高效能源系统管理与控制技术
2020-04-27 14:20:46董宝磊吴春瑜何小斌
上海航天 2020年2期
董宝磊,刘 涛,王 霄,吴春瑜,黄 军,何小斌
(上海空间电源研究所,上海 200245)
0 引言
能源系统是不调节母线大功率飞行器的关键技术之一,通常采用太阳能电池与储能电池组合能源模式,白天太阳电池把光能转化为电能,并在为推进系统和载荷提供连续电能的同时,对储能电池进行充电。夜晚储能电池为推进系统和载荷供电,实现能量产生、存储和消耗间的动态平衡,从而满足飞行器长期驻空对循环能源需求[1-5]。
飞行器能源系统性能的优劣对飞行器能否正常飞行及实现预定任务有重要影响。飞行器能源系统由多个能源单元组成,各能源单元既相互独立,又相互耦合影响。因此,加强能源系统管理与控制技术研究,实现能源系统的全局优化控制及高效传输十分有必要[6-9]。
美国、日本、瑞士等国家已分别开展了以太阳能作为能源的低空飞行器计划。国外具有代表性的是美国的循环能源系统动力飞行器HALE-D,其能源系统采用常规的太阳电池阵、储能电池组及能源管理器的设计架构,太阳能电池阵功率为15 kW,锂离子电池为40 kWh;其能源管理器在技术上继承了空间飞行器的电源设计方案,其控制只是采用了简单的逻辑切换控制,未能适应飞行器对高效集成化能源管理系统的需求[10]。
国内的诸多高校院所针对不调节母线大功率飞行器的能源管理问题也开展了很多有益的探索。能源系统采用常规的太阳能电池与储能电池组合的能源模式,采用了不调节母线的形式,动力载荷及平台载荷直接由母线供电。为最大限度利用太阳电池阵的发电能力,功率传输采用了最大功率点跟踪(Maximum Power Point Tracking,MPPT)控制方式,大大减小了太阳电池阵设计尺寸和重量;同时可以减小蓄电池组放电深度,在相同放电深度下可减轻蓄电池组重量,实现飞行器能源的轻质高效设计。国内能源管理与控制技术的研究水平已经达到了国际领先水平,但是采用的MPPT控制策略未考虑百千瓦级大容量储能电池组接近满电时的充电功率优化及全局优化控制问题[11-12]。
本文结合分布式能源拓扑架构,介绍了一种集逐级调压控制、限流充电控制、恒流输出控制以及MPPT控制为一体的层级梯次控制策略,实现分布式系统的全局优化控制和飞行器能源的功率优化调度。
1 总体方案
飞行器能源系统通常采用太阳电池和储能电池联合供电的分布式能源系统架构以及MPPT控制策略,为每个太阳电池阵配备独立的MPPT优化器,保证每个太阳电池阵工作在各自的峰值功率点,以提高太阳电池阵的能量利用率和系统的发电能力。
本文飞行器能源采用不调节母线方式,太阳电池发出的能量经过MPPT优化器跟蓄电池相连后直接为负载供电,保证太阳电池产生的能量得到最大限度的利用,能量的传输损耗最小。其与半调节母线、全调节母线相比,减少了充电单元和放电单元环节的损耗,能量传输效率更高。飞行器的最大载荷是推进电机,能适应宽范围的电压输入。分布式能源系统总体方案如图1所示。
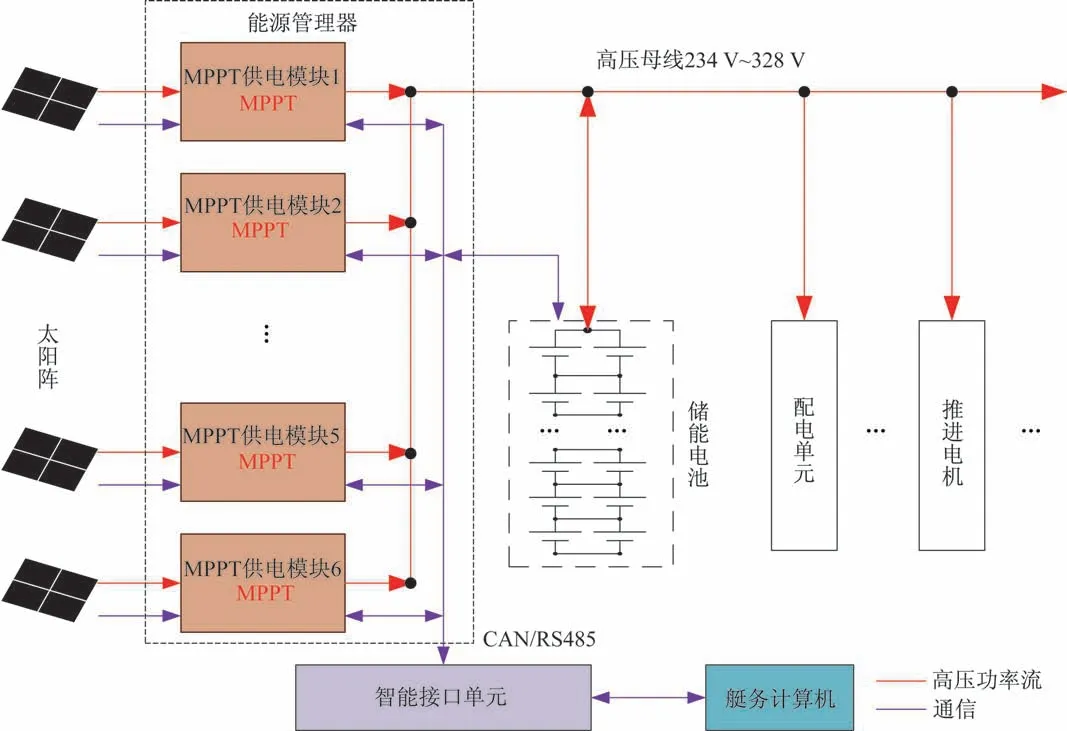
图1 分布式能源系统总体方案Fig.1 Overall scheme of distributed energy system
本文设计的分布式能源系统架构具备以下几个特点:1)太阳电池阵共分12路,常值输出功率为15 kW,峰值输出功率共18 kW;2)储能蓄电池组工作电压范围234~328 V,采用90串28并设计形式;3)能源管理器由6个MPPT供电模块并联组成,每个模块包含2路MPPT电路,每路对应1个太阳电池阵,单路额定功率1.25 kW,峰值功率1.5 kW,实时跟踪太阳电池阵最大功率点,充分利用太阳电池阵的能量;4)能源管理器包含1个智能接口单元,采集能源系统的状态信息,实现与艇务计算机的交互通信。
能源管理器是飞行器能源系统实现控制管理的核心,其主要功能是对飞行器的能源进行合理有效的分配和管理。能源系统工作模式的多样化,主要表现为能源管理器的多模式控制策略。
能源系统通常只具备MPPT跟踪、恒压充电、储能蓄电池独立放电等3个工作模式:1)MPPT跟踪模式。光照期,当蓄电池组电压低于设定电压点时,系统进入MPPT跟踪模式;若太阳电池阵功率大于负载功率,多余能量为蓄电池组充电;若太阳电池阵功率小于负载功率,不足能量由蓄电池组放电补充。2)浮充模式。光照期时,太阳阵最大输出功率大于负载和蓄电池的总需求,蓄电池组电压达到最高电压点时,对蓄电池组进行浮充。3)蓄电池组独立放电。阴影期,太阳阵的输出功率为零,负载所需的功率全部由蓄电池提供。
能源系统的常规控制策略,存在以下两个主要缺陷:1)浮充模式无限流。能源系统常规控制策略决定了只能单一控制充电电压或电流,不可能同时控制两个量。能源系统接近浮充工作模式时,蓄电池组充电电流依然很大;而且能源系统进入浮充模式后,由于充电电路线损的存在,蓄电池组充电电流值虽然慢慢减小,但是减小速度很慢。蓄电池组接近满电状态时,依然有很大的充电电流,容易引起蓄电池组不均衡、过充、过温等问题,还会影响蓄电池组使用寿命。2)MPPT模式下充电电流不可控。MPPT模式下,太阳电池阵发出的能量除了给载荷供电外,其余能量全部用来充电。如果光照条件较好,太阳电池阵发出的能量超过预期,或者由于负载功率较小导致充电电流过大,也会给能源管理器或蓄电池组造成不必要的损伤。尤其是飞行器能源系统功率等级越来越高,这种情况的影响就愈大。
因此,本文针对能源系统的常规控制策略的缺陷,提出一种集逐级调压控制、限流充电控制、恒流输出控制以及MPPT控制为一体的层级梯次控制策略,实现分布式系统的全局优化控制和飞行器能源的功率优化调度。
2 控制策略设计
本文提出的层级梯次控制策略框图如图2所示,层级梯次控制策略以MPPT模式为核心,通过检测能源系统的状态信息,并结合各模式的工作条件自主完成模式切换,实现飞行器能源的功率优化调度。
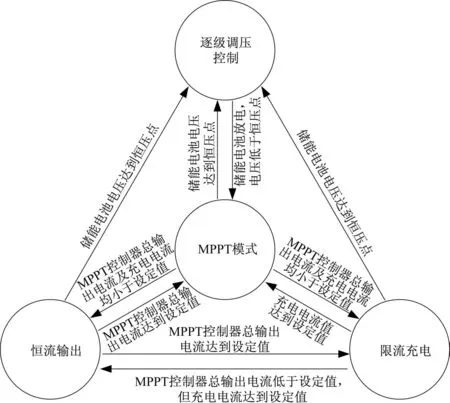
图2 层级梯次控制策略框图Fig.2 Block diagram of hierarchical control strategy
2.1 MPPT模式
能源系统在MPPT模式下存在两种工作状态:1)MPPT跟踪、蓄电池组充电模式。光照期时,太阳阵最大输出功率大于负载且小于负载和蓄电池充电功率的总需求时,系统进入MPPT充电模式,功率调节器处于MPPT跟踪状态,太阳电池阵工作在最大功率点,太阳电池阵提供全部负载功率,剩余能量为蓄电池组充电。2)MPPT跟踪、蓄电池组放电模式。光照不足时,太阳阵的输出功率小于负载需求时,太阳电池阵和蓄电池组共同为负载提供功率,功率调节器处于MPPT跟踪状态,不足功率由蓄电池组进行补充放电,太阳电池阵工作在最大功率点。以上两种状态下,能源管理器均工作在MPPT模式,为能源系统状态控制的核心。
本文采用交错扰动法作为MPPT算法方案,其核心思想是“欲右先左、欲上先下”。假设采集到的电压信号为V,那么扰动电压信号使得电压信号变为0.97 V,这个比例是可调节的,电流信号也相应有所变化,其趋势是向后一小步向前一大步(相对于太阳阵的最大功率点),即电压电流的变化使得太阳阵的工作点向最大功率点靠近,因此,经过数次扰动,系统会较快地找到最大功率点。
基于电压电流的扰动思想,本文进行了MPPT算法的电路设计,如何实现电压电流交错扰动是算法实现的关键,MPPT算法电路包含5个模块:电压扰动电路(N1)、电流扰动电路(N2)、复位电路(N3)、逻辑控制电路(N4)、Pi调节电路(Proportional Integral Controller)(N5),如图3所示。图中,V1为太阳电池阵电压的采样值,I1为太阳电池阵电流的采样值,I2为功率调节电路的电流采样值,Vreset为电压扰动电路的输出值,Vset为电流扰动电路的输出值,Vmppt_ref为逻辑控制电路的输出值。
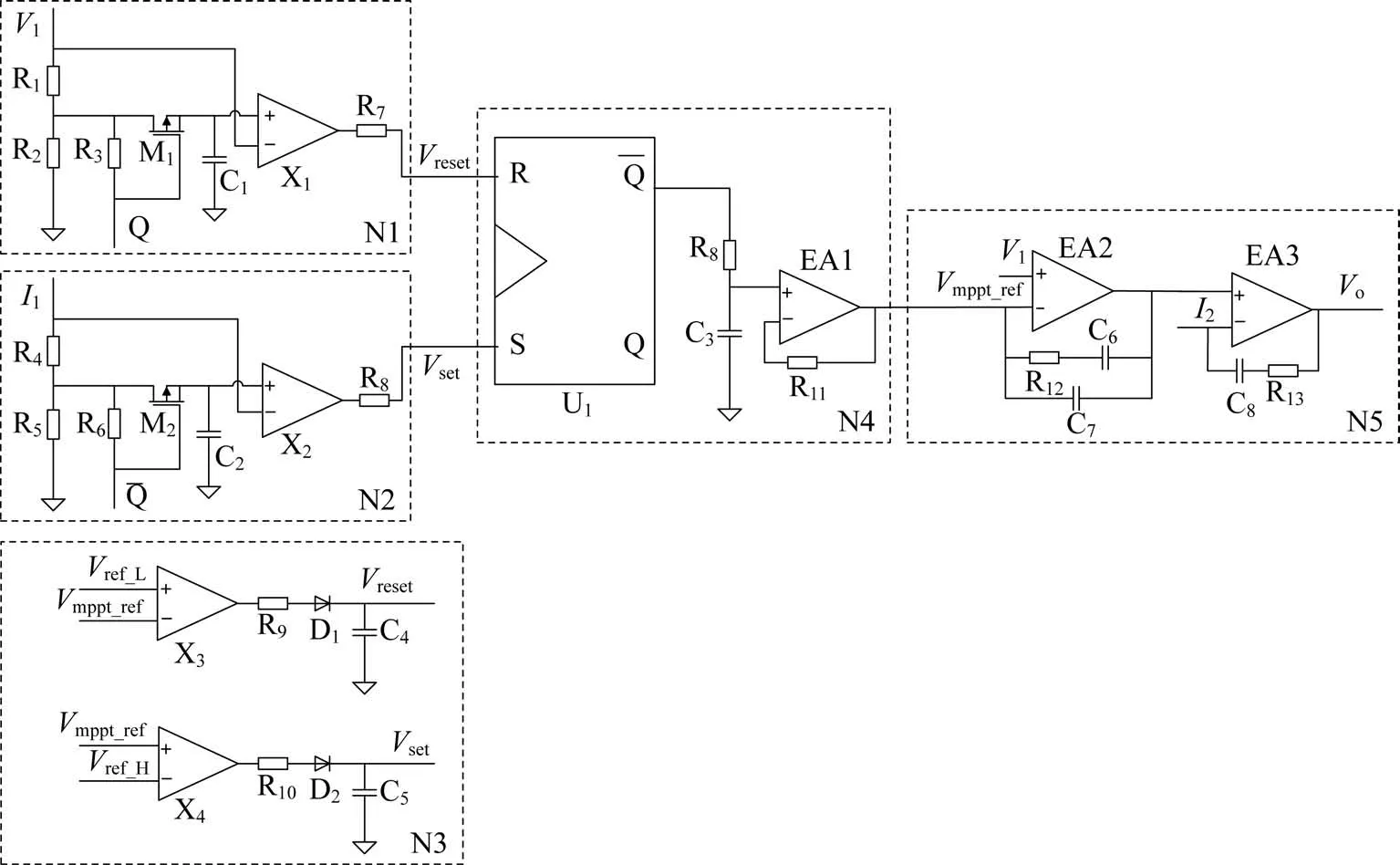
图3 MPPT算法电路Fig.3 MPPT algorithm circuit
交错扰动法简单可靠,鲁棒性好,追踪速度快,容易用硬件电路来实现。
能源系统在一定条件下可从MPPT模式转换为另外3种工作模式:1)当母线电压达到设定值时,能源系统转为逐级调压控制模式,限制充电电压和电流;2)当母线电流达到设定值时,能源系统转为恒流输出模式,限制能源管理器的输出功率;3)当母线电流与负载电流的差,即充电电流值达到设定值时,能源系统转为限流充电模式,限制充电电流。
2.2 逐级调压控制模式
能源管理器功率输出接口与储能电池组功率接口通过线缆直接相连,能源管理器与蓄电池连接示意图如图4所示。一般线缆上的阻抗很小(毫欧级),能源管理器输出电压V1和储能蓄电池电压V2满足

式中:I为充电电流。一般能源管理器只设置恒压充电模式,即V1固定一个最高电压值,当V2足够接近V1时,充电电流I才能逐渐减小。

图4 能源管理器与蓄电池连接示意图Fig.4 Schematic diagram of energy manager and battery connection
当能源管理器以MPPT模式充电,且电压值V1接近恒压点时,蓄电池组的充电电流依然很大,为了解决这个问题,本文提出了逐级调压控制模式,即能源管理器恒压控制点V1不再是一个固定值,而是随着控制策略的变化随动改变,从而改变充电电流值。逐级调压控制流程图如图5所示。
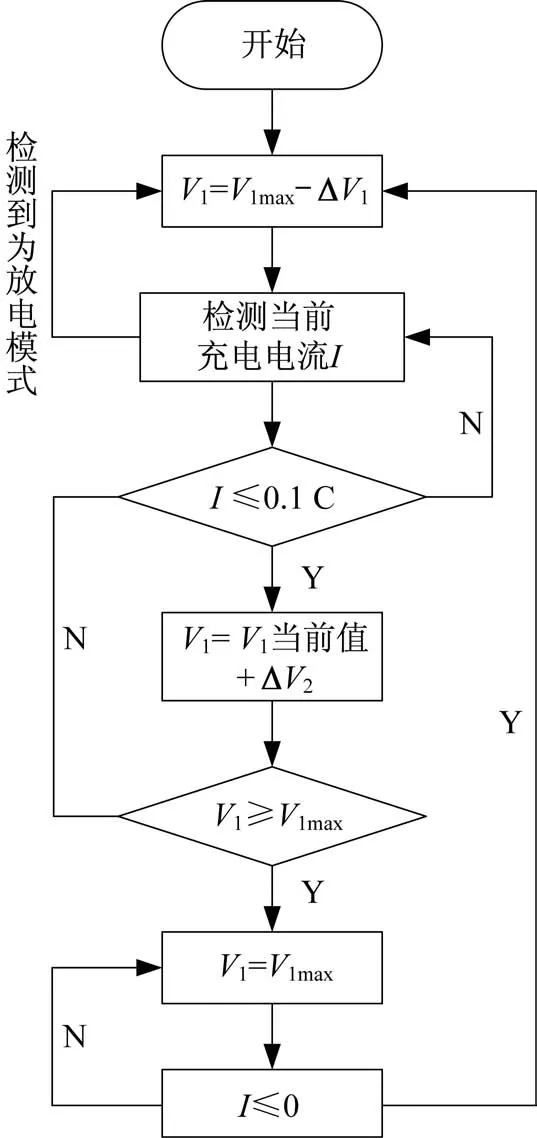
图5 逐级调压控制流程图Fig.5 Flow chart of step by step voltage regulation control
假设储能蓄电池组最高可达到的电压值为V1max,ΔV1和ΔV2是可调微小变量。设置能源管理器输出电压值V1初始量为V1max-ΔV1,结合能源管理器与储能电池组连接线缆阻抗R,合理设置ΔV1,确保恒压点为V1max-ΔV1时的充电电流在0.1 C(蓄电池组容量的1/10)左右。检测当前充电电流值I,当I小于0.1 C时,主动设置恒压点在当前值的基础上增加ΔV2,然后依次恒压点充电,直至充电电流小于0.1 C后,再次调整恒压点。以此类推,直至恒压点V1达到V1max。蓄电池电压达到V1max后,如果充电电流值为0或者检测到蓄电池组放电,立刻将恒压点初始化,即设置为V1max-ΔV1,以保证新的恒压充电循环正常工作。逐级调压控制策略解决了蓄电池组电压浮充时充电电流很大的难题,避免了蓄电池组可能发生的过充、过温等问题,有效延长了蓄电池组的使用寿命。能源系统在逐级调压控制策略下,蓄电池处于接近满电或者满电状态,只有蓄电池组放电才能改变其状态,而蓄电池放电,能源系统即转为MPPT状态。因此,逐级调压控制模式,只能转为MPPT模式。
2.3 限流充电模式
能源系统充电电流达到设定值时,即转入限流充电模式。由于MPPT供电电路输出电流可能既包含充电电流又包含负载供电电流,因此,不可能像恒压充电那样通过蓄电池充电电流采样进行统一控制。另外,蓄电池组充、放电电流方向不一致,对其进行电流采样并直接用于充电恒流控制也较为困难。本文采用了总负载电流各自限流的方法,即以Iout作为每路MPPT供电电路输出的最大电流:

式中:IL为负载电流;ICmax为蓄电池组充电电流上限值;n为MPPT供电电路的路数。
本文研制的能源管理器,ICmax的值为50 A,n是12路,以此动态控制各MPPT电路的电流输出,确保在不影响负载供电的前提下,限制充电电流。限流充电控制框图如图6所示。

图6 限流充电控制框图Fig.6 Block diagram of current limiting charging control
对于每路MPPT供电电路,其输出电流最大(按照整机最大18 kW)为6.25 A,因此,选用10 A霍尔电流传感器对其进行输出电流采样,霍尔输出电压VHALL,Iout与检测电流Iout的线性关系为VHALL,Iout=0.4Iout。对该电压再进行分压,并与利用加法电路以及电阻分压得到的恒流充电动态参考值共同组成恒流充电PI控制环,最终实现以总负载电流各自限流的方法达到恒流充电目的。
能源系统在一定条件下可从限流充电模式转换为另外3种工作模式:1)当母线电压采样达到设定值时,能源系统转为逐级调压控制模式,限制充电电压和电流;2)当母线电流采样达到设定值时,能源系统转为恒流输出模式,限制能源管理器的输出功率;3)当母线电流采样与充电电流均小于设定值,母线电压未达到设定值时,能源系统转为MPPT模式。
2.4 恒流输出模式
能源系统的全局优化控制,需要各单机互相配合协同工作。太阳电池阵发出的功率需要跟MPPT供电电路相匹配,然而飞行器太阳电池阵临空条件决定了其峰值功率只可能是瞬间或者短时功率,因此,无需按照峰值功率设计MPPT供电电路。但是,为了防止峰值功率对MPPT供电电路造成损坏,需要限制太阳电池阵发出的最大功率。限流充电模式下,能源管理器只限制了充电电流,并不能限制MPPT供电电路的输出电流,而且限流充电值远小于MPPT供电电路可能的最大输出电流。
本文采用了MPPT供电电路恒流输出控制模式,当MPPT供电电路输出电流达到设定值时,限制其输出电流,从而达到限制太阳电池阵输出功率的目的。恒流输出控制框图如图7所示。
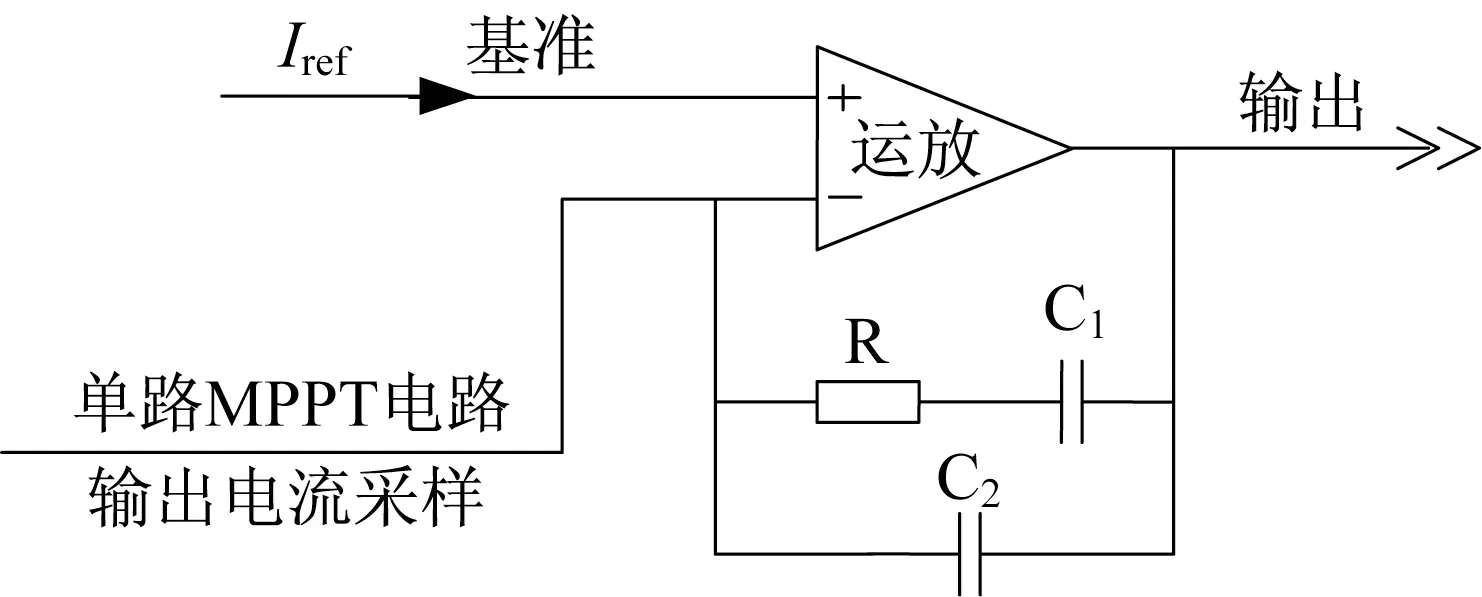
图7 恒流输出控制框图Fig.7 Block diagram of constant current output control
能源系统在一定条件下也可从恒流输出模式转换为另外3种工作模式,转换过程类似于限流充电转换过程,本文不再详述。
3 实验结果与分析
通过以上研究最终研制完成了飞行器15 kW能源管理器样机,能源管理系统(Power Control Unite,PCU)共有8个模块,包含1个PIU模块、6个MPPT功率模块和1个功率分配模块。图8为能源管理器样机实物图。

图8 能源管理器样机实物图Fig.8 Physical picture of energy manager prototype
能源管理器效率曲线如图9所示,满载效率≥97%。能源管理器质量不大于20 kg,比功率大于750 W/kg,满足高比功率的要求。

图9 能源管理器效率曲线Fig.9 Efficiency curves of energy manager
图10为能源管理器母线动态响应测试图。当负载发生突变时,能源管理器能够在较短的时间内恢复母线电压的稳定,动态响应测试性能良好。图10(a)中,绿色为母线纹波(峰-峰值200 mV),黄色为负载电流(7 A→9 A);图10(b)中,绿色为母线纹波(峰-峰值184 mV),黄色为负载电流(9 A→7 A)。

图10 能源管理器母线动态响应测试图Fig.10 Test patterns for the dynamic responses of energy manager bus
4 结束语
本文针对飞行器能源系统管理与控制技术进行了研究,主要以实现分布式能源系统的全局优化控制为目的,研究了一种集逐级调压控制、限流充电控制、恒流输出控制以及MPPT控制为一体的层级梯次控制策略,极大地改善了飞行器能源的功率优化调度能力,适应了飞行器工矿复杂多变的应用需求。本文研制的15 kW的PCU工程样机,实验结果表明具有良好的性能及较高的重量比功率,为不调节母线大功率飞行器提供高效集成化能源管理系统。本文采用了常规的模拟电路来实现控制策略的验证,限制了控制策略发挥其最大性能,同时又限制了能源管理器功率密度的提升。后续工作将考虑采用数字控制及宽禁带功率器件来改善此控制策略的性能。
猜你喜欢
电脑爱好者(2020年10期)2020-07-28 17:10:30
数码世界(2018年2期)2018-12-21 21:23:46
单片机与嵌入式系统应用(2017年8期)2017-04-17 16:30:50
电脑知识与技术(2016年24期)2016-11-14 02:23:35
广西电力(2016年5期)2016-07-10 09:16:44
云南师范大学学报(自然科学版)(2015年5期)2015-12-26 12:46:14
电源技术(2015年5期)2015-08-22 11:18:12
电源技术(2015年7期)2015-08-22 08:49:00
电源技术(2015年12期)2015-08-21 08:58:58
中国高新技术企业(2015年14期)2015-04-29 20:05:29