一种小型化X波段电子侦察系统的设计
2020-04-27 10:10:56尹红波张得才
舰船电子对抗 2020年1期
李 亮,尹红波,管 飞,张得才,陈 坤
(中国船舶重工集团公司第七二三研究所,江苏 扬州 225101)
0 引 言
电子侦察主要是为了获取重要的军事情报,利用侦察设备在复杂的电磁环境中提取敌方雷达信号的方位和频率信息,明确敌方雷达的功能与用途[1-4]。电子干扰技术是根据电子侦察获得的敌方雷达的工作参数,对敌方工作雷达进行反制干扰,因此电子侦察是电子对抗技术中的重要环节。
对于传统的电子侦察系统而言,通常方案是由几种组件装配而成,各个组件需要独立调试,主要缺点有: (1)工作频段较窄;(2)通道一致性差;(3)集成度较低;(4)体积较大;(5)成本较高;(6)调试量较大。因此,对于高集成度小型化电子侦察干扰系统的需求日益增多。
本文介绍了一种小型化X波段电子侦察系统,该系统包括接收发射部分、前端部分、方位测量部分、频率测量部分、发射源部分和自检源部分。另外在系统中采用集成化芯片,集成化芯片集成了限幅器、低噪声放大器、数控衰减器以及开关等射频芯片,极大程度地满足了系统的高集成度要求。本电子侦察系统体积小,集成度高,性能优越,可靠性高,具有广阔的应用前景。
1 小型化电子侦察系统介绍
如图1所示,小型化X波段电子侦察系统包括接收发射部分、前端部分、方位测量部分、频率测量部分、发射源部分和自检源部分。
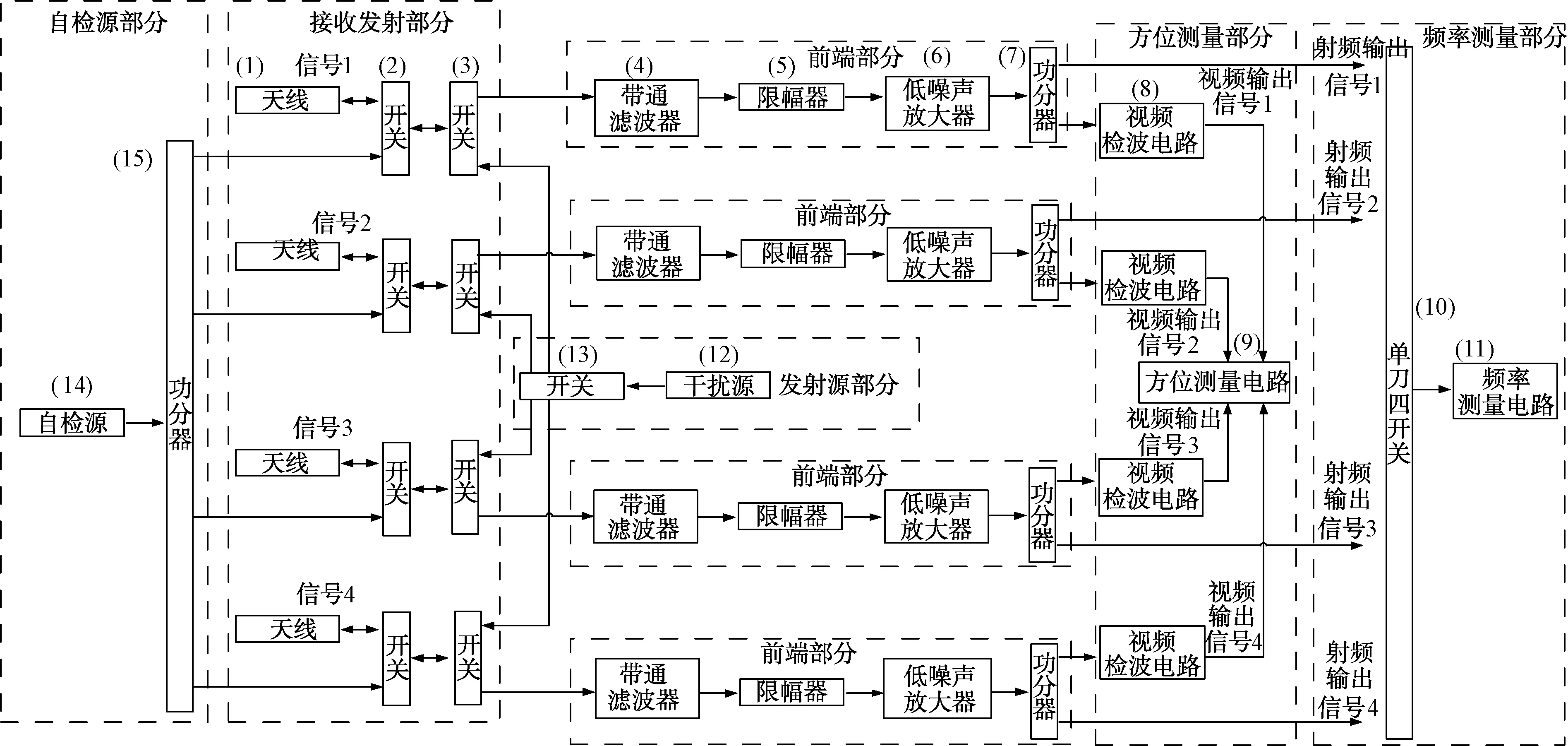
图1 小型化X波段电子侦察系统原理图
接收发射部分包括依次连接的天线、自检切换开关、接收发射切换开关;所述前端部分包括依次连接的带通滤波器、限幅器、低噪声放大器、功分器;所述方位测量部分包括依次连接的视频检波电路、方位测量电路;所述方位测量部分包括依次连接的单刀四开关、频率测量电路;所述发射源部分包括依次连接的干扰源、干扰源切换开关;所述自检源部分包括依次连接的自检源、功分器。
小型化电子侦察系统的主要技术指标要求如表1所示。
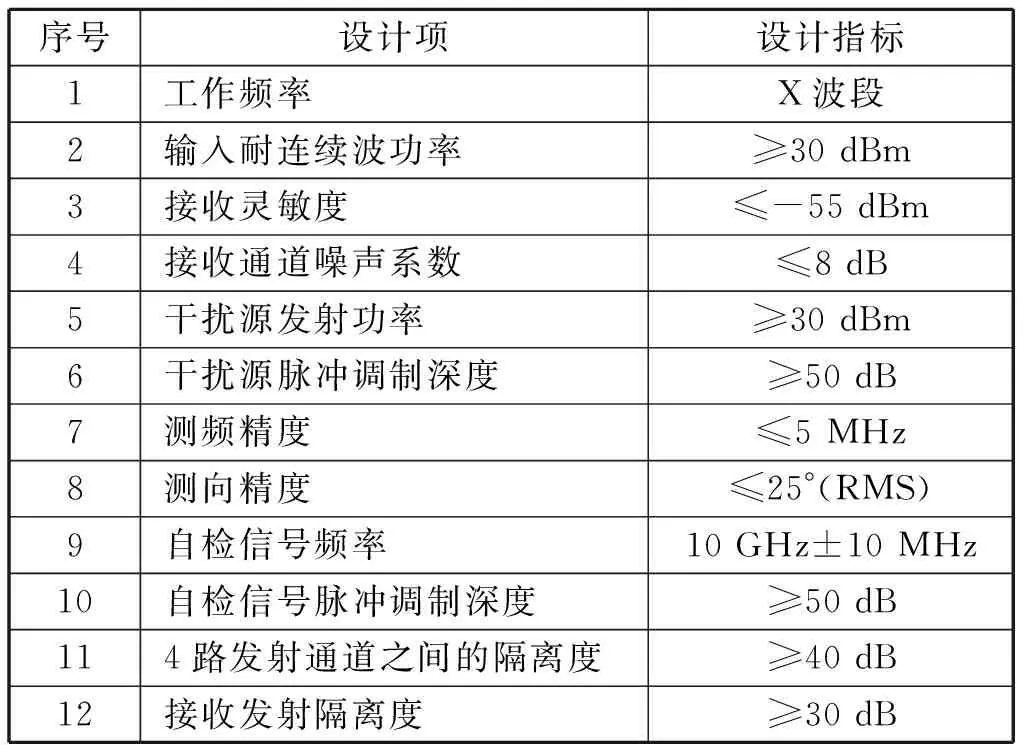
表1 小型化X波段电子侦察系统的主要技术指标
1.1 接收发射部分和前端部分介绍
4个天线将外部X波段范围内的信号接收至接收发射部分,如图2所示。4路信号分别经过自检切换开关和接收发射切换开关后进入前端部分,其中自检切换开关和接收发射切换开关集成在一起,电路可以在接收、发射、自检3种状态中动态切换。
由于电路集成度较高,微带线在布局时产生冲突,此时需要采用射频对穿技术,然而射频对穿容易导致电路的失配。如图3所示,通过HFSS建模仿真,最初的射频对穿结构驻波≥2.5,插损≥1 dB;通过结构优化仿真,射频对穿结构驻波≤1.5,插损≤0.3 dB,满足电路使用。
接着4路信号分别经过带通滤波器、限幅器和低噪声放大器后进入功分器,其中将2 W限幅器和低噪声放大器集成在一起,有效改善了电路噪声系数,提高了电路集成度。信号被功分器分为8路信号,其中4路信号进入方位测量部分,经过视频检波电路后进入方位测量电路,最终提取出信号的方位信息;其中另外的4路信号进入频率测量部分,经过单刀四开关后进入频率测量电路,最终提取出信号的频率信息。由于系统对于各路的幅度一致要求很高,采用数控衰减器和单刀四开关集成芯片方案,有效改善了幅度一致性指标。
1.2 方位测量部分介绍
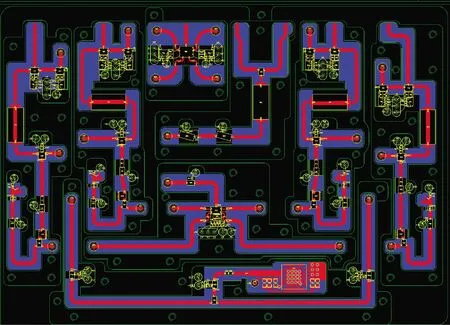
图2 接收发射部分电路图
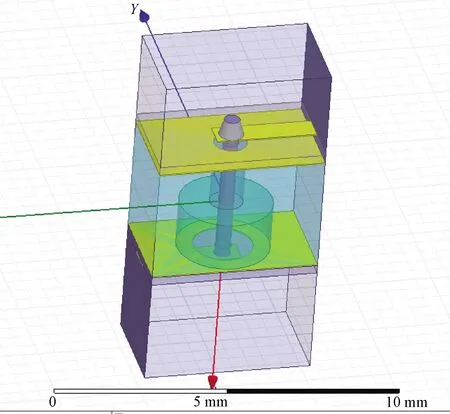
图3 射频对穿HFSS仿真
本系统采用四元天线比幅测向法,就是采用4个独立的宽带螺旋天线来产生4个独立的毗邻波束来覆盖360°方位,这些天线采用相同的方向图函数F(θ),且均匀分布[5-6]。图4所示是一个四元天线全向振幅单脉冲测向的原理框图。图中,相邻天线的张角θs=360°/4,各个天线的方位指向分别为:
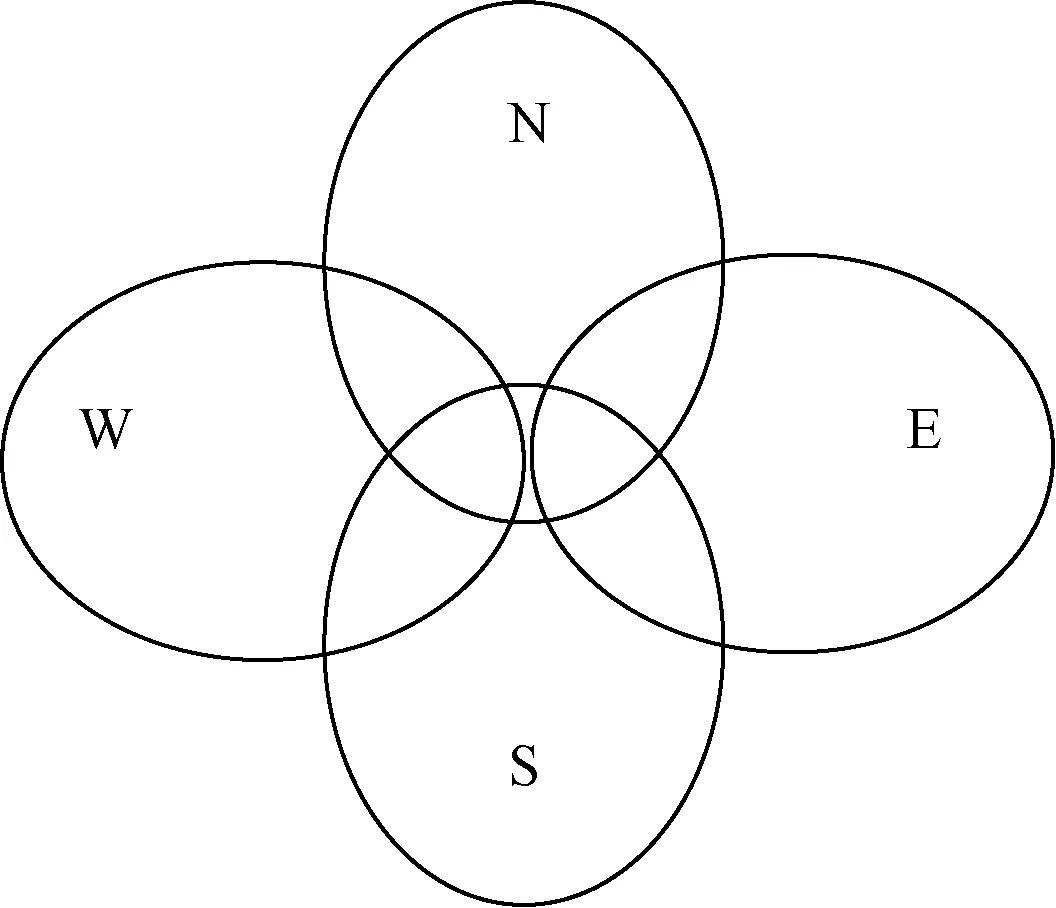
图4 四元天线方向图
Fi(θ)=F(θ-iθs),i=0,1,…,3
(1)
每个天线接收的信号经过各自振幅响应为Ki的接收通道,输出脉冲的对数包络信号Si为:
Si=lg[KiF(θ-iθs)A(t)],i=0,1,…,3
(2)
式中:A(t) 为雷达信号的振幅调制。
对同一雷达信号来说,总有1对相邻波束分别输出最强和次强的信号,通过比较这对相邻波束输出信号包络幅度的相对大小,就可以确定外界信号入射角φ。
根据文献可知,测向系统内部噪声会引起随机误差[7],在四天线系统中,内部噪声引起的测向误差Δφ为:
(3)
本系统中,要求随机测向误差在20°以内。由于四元天线阵的天线方向图以45°呈现对称性和周期性,因此根据0°~45°的误差分布规律,就可以分析出全部范围内的误差情况。在入射角φ从0到45°变化的过程中,对于信噪比的要求越来越高:根据公式(3)可得出,如φ=0时,需要信噪比SNR>11 dB;φ=45°时,需要信噪比SNR>15 dB。
系统的灵敏度由带宽和噪声系数决定,灵敏度Smin由下式表示:
Smin=-114 dBm+10 lgB+FN+SNR
(4)
式中:-114 dBm为噪声基底;B为信号带宽(以MHz为单位);FN为噪声系数(以dB为单位);SNR为信噪比(以dB为单位)。
由软件计算可得,链路噪声系数FN约为5.5 dB。X波段的信号带宽为4 000 MHz,系统Smin为-55 dBm时,根据公式(4)计算得出SNR约为17.5 dB,满足测向误差要求。
1.3 频率测量部分
本系统采用鉴频法瞬时测频,其测频功能的核心是延迟线鉴相器组合电路以及编码电路[8]。其原理结构图如图5所示:信号经过功分器分为2路,一路经过延迟线,一路直通。由于传输路径不同,经过传输以后信号相位会发生变化,2路之间会形成相位差,假设信号的频率为f,若延时差为τ,则相位差为Δφ=2πfτ。接着通过平方率检波器检测将该相位信息转换成幅值信息,最后通过后端的信号处理获得信号的频率。这样就实现了雷达信号相位差到频率的转变。采用鉴频法的瞬时频率测量方式测量精度较高,响应速度快,对应的体积较小,可很好地满足集成化要求。
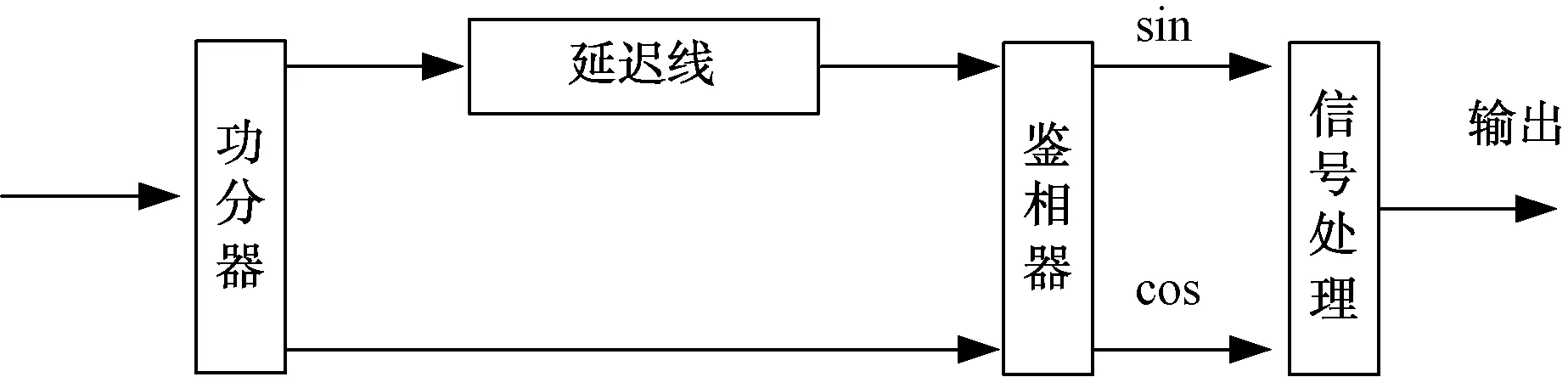
图5 干涉比相法瞬时测频原理图
1.4 发射源部分和自检源部分
系统在获取外部信号的方位以及频率信息后,发射源部分的干扰源产生特征相同的干扰信号,分别经过干扰源切换开关、接收发射切换开关、自检切换开关后,由天线将干扰信号向外部发射。
自检源部分由自检源产生自检信号,分别经过功分器后分为4路信号,然后分别进入后面的主通路,以此检查主通路工作是否正常。
1.5 实物及测试结果
通过电路系统集成,实现了一种X波段小型化电子侦察系统的设计。如图6所示,该电子侦察系统集成度高,体积小,重量轻。
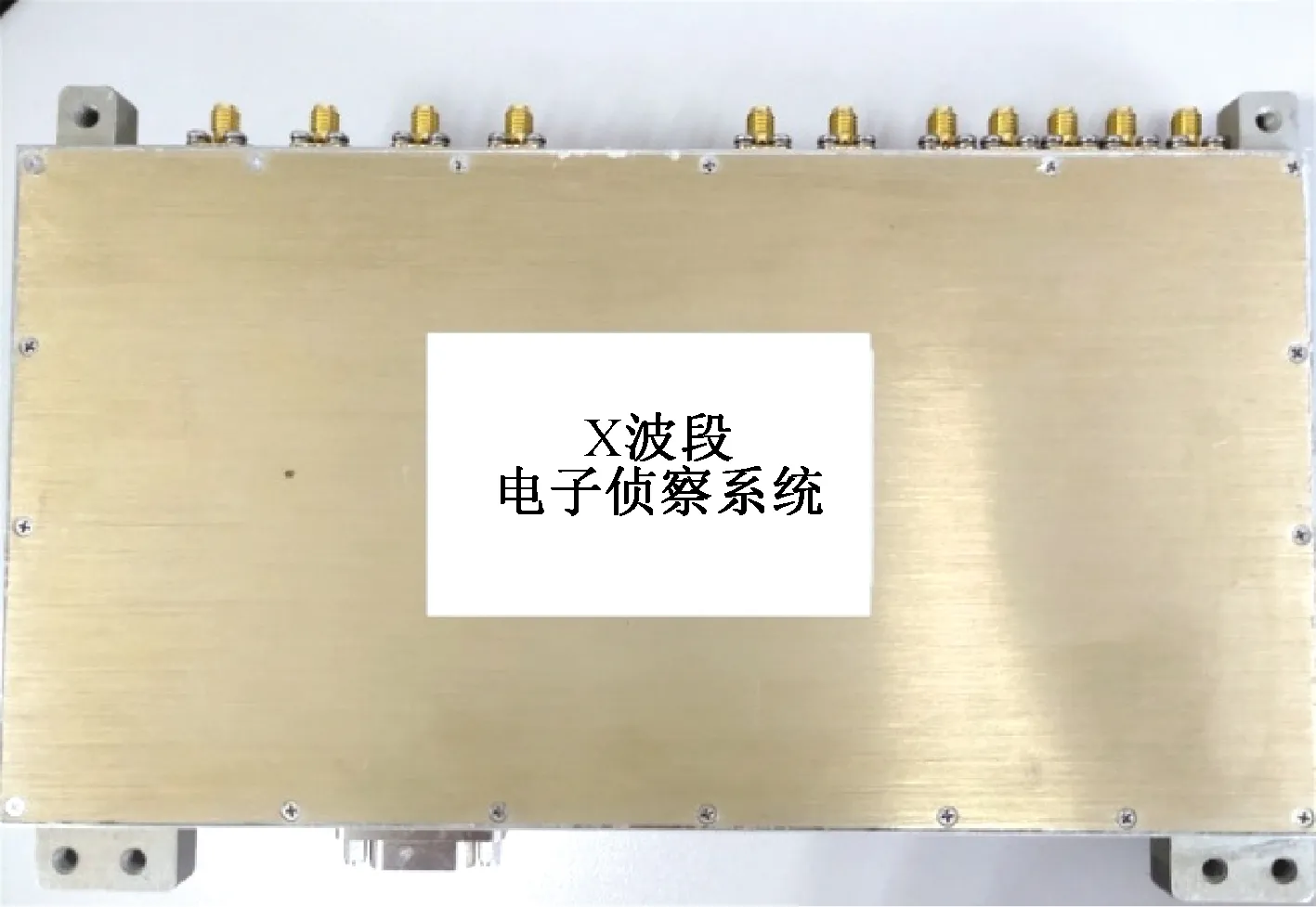
图6 小型化X波段电子侦察系统实物图
电子侦察系统的实物测试结果如表2所示,测试结果表明该电子侦察系统达到了设计指标的要求。
2 结束语
本文介绍了一种小型化电子侦察系统。在射频电路上,该系统的射频电路内部采用了集成化芯片以及射频对穿来提高集成度;在该系统内部集成了接收发射部分、前端部分、方位测量部分、频率测量部分、发射源部分和自检源部分等电路功能,实现了系统小型化,并且改善了系统的一致性指标。小型化电子侦察系统的实用性和可靠性都比较强,因此有理由相信未来在电子侦察领域中会得到广泛应用。
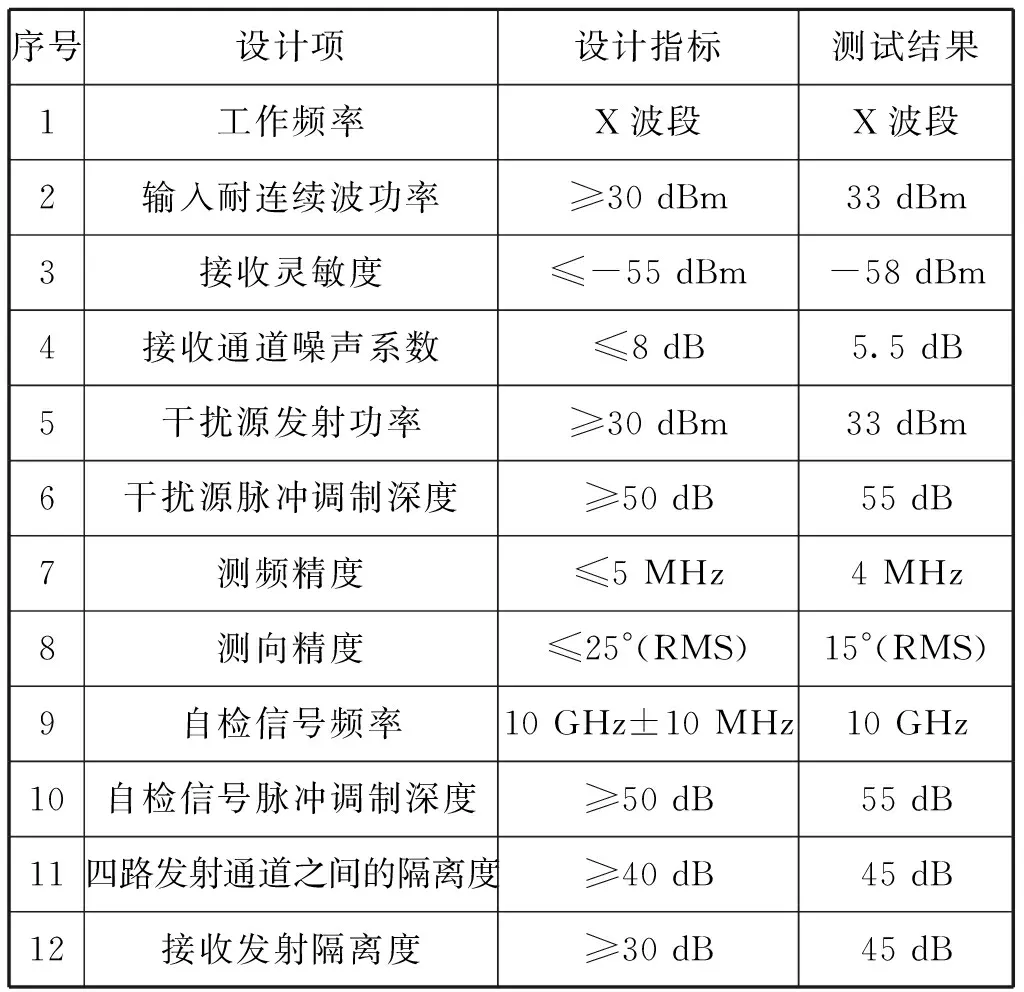
表2 最终测试数据
猜你喜欢
幼儿园(2021年12期)2021-11-06 05:10:20
中国交通信息化(2017年10期)2017-06-06 07:13:20
电子制作(2016年1期)2016-11-07 08:42:54
学习月刊(2016年19期)2016-07-11 01:59:46
中国修辞(2016年0期)2016-03-20 05:54:32
幼儿100(2016年28期)2016-02-28 21:26:17
火控雷达技术(2016年2期)2016-02-06 02:29:00
中国卫生(2014年7期)2014-11-10 02:33:02
现代防御技术(2014年6期)2014-02-28 18:26:38
汽车与新动力(2012年5期)2012-03-25 10:09:40