
车载式地铁轨道缺陷巡检系统设计
2020-04-28 12:26廖进吴松荣刘东杨平
现代城市轨道交通 2020年4期
廖进 吴松荣 刘东 杨平

摘 要:提出一种新的车载式地铁轨道缺陷巡检系统,利用机器视觉技术,通过对系统硬件和软件的设计,实现轨道道床空间全断面高清晰成像、检测位置信息获取、轨道缺陷智能识别以及轨道缺陷数据无线传输保存等功能。最后,将该巡检系统应用在广州地铁 8 号线上,试验结果表明,该巡检系统具有定位精准、轨道缺陷检测精确、实时传输和分析的优点,适用于我国地铁轨道缺陷巡检,可有力保障列车安全、可靠运行。
关键词:地铁;智能巡检装置;车载式;轨道缺陷处理;图像识别
中图分类号:U216.3
1研究背景
随着城市规模快速扩大,軌道交通逐渐成为城市客运的一种主要交通工具。修建轨道交通设施的城市大多人口众多,对轨道交通依赖度较高,数分钟的故障延误都将给人们的日常出行带来极大的不便;同时轨道是关乎城市轨道交通运行安全的重要设备之一, 一旦发生轨道故障,将会引发较为严重的行车事故,造成无可挽回的经济损失和社会影响。因此,为保证运营安全,提高城市轨道交通的可用性与安全性,必须加强对轨道状态的及时检查。
目前国内对轨道状态的巡检以人工步行巡检为主,需要消耗大量的人力资源,而且通过人眼观察进行缺陷识别,受人员素质和工作积极性的影响,具有一定的不确定性。个别线路配备了安装在工程车上的自动巡检装置,利用夜间检修时间,在工程车辆的快速行走过程中,对轨道状态进行快速自动检查,但由于工程车辆上线运行须占用线路检修时间,需要提前申请行车点,一般只能每隔1个月或者半个月对线路检查1 次,而轨道线路需要每天巡视检查,该方式只能作为当前人工巡检方式的一个补充,不能达到代替人工巡检的目的。
此外,轨道缺陷的检测手段还有电涡流法和超声波法等。其中:
(1)电涡流法利用轨道探伤仪产生的感应电流检测轨道伤损,但由于检测系统存在高频激励信号,检测信号的处理难度较大,检测速度较慢;
(2)超声波法是应用最多的技术,其探伤探头通过向轨道发射连续的超声波脉冲检测轨道内部伤损。
还有文献提到采用激光传感器检测轨道缺陷,但该方法由于在高速以及列车晃动情况下会导致激光数据误差较大,因此只能用于低速轨道检测车。
以上方法均存在检测速度慢、准确度低及轨道缺陷检测类别单一的缺点。
针对目前轨道缺陷检测效率低及存在干扰时检测准确度低等问题,本文提出一种新的车载式地铁轨道缺陷巡检系统。该系统利用机器视觉技术在车辆运行过程中实时采集轨道道床空间全断面高清晰图像,精确检测列车运行位置以及智能识别轨道缺陷,并将检测出的缺陷信息和位置信息通过无线网络实时发送至巡检系统云服务器,利用云计算技术分析和处理检测数据,便于维修人员及时对缺陷进行评价及处理。
2 系统结构、功能与技术指标
2.1 系统结构
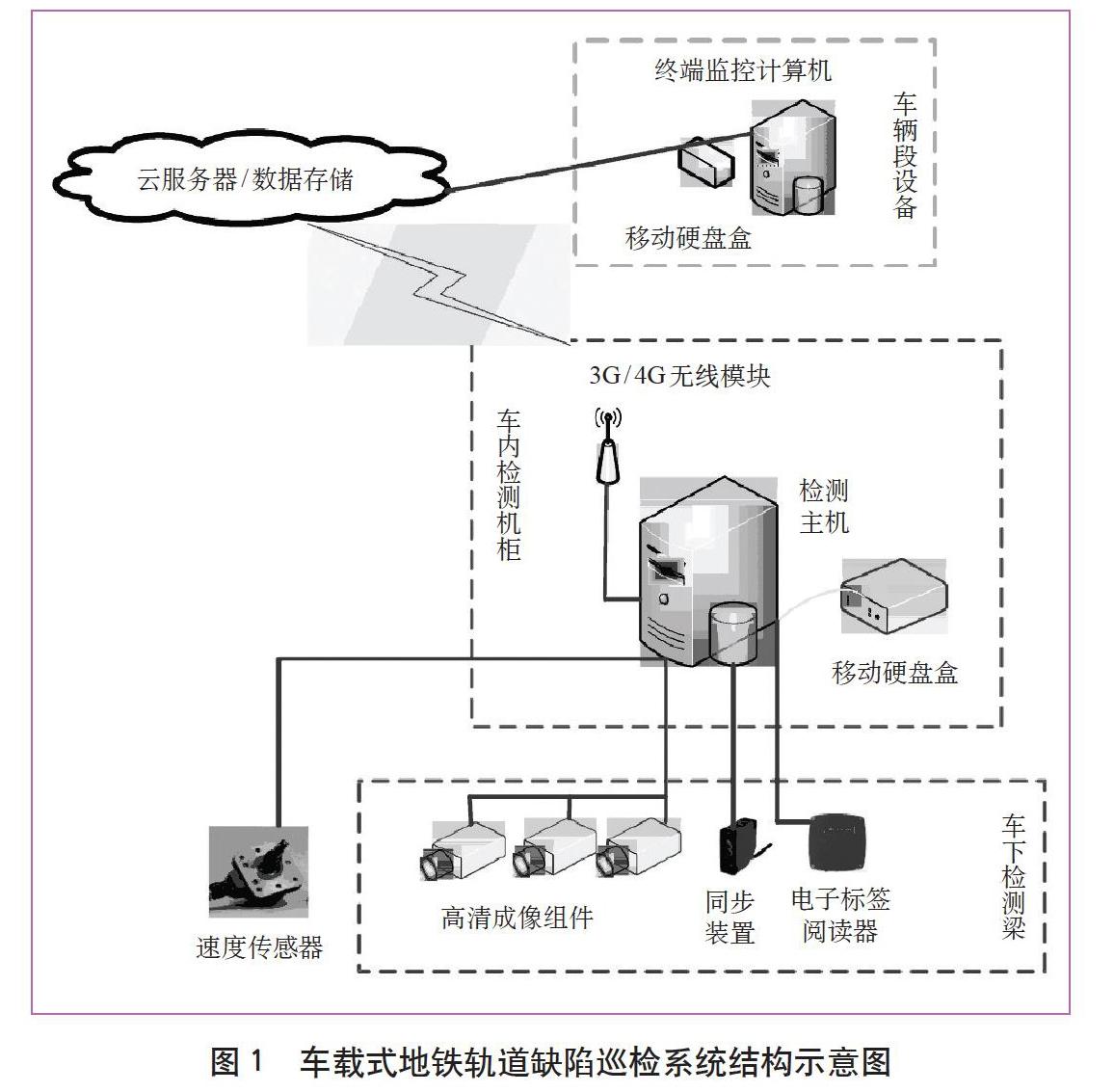
车载式地铁轨道缺陷巡检系统主要由安装在电客车底部的检测梁、安装在车轮轴头上的速度传感器、安装在车内客室座位下的检测机柜、部署在云服务器上的检测数据处理服务器程序和安装在终端监控计算机上的客户端程序等组成,其结构示意图如图1所示。
2.2 系统功能
车载式地铁轨道缺陷巡检系统能在列车最高运行速度为160 km/h的情况下,实时采集轨道道床空间全断面高清晰图像,精确检测列车运行位置,并能对轨道缺陷进行智能识别,将检测出的缺陷信息和位置信息通过无线网络实时发送至巡检系统云服务器进行分析和处理。
该系统主要功能如下。
(1)在电客车走行过程中,实时对轨道及道床进行高清图像采集。
(2)对轨道状态图像进行智能缺陷识别,自动识别的缺陷包括钢轨裂纹及断轨,钢轨扣件断裂、移位及缺失,轨枕裂纹及掉块,道床空间异物入侵,感应板移位。
(3)巡检位置检测,即测量地铁当前走行的位置(公里标),将其作为系统所记录的钢轨缺陷在线路上的坐标信息。
(4)将钢轨缺陷图片的缺陷类型、缺陷位置信息通过无线网络发送至云服务器。
(5)线路上需要重点关注的位置,如道岔等位置的实时图像也可通过无线网络发送至云服务器,便于实时查看设备状态。
(6)将轨道缺陷信息及图片保存至云服务器。
(7)安装在终端监控计算机上的客户端程序可查看缺陷信息,并进行汇总统计,对比分析,形成报表等。
2.3 系统技术指标
车载式地铁轨道缺陷巡检系统缺陷检测类别包括钢轨扣件移位及缺失、钢轨及轨枕裂纹、轨枕破损、道床空间异物入侵、感应板移位、钢轨焊缝等,其技术指标如表1所示。
3 系统硬件及软件设计
3.1 系统硬件设计
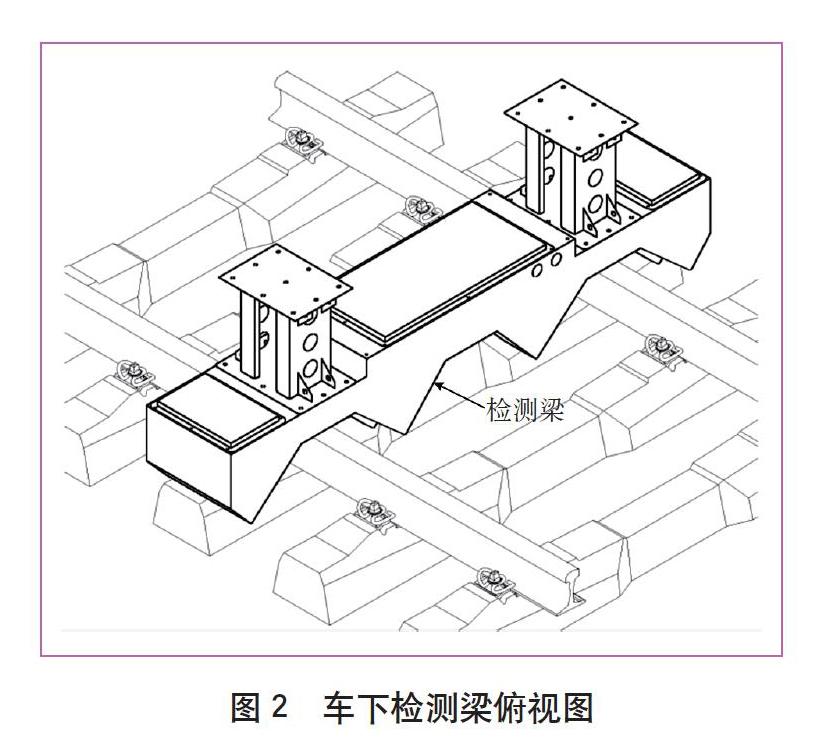
系统的硬件主要包括车下检测梁上的硬件装置以及车内检测机柜内的硬件装置。车下检测梁内布置有对轨道进行成像的高清成像组件、触发高清成像组件进行同步拍照的同步装置,以及读取线路上电子标签的电子标签阅读器。车下检测梁俯视图如图2所示。
车内检测机柜内主要布置有检测主机、3G/4G无线数据传送装置和电源装置等。车内检测机柜的安装位置如图3所示。
下面详细介绍系统硬件各部件。
3.1.1 高清成像组件
高清成像组件用于对轨道区域进行高清成像,在列车高速运行情况下获取轨道清晰图像,安装示意图如图 4所示。
高清成像组件共有6组相机及照明光源组成,如图 4所示。其中4组相机分别从2个侧面拍摄钢轨区域,2 组相机分别从正上方拍摄钢轨中间的道床区域,实现对道床断面的全覆盖。在列车高速行驶时,为了确保每个扣件都能被拍到,且具有高识别率,对扣件检测算法提出了严格要求:通过实测得到2个扣件之间的距离为0.6m,列车按照最高速度120 km/h考量,4 组相机进行扣件检测,从而计算得到每个扣件从采集、预处理到识别的整个过程应保证在4.5 ms内完成。相机参数和频闪LED光源参数设计如下。
(1)相机参数配置。分辨率为2 048×2 048像素,曝光时间为0.02~1 000 ms,最高帧率为223 f/s,接口为双千兆网。
(2)照明光源。采用机器视觉专用频闪LED光源,额定功率为432 W,脉冲宽度为1~1 023 μs,响应时间≤15 μs。
3.1.2 同步装置
同步装置安装在检测梁底部,由高速激光测距传感器、速度传感器、嵌入式同步触发系统,以及相机触发电路组成。其中,嵌入式同步触发系统采用小型单片机系统,参数配置如下:①ATmega328微控制器——16MHz时钟;②2 KB 静态随机存储器(SRAM);③14個数字IO口;④6个模拟量输入口;⑤1个计数器。
高速激光测距传感器对着钢轨外侧道床区域进行测量,参数配置如下:①测量范围为60~2 000 mm;② 响应时间为1 ms;③测量分辨率为1 mm;④激光类型为Ⅰ 类激光;⑤模拟量输出为4~20 mA。
3.1.3 电子标签阅读器
电子标签阅读器采用工业级阅读器(HD Reader),是一种能远距离识别ID标签卡的射频识别设备(RFID),机械和电子部分具有非常好的坚固耐用性,适用于恶劣环境,具有防喷射水、防尘及抵御其他恶劣环境条件的结构保护,可在400 km/h速度下准确识别线路上的电子标签信息。电子标签阅读器布置在检测梁中部下方,在线路上
每1km布置1个,用于在列车运行过程中感应线路上电子标签位置,对运行里程进行校准。缺陷检测位置定位原理如图5所示。
各部分功能如下。
(1)速度传感器。输出距离脉冲,车轮每转动1周输出80脉冲。
(2)轨枕感应传感器。通过快速光电测量判断轨枕位置。
(3)同步触发控制器。根据距离脉冲计算走行距离后传输给检测主机,并结合走行距离信息和轨枕感应传感器输出的轨枕信息判断轨枕位置,在轨枕位置处触发控制6组相机同步采集轨道图像。
3.1.4 检测主机
检测主机用于图像的智能识别、检测结果的保存及发送。检测主机采用车载准用紧凑式工业服务器,参数配置如下:①E2400 32核CPU;②32G内存;③MSI1080ti独立显卡;④256 G固态硬盘;⑤2T可拔插式硬盘盒;⑥15个千兆网口。
3.1.5 无线数据传输装置
检测结果通过布置在车内检测机柜内的工业4G路由器传输至云服务器,也可通过车内多网融合系统进行传输。
3.1.6 电源装置
检测装置的电源由车辆系统提供的DC110V和AC220V两路电源供给。在线路正常运行过程中由AC220V供电,在车辆停止运行降弓后由DC110V电源逆变为AC220V电源用于系统关机。
3.2 系统软件设计
系统软件的工作流程如图6所示,主要包括检测位置信息获取、信息采集(包括同步触发装置和高清成像)、轨道缺陷智能识别以及轨道缺陷数据无线传输保存等,详细分析如下。
3.2.1 检测位置信息获取
地铁上电运行后,巡检系统获电启动。车辆运行后,通过速度传感器输出的距离脉冲,计算出列车走行里程。通过获取线路上的电子标签信息和列车TCMS信息对检测位置进行校准。
3.2.2 同步触发装置
车辆启动走行后,同步触发系统通过计数器端口读取距离脉冲,并开始通过模拟量输入端口测量检测梁安装位置距道床区域的高度。当走行到轨枕位置时,由于轨枕具有一定的高度,而且上面安装有扣件等部件,测量高度会出现阶跃性变化,同步触发系统根据高度变化判断当前位置是否为轨枕位置。为避免道床上其他随机出现的凸起设施对测量造成干扰,系统还结合由速度脉冲计算出的走行距离进行综合判断。
同步触发系统确认为轨枕位置后,通过系统IO口驱动触发电路,即触发高清成像组件各相机同步进行拍摄。
3.2.3 高清成像
高清成像组件由同步触发装置输出的同步信号驱动,同步拍摄轨道区域的图像;照明光源在拍摄时同步发光,为相机提供照明。各相机采集的高清图片通过千兆以太网发送至车内检测机柜内的检测主机进行分析与处理。
3.2.4 轨道缺陷智能识别
车内检测主机通过高清成像组件传输的轨道图像进行图像智能分析,实时识别出扣件缺陷、轨道异物、轨枕缺陷、钢轨缺陷、感应板移位等信息。
3.2.5 轨道缺陷数据无线传输保存
检测装置在运行过程中智能识别到的轨道缺陷,包括缺陷图片、运行位置、时间、车次等信息,实时通过车载无线网络发送至云服务器保存,并实时推送至车辆段终端监控计算机,通过客户端软件界面可实时显示和查看缺陷信息。
4 系统验证
为更好地验证所提出的车载式地铁轨道缺陷巡检系统的性能,自2018年8月开始在广州地铁8号线正式使用该地铁轨道缺陷巡检系统,每天随编号为169170车辆巡视检查轨道,截至2019年3月系统共查出1 615处缺陷(含重复),其中扣件缺陷1 310处,轨枕破损290处,道床异物15处。轨道缺陷样例如图7所示,经验证检出率为100%。
检测出的缺陷信息和位置信息通过无线网络实时发送至巡检系统云服务器,工作人员利用云计算技术分析和处理检测数据(图8),可以实时了解轨道缺陷位置和缺陷种类。
5 结束语
本文设计了一种车载式地铁轨道缺陷巡检系统,系统主要由检测梁、速度传感器、检测机柜、检测数据处理服务器程序和客户端程序等组成。该系统利用机器视觉技术在车辆运行过程中实时采集轨道道床空间全断面高清晰图像,精确检测列车运行位置以及智能识别轨道缺陷,并通过无线网络实时将检测出的缺陷信息和位置信息发送至巡检系统云服务器。最后,以广州地铁8号线为例,证明了该系统具有定位精准、轨道缺陷检测率精确、实时传输和分析的优点,并验证了该方案可行,适用于我国轨道缺陷巡检,可有力保障列车安全、可靠运行。
參考文献
[1]韩强,任盛伟,戴鹏,等.轨道状态巡检系统[J].铁路技术创新,2012(1):8-50.
[2]胡春雄,布春明,李海峰.智能巡检系统在线路运行中的应用[J].山西电力,2006(135):29-30,34.
[3]中国城市轨道交通协会.城市轨道交通2016年度统计和分析报告[J].城市轨道交通,2017(1):20-36.
[4]L. Li,B. P. Y. Loo. Railway development and air patronage in China,1993-2012:implication for low-carbon transport[J]. Journal of Regional Science,2017,57(3):507-522.
[5]赵泽霖.高速轨道电力巡检系统设计与实现[D].四川成都:电子科技大学,2015.
[6]Bo Wang, Zihua Li, Xiaoyu Li. Safety analysis of world railway passengers transport based on accident statistics[J]. Railway Quality Control,2016(10):11.
[7]黄海军,张飞龙.浅谈轨道巡检系统在城市轨道交通的应用[J].山东工业技术,2017(22):112.
[8]韩强,戴鹏,谭松,等.车载轨道巡检系统研制[J].铁道建筑,2014(11):144-147.
[9]许贵阳,史天运,任盛伟,等.基于计算机视觉的车载轨道巡检系统研制[J].中国铁道科学,2013,34(1):139-144.
[10] 马晓明.轨检车车载轨道状态巡检技术及应用[J].现代商贸工业,2018,39(18):181-183.
[11] Maneesha Singh, Sameer Singh, Jay Jaiswal, et al. Autonomous rail track inspection using vision based system[C]//International conference on computational intelligence for homeland security and personal safety. Virginia,2006:56-59.
[12] 刘泽,卢迎飞,孙秀芳.电磁钢轨探伤提离补偿方法研究[J].北京理工大学学报,2013,33(3):249-253.
[13] 翟千雅.基于计算机视觉技术的铁路轨道表面缺陷分类检测研究[D].甘肃兰州:兰州交通大学,2017.
[14] 祝连庆,孙军华,董明利,等.钢轨高速探伤系统的研究[J].仪器仪表学报,2002(S1):119-121.
[15] 祝连庆,董明利,孙军华.钢轨高速探伤检测系统中的伤损分析[J].仪器仪表学报,2003(S1):222-224.
[16] 贾文晶.基于红外图像处理的钢轨裂纹检测研究[D].甘肃兰州:兰州交通大学,2017.
[17] 顾桂梅,刘丽,贾文晶.一种钢轨裂纹红外图像处理算法研究[J].铁道学报,2018,40(11):129-133.
[18] 俞炳杰.轨道不平顺检测系统优化设计[J].现代城市轨道交通,2019(5):43-47.
[19] 任崇巍.基于双边滤波和Retinex算法的货车图像预处理方法[J].现代城市轨道交通,2019(6):39-43.
[20] 王琰,王昊,石熠.城市轨道交通搭载式轨道几何检测系统[J].现代城市轨道交通,2019(8):59-62.
[21] 杜茂金. 轨检车在地铁轨道设备养修中的运用[J].现代城市轨道交通,2009(4):72-74.
[22] 梁罗伟. 地铁轨道设备养修中轨检车的运用探讨[J].商品与质量,2019(16):160.
收稿日期 2019-06-15
责任编辑 党选丽
Design of on-board inspection system for subway track defects
Liao Jin, Wu Songrong, Liu Dong, et al.
Abstract: This paper proposes a new on-board subway track defect inspection system. By using machine vision technology and the design of the hardware and software of the system, it realizes the functions of full section high-definition imaging of track bed space, acquisition of inspection position information, intelligent identification of track defects and wireless transmission and storage of track defect data. In the conclusion, the inspection system is used on Guangzhou metro line 8, and the test results show that the inspection system has the advantages of accurate positioning, accurate inspection rate of track defects, real-time transmission and analysis. It is suitable for the inspection of track defects in China and effectively guarantees the safe and reliable operation of trains.
Keywords: subway, intelligent inspection device, on-board, track defect processing, image recognition
猜你喜欢
科学家(2021年24期)2021-04-25
学苑创造·B版(2021年2期)2021-03-15
诗潮(2019年1期)2019-01-25
小学阅读指南·高年级版(2016年1期)2016-09-10
科技致富向导(2013年8期)2013-05-30
现代计算机(2009年9期)2009-12-02
微电脑世界(2009年10期)2009-11-02
