信号的“零速请求”命令,当信号系统收到“零速请求”移除后,信号系统设置返回洗车机入口方向的进路。
在列车清洗完成后,洗车机移除发送给信号系统的“洗车进行中”,信号系统移除临时限速。
2.1.2 自动非端洗模式
由于自动非端洗模式的洗车作业的大部分过程与自动端洗模式类似,主要区别在于清洗范围和停车次数不同,所以仅结合作业顺序进行说明。
列车停稳在洗车库前停车点后,信号系统和洗车机的接口交互过程与自动端洗模式相同,洗车时列车限速和实际运行速度也与自动端洗模式相同。
当列车进入洗车机后,与自动端洗模式不同,自动非端洗模式下不清洗车头和车尾,所以信号系统直接控制列车以低速运行到第二停车点停车。信号系统将设置返回洗车机入口方向的进路。
在列车清洗完成后,洗车机移除发送给信号系统的“洗车进行中”,信号系统移除临时限速。
2.2 手动洗车模式
在手动洗车模式下,洗车机由洗车人员手动控制,不需要任何信号系统提供的信息。信号系统不会收到任何洗车机的信息。FAM模式列车不能进入洗车线。
手动洗车模式的提出取决于洗车机,具体过程如下:
(1)洗车机发送“洗车方式”为手动方式;
(2)洗车机操作员手动操作洗车机;
(3)场调手动排列至终端信号机的调车进路;
(4)司机切换列车至列车自动防护模式(CM)/非限制人工驾驶模式(EUM),按信号显示移动,按场调命令依靠停车牌在第一或第二停车点停车。
(5)进路解锁,场调手动排列出洗车线的调车进路。
(6)洗车机操作员手动关闭洗车机。
2.3 降级洗车模式
每个相关信号子系统为每个洗车步骤设置一个可配置的超时时间。如果在一定时间内下一步骤没有被执行,则系统会产生1个报警信息。
在洗车机故障时,洗车机故障和零速请求将发送至信号系统。在这2种情况下,报警信息将发送至ATS操作员。为简化降级场景,信号系统会提供给场调1个单独的复位命令。该命令将信号和洗车机都重置到初始状态,ATS操作员手动设置1条进路将列车从洗车机中拉出。
需要注意该复位命令在洗车进程故障时使用,但是如果设备发生故障,故障可能仍然存在,场调应通知工程师来处理该故障。
3 自动洗车接口设计
3.1 全自动运行信号系统与洗车机接口结构与设计
全自动运行信号系统与自动洗车功能相关的部分主要是轨旁设备,包括区域列车自动运行(Region Automatic Train Operation,RATO)设备、计算机联锁(Computer Based Interlocking, CBI)设备、目标控制器(Object Controller System,OCS),及接口继电器/可编程逻辑控制器(Programmable Logic Controller,PLC)。
RATO主要处理轨旁非安全控制功能,同时负责与ATS、RATP的通信。CBI是处理进路控制功能的安全关键设备,轨旁外围设备信息均通过OCS与其接口。OCS是全电子化联锁的安全关键输入/输出设备,负责与轨旁外围设备直接接口。继电器/PLC用于处理轨旁外围设备的非安全信息,一方面继电器和外围设备直接连接,另一方面继电器和PLC连接,再由PLC与RATO进行信息交互。
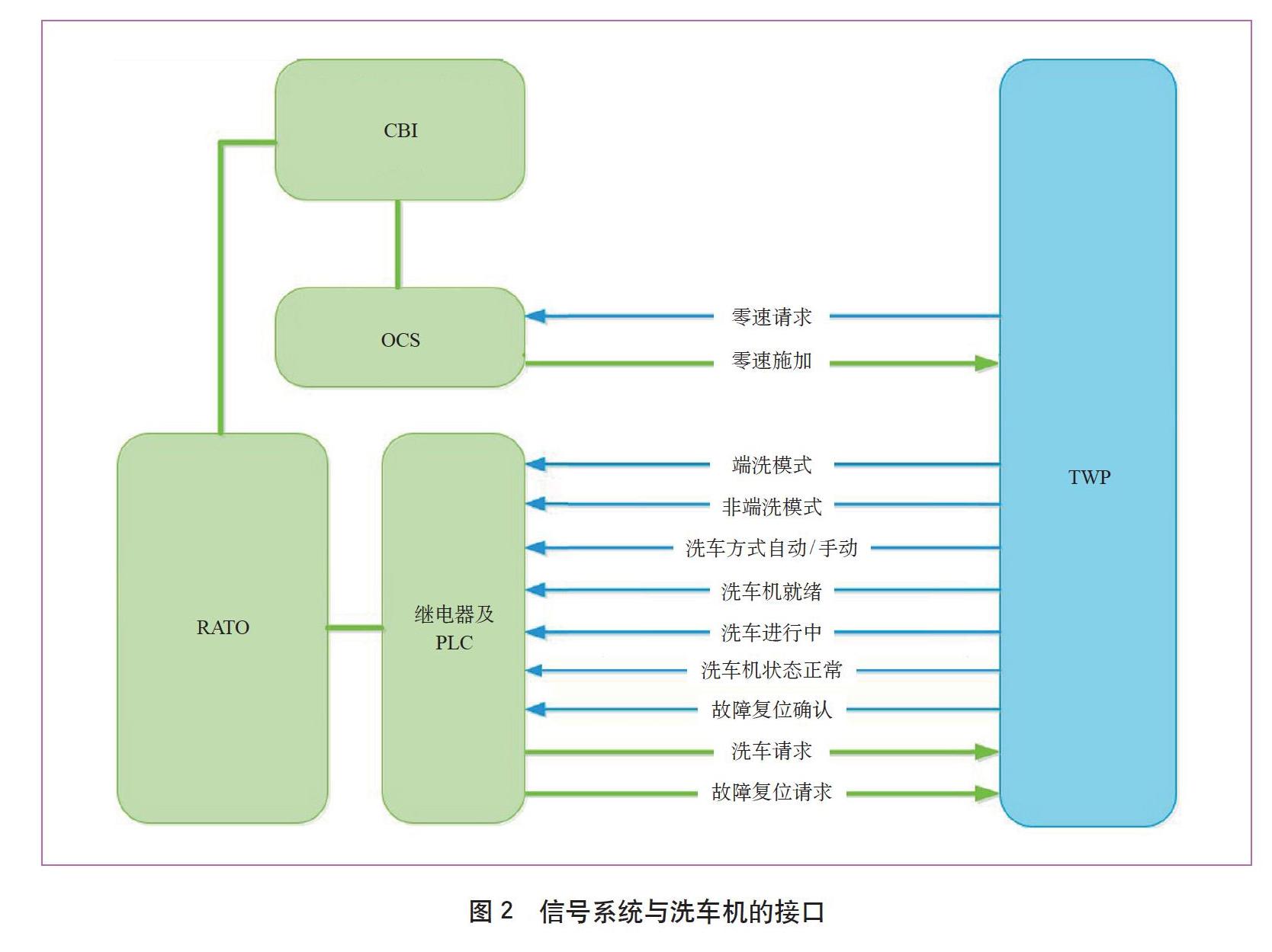
信号系统与洗车机系统的信息交互如图2所示,信号系统与洗车机(Train Wash Plant, TWP)的接口信息分为安全信息和非安全信息。
安全信息采用硬线直连方式,实现洗车机和OCS的接口,主要传输列车零速相关信息。非安全信息采用继电器和PLC共用方式,实现洗车机和RATO的接口,主要传输洗车模式、请求、各类中间状态信息等。
3.2 自动洗车接口信息分析
下面结合自动洗车运营场景,对信号系统与洗车机接口的安全和非安全信息进行详细分析。
3.2.1 安全信息分析
安全信息主要包括“零速请求”和“零速施加”。
(1)“零速请求”是当洗车机不允许列车在洗车区内移动,或者不允许列车进出洗车区时,洗车机激活该信号。信号系统将响应该请求,施加零速限制。正常洗车情况下,当列车停在正确的洗车位置时,该信号将被激活且将开始洗车。
(2)“零速施加”是信号系统在收到洗车机的零速限速请求后将无条件施加零速限制,零速已限制状态信号将通过该信号回送给洗车机。此时相关信号机显示红灯。
3.2.2 非安全信息分析
非安全信息的输入包括端洗模式、非端洗模式、洗车方式自动/手动、洗车机就绪、洗车进行中、洗车机状态正常、故障复位确认;非安全信息的输出包括洗车请求、故障复位请求。
(1)端洗模式是全车(含车头、车尾和车身)清洗的洗车模式,信号系统将根据接收到的这个信号来执行洗车流程。
(2)非端洗模式是仅清洗车身(不含车头及车尾)的洗车模式,信号系统将根据接收到的这个信号来执行洗车流程。
(3)洗车方式自动/手动是指示当前洗车机的控制方式:自动方式是指洗车自动进行,不需要人工干涉,高电平有效;手动方式是默认状态,低电平有效,由现场的洗车员控制洗车,司机手动驾驶列车,该模式下信号系统仅排列入库进路,FAM模式列车无法进入洗车库。
(4)洗车机就绪是指当信号系统有计划进行列车洗车时,发送“洗车请求”给洗车机,洗车机在收到信号系统的“洗车请求”且满足洗車条件时,激活该信号。当洗车机对于计划洗车作业未准备就绪时,如果未收到洗车机准备就绪命令,信号系统不会自动为列车排列至洗车机的进路。
(5)洗车进行中是为ATS系统指示洗车正在进行的状态信息。
(6)洗车机状态正常是洗车状态的概括信息,用于为ATS系统指示洗车机状态。当洗车过程发生需要人工干涉的故障时,如暂停、超时等,洗车机使该信号失活。该失活信号允许操作员确认且当有需要时使用复位命令。
(7)故障复位确认是洗车机在收到信号系统“故障复位请求”后的确认信号,此命令为人工命令。洗车机在清除所有内部状态后重置到初始状态。如果洗车机无法重置,洗车机工作人员确保安全后也能发出此命令,此时安全由人工保证。允许ATS操作员排列进路使列车驶离洗车区。
(8)洗车请求是指当有列车根据时刻表洗车时,信号系统会发送“洗车请求”信号给洗车机,使洗车机初始化。
(9)故障复位请求是操作员在故障状态下发出复位命令使洗车状态回到初始状态,一旦信号系统收到洗车机的回复确认信号,信号系统将重置自己的状态。
4 结语
全自动运行系统的自动洗车功能,依赖于信号系统与洗车机之间的控制接口,通过该接口安全信息和非安全信息的交互,实现自动端洗和非端洗模式,同时支持手动洗车方式以及故障情况下的降级洗车模式。
在接口分析中发现,最为关键的控制点是需要洗车机在准确而可靠地判定列车完全进入洗车位置后向信号系统请求零速,信号系统以此请求为基础才能自动施加零速,确保洗车作业的正常进行,以避免洗车时列车误动损坏洗车设备或刮伤列车外墙。这对洗车机的安全性和可靠性提出更高的要求,对洗车机工艺设备控制逻辑的改进具有一定的指导意义。
此外,寒冷地区的洗车库往往带有库门,自动洗车过程中还需要控制库门的打开和关闭,这就需要在洗车机接口中增加安全信息,即库门的控制命令和状态反馈。
参考文献
[1]中国城市轨道交通协会. 城市轨道交通全自动运行系统技术规范 第1部分:需求规范(征求意见稿)[S]. 北京:中国城市轨道交通协会,2018.
[2]赵晓峰. 胶轮路轨全自动旅客捷运(APM)信号系统研究[J].城市轨道交通研究,2016(增刊2):62-66.
[3]Ivan Wu, Tanarat. Signalling and train wash plant ICD [R]. Changzhou:Bombardier NUG Signalling Solutions Co.,Ltd,2019.
[4]王建文,高洪波. 城市軌道交通全自动停车场车辆自动清洗功能设计与实现[J].铁路计算机应用,2017(9):68-70.
[5]夏季. 全自动驾驶模式下地铁车辆段洗车机技术接口分析[J].现代城市轨道交通,2018(5):21-24.
[6]寇若岚. 全自动运行信号系统与洗车机的接口方案研究[J].铁路通信信号工程技术,2018(10):68-72.
[7]张强,张扬,刘波,等. 城市轨道交通全自动驾驶列检库、洗车库的车库门安全防护方案[J].城市轨道交通研究,2018(1):132-136.
[8]严建鹏. CBTC系统正线信号机显示方案及逻辑实现分析[J].现代城市轨道交通,2015(6):4-8.
[9]吴明,贺观. 跨座式单轨交通信号系统[M].四川成都:西南交通大学出版社,2016.
[10]中国城市轨道交通协会. 轻型跨座式单轨交通设计导则[S]. 北京:中国城市轨道交通协会,2018.
[11]杜时勇,陈华银. 地铁全自动洗车方案研究[J].铁道通信信号,2017(8):62-65.
[12]王晓保,颜燕. 城市轨道交通停车场洗车库内接触网设置研究[J].都市快轨交通,2004(4):55-58.
[13]王玉敏. 地铁车辆自动洗车工艺研究[J].科技创新与应用,2019(30):76-78.
[14]范俊韬,陈智钊,张三多,等. 广佛地铁列车清洗模式优化[J].轨道交通装备与技术,2019(1):33-35.
[15]史文飞,王升福,于洋,等. SJSG型列车自动清洗机控制流程优化研究[J]. 设备管理与维修,2019 (12):125-126.
[16]张明. 全自动运行地铁车辆基地工艺设计研究[J]. 现代城市轨道交通,2018 (5):42-44.
[17] 张小华. 地铁列车洗车机端洗轴的改造研究——以深圳地铁公司列车洗车机为例[J]. 技术与市场,2012 (8):46,48.
[18] 黄志红. 车辆段/停车场增设全自动运行功能的分析[J]. 现代城市轨道交通,2015 (5):4-6.
[19] 樊梁. 南京地铁1号线列车自动清洗机电控系统大修[J]. 哈尔滨铁道科技,2018(1):23-24,27.
[20] 杜时勇,陈华银. 地铁全自动洗车方案研究[J]. 铁道通信信号,2017(8):62-65.
[21] 冯浩楠,黄苏苏,付伟,等. 城市轨道交通全自动运行系统多功能仿真平台设计与实现[J]. 实验技术与管理,2020(1):238-241,249.
收稿日期 2019-11-28
责任编辑 胡姬
Analysis and research on interface between FAO
signaling system and train washing machine
Luo Binlong, Zhao Xiaofeng, Sun Sinan, et al.
Abstract: The realization of automatic train washing function of fully automatic operation system depends on the interface performance between signaling system and train washing machine. Based on the comprehensive analysis of the types of train washing machines, this paper designs and analyzes the interface of mobile mode train washing in detail, describes the cleaning scenarios under the automatic end washing and automatic non-end washing modes, and considers the manual train washing mode and degraded train washing mode, so as to put forward a complete and feasible interface technical scheme.
Keywords: urban rail transit, FAO, signaling system, automatic train washing, interface analysis
猜你喜欢
速读·下旬(2022年4期)2022-07-17
科学家(2021年24期)2021-04-25
电子乐园·下旬刊(2021年3期)2021-02-08
中国应急管理科学(2019年11期)2019-10-30
名城绘(2019年6期)2019-10-21
科技传播(2016年19期)2016-12-27
电子技术与软件工程(2016年22期)2016-12-26
科技创新与应用(2016年34期)2016-12-23
价值工程(2016年30期)2016-11-24
企业技术开发·下旬刊(2016年9期)2016-11-23
