极端地形绳系机器人研究进展
2020-04-24 09:24王小涛张家友
科学技术与工程 2020年5期
王小涛, 张家友
(南京航空航天大学航天学院,南京 210016)
近年来在火星和月球表面发现了很多有研究价值的区域[1],而这些区域多处于被称作极端地形的区域之中。极端地形被定义为至少有如下特性之一的地形:陡峭斜坡、松软土壤、高耸的悬崖、缺乏直射光照、极度寒冷、沟壑等[2-3]。而大多数机器人只能应用在相对平坦的岩石地形上,并不适用于探索极端地形区域。陡峭斜坡和松软的土壤会削弱漫游器的牵引力,极大地降低了地形的可通过性;传统的摇臂-转向架结构,在陡峭斜坡上的滑动会显著增加,并且在某些区域根本无法进入[4];高耸的悬崖对漫游器也非常危险,在崎岖不平的地形上,漫游器很可能意外跌落;由于绝大多数的机器人都使用太阳能,所以进入缺乏直射的阳光的区域也就意味着只有有限的能源可以使用。
为了克服上述极端地形区域所带来的限制,目前针对陡峭斜坡、高耸悬崖及沟壑等地形设计的漫游器多为绳系机器人,系绳的存在使得穿越极端地形区域成为可能,但同时也带来了发生系绳缠绕的问题[5]。目前中国尚未有针对极端地形绳系机器人的研究,所以将主要依据国外研究现状分别根据机构构型和系绳管理技术对极端地形绳系机器人的发展进行分析和总结。
1 绳系机器人研究现状
1.1 腿式
Dante Ⅱ(图1)是由CMU在1992年开发的,是一个可以攀爬陡峭斜坡的绳系步行机器人[6],致力于活火山的探索,Dante Ⅱ共有8条腿,每个腿都可以独立地调整垂直位置来避障及适应崎岖地形。通过使用系绳,Dante Ⅱ可以在陡峭斜坡上进行上升和下降[7],在陡峭斜坡上上升和下降过程中,系绳通过提供与重力相反的作用力并不断地调整系绳张力来维持自身的稳定,同时最小化腿的载荷。通过减小足上的牵引力及提供稳定性,使得Dante Ⅱ可以在接近垂直的地形上行走。系绳除了提供支持力外,还用来传输能源及视频遥测数据。Dante Ⅱ可以通过多种方法进行控制,从直接远程操作到实时自主行走的监控控制。Dante Ⅱ所需要的能源设备、视频遥测设备以及火山口全景摄像头都位于靠近火山边缘固定机器人的锚点周围,锚点处的卫星波段通信天线在机器人和远程控制站之间发送视频和数据,远程控制站的操作员使用图形用户界面来监控和指挥机器人,操作人员还可以获得各种视频图像及用激光扫描仪绘制的地形图。
虽然绳索的支持使得Dante Ⅱ能够探索极端地形区域,但是也带来诸多限制,最明显的缺点就是需要找到一个可靠的支撑点(机器人质量比较大),且探索范围受限于绳索的长度;如果将数据传输改为无线传输并使用板载能源,那么绳索的直径将会大大减小,因此绳索的长度就会相应增加;绳索在机器人下降过程中提高了其稳定性,但当机器人偏离绳索方向时,绳索将产生一个侧向力,这将使其发生侧翻,该问题导致Dante Ⅱ在成功完成了下降到火山之中的任务之后,在上升过程中由于发生了侧翻而提前结束了任务,最后使用直升机和两名辅助人员恢复了正常状态。

图1 Dante ⅡFig.1 Dante Ⅱ
1.2 轮式
Cliffbot(图2)为应用于陡峭斜坡上的四轮绳系机器人,该系统由3个Cliffbot机器人组成,其中2个在悬崖边充当支撑点来辅助第3个机器人,第3个机器人通过控制系绳在陡峭斜坡上行走[8]。由于使用了两根系绳,Cliffbot可以在斜坡上进行横向运动,但是这种优势会随着下降深度的增加而消失。这种方法在相对平滑的平面上工作还不错,但是在比较崎岖的地形上,会使系统非常复杂且约束了机动性,使得运动规划变得更加复杂[9]。目前针对复杂环境下的路径规划问题,国内外已经有了相当多的研究,Hert等[10-13]、Xavier[14]主要研究的是针对多个绳系机器人情况下的路径规划问题;而尹新城等[15-20]主要致力于避障环境下的路径规划问题。

图2 CliffbotFig.2 Cliffbot

图3 TRESSAFig.3 TRESSA
在某种程度上,Cliffbot和Dante Ⅱ面临着相同的问题,不过Cliffbot在模块化、多机器人控制及自我配置能力上有更长远的考虑。由于Cliffbot使用在悬崖边缘的机器人来进行系绳的收放操作,减轻了在悬崖上的机器人的质量,但却增加了系绳与路面的摩擦,增加了绳索被破坏的概率,更严重的是Cliffbot不能从侧翻中恢复。在此基础上,进一步研发出了TRESSA(图3)组合机器人[21],可运行的斜坡角度由70°提升到85°,改进版的Cliffbot集成了机械臂及用于科学探索的仪器设备,增加了双目视觉、地形建模、地形分析、局部路径规划及侧滑估计等特性。
Axel是一个可以通过系绳在陡峭斜坡上升降的双轮绳系机器人,并且可用于火山口、平坦、陡峭的岩石斜坡地形中,可在斜坡上进行土壤采样任务[22-23]。Axel的首要目标是最小化系统复杂度及质量[24],具有对称车身的两轮车和一个脚轮臂,共3个电机,分别控制轮子、脚轮臂、系绳。其中脚轮臂有几个目的:收放系绳、在平坦的地形上提供反作用力矩抵抗车轮推力、调整巡视器的俯仰角来改变双目相机和其他设备的朝向、如果其中一个车轮执行器发生故障,其作为冗余备份使用。Axel使用差分驱动,省去了双驱结构,降低了复杂度、质量及能源消耗。汲取Dante Ⅱ的经验,系绳放置在本体上,减少了系绳与地形的摩擦,提高系统的可靠性。Axel有两种主要的运动方式:①滚动模式。使用轮子的电机进行驱动,此时系绳处于松弛状态,脚轮臂置于地上,与轮子的电机形成反作用力,轮子电机旋转,朝前运动。②翻滚模式。只有脚轮臂电机提供驱动力,该模式用于收放中心体中的系绳,只能直线前进或后退。在斜坡上行驶时,会混用两种模型,根据地形阻力和系绳张力来控制模式切换;在垂直地形上由于没有阻力,只能使用翻滚模式,类似的VolcanoBot[25](图4)是一款以Axel为原型的改进版,专用于探索火山裂隙。
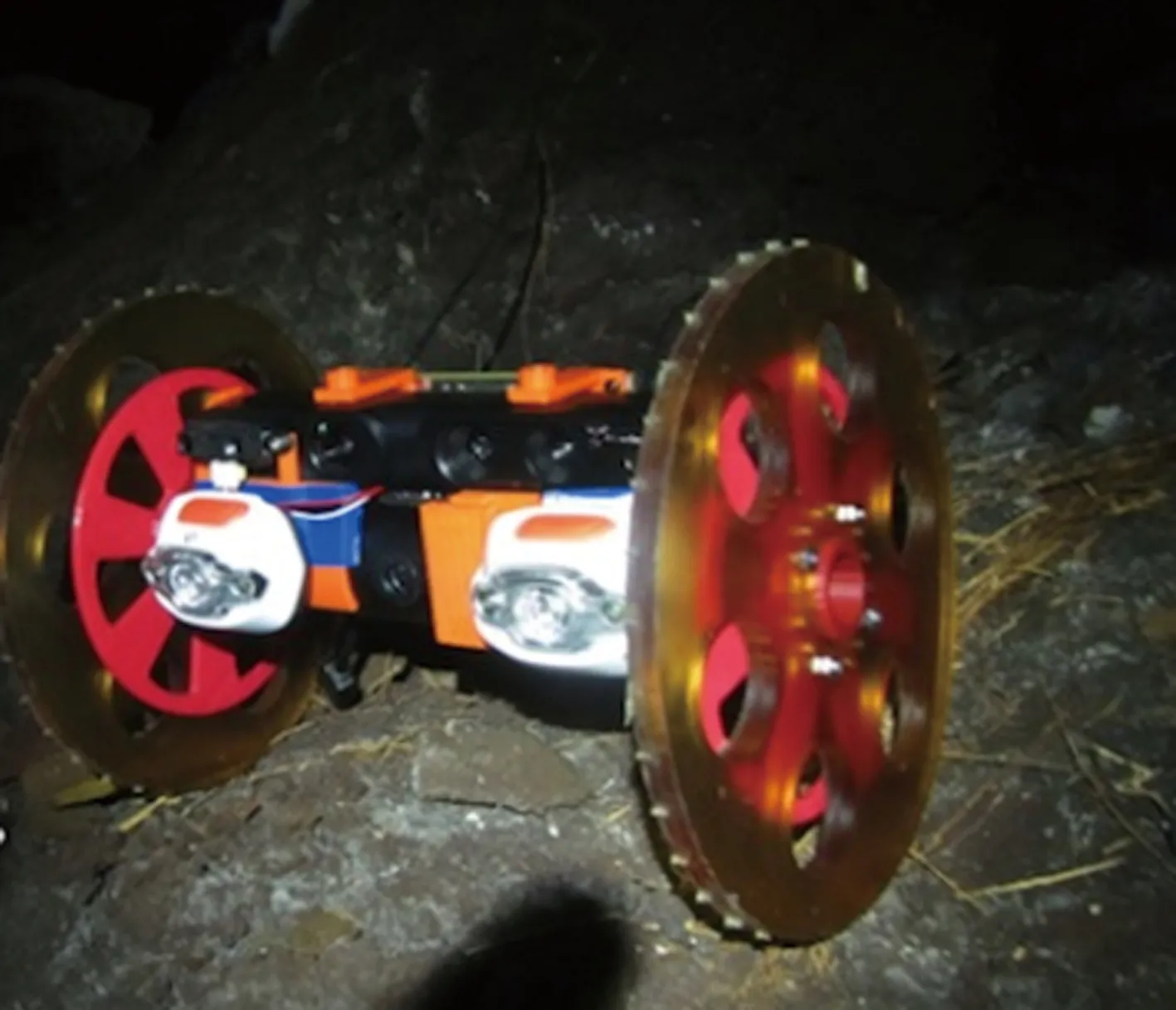
图4 VolcanoBot ⅡFig.4 VolcanoBot Ⅱ
DuAxel(图5)是由两个Axel和一个中央模块组成的四轮机器人,不受绳长的限制,可以从安全着陆点处长距离行驶到感兴趣的极端地形区域[26]。到达极端地形之后,其中一个Axel机器人与中央模块分离,中央模块在极端地形区域边缘充当锚点,中央模块与分离的Axel通过系绳相连接,分离的Axel沿斜坡下降到极端地形区域。

图5 DuAxelFig.5 DuAxel
系绳除了提供力支持外,还负责能源传输及数据交换。新版本的Axel Ⅱ(图6)质量39 kg,可带10 kg负载,由于上一个版本的Axel中心体的旋转和系绳缠绕是耦合的,在旋转仪器朝向时会导致自身的上升和下降,新版本的Axle增加了两个电机解除了这个耦合,把调整仪器朝向和系绳缠绕变成了相互独立的操作,在调整仪器朝向时不会再导致自身的上升和下降。同样的,Axel系绳收放的操作由自身完成,此时系绳与地面的相对运动非常小,减少了系绳的磨损,因此可以使用比之前更细的系绳,相应的探索范围也会增加。
与DuAxel类似的还有双子月球车Moonraker和Tetris[27](图7)。
vScout(图8)是一款可用于悬崖等地形的四轮绳系机器人,长远目标是开发出可以用于行星探索的机器人[28-31]。到目前为止,虽然已经有理论方法实现自动化,但是尚未应用到斜坡地形上,与其他应用于陡峭地形的系统不同的是,vScout通过NRP(network reusable paths)与VR&T(visual teach & repeat)技术[32]实现自动化运行,不过在此之前,需要操作员首先对机器人进行示教操作,之后才可自动化运行,而且目前只能够在平坦地形上运行,还没有应用到陡峭地形上。在vScout的基础上,进一步研制了TReX四轮绳系机器人[33],与vScout不同,TReX的系绳收放由自身携带的系绳收放装置完成。

图6 Axel ⅡFig.6 Axel Ⅱ

图7 Tetris和MoonrakeFig.7 Tetris and Moonraker

图8 vScoutFig.8 vScout
1.3 履带式
因为履带式机器人在爬坡、越障和跨壕沟等方面具有优越性,常被应用于军事、消防以及核工业等领域。典型的履带式机器人可分为固定履带式机器人和摆臂履带式机器人。摆臂履带式机器人根据摆臂的数量可分为四履带双摆臂机器人和六履带四摆臂机器人[34-37]。Quince(图9)是一款具有4个独立子履带的高机动性履带式救援机器人,Quince的4个高自由度子履带增加了攀爬能力[38-39]。其携带的绳索仅用作通信使用,没有其他用处,虽然考虑到了绳索发生缠绕的可能,但并没有采取规避措施,最终在第6次任务中由于系绳缠绕在了楼梯处导致绳索缠绕设备无法正常工作,最终第6次任务完成后没有成功回收机器人。

图9 QuinceFig.9 Quince
1.4 复合式
轮式移动机器人虽然具有运动稳定性与路面的路况有很大关系,但是其运行速度更快,而腿式机器人虽能够适应复杂的地形[40-45],ATHLETE(图10)是由喷气推进实验室(jet propulsion laboratory,JPL)与美国国家航空航天局(national aeronautics and space administration,NASA)、斯坦福、波音合作开发的用于月球崎岖地形的具有高机动性能的轮腿式机器人[46],速度高达10 km/h,比火星探测车(mars exploration rovers,MER)快了100倍。ATHLETE被用来辅助人类在行星上的运输任务,为了适应更加崎岖的地形,在超过20°的斜坡上运行时,ATHLETE可以配备系绳装置,这样就可以在陡峭的地形中行走。优点1:在平坦地形上使用轮式行走,在崎岖地形锁住轮子,改用腿式行走,该方式很好地结合了腿式机器人的机动性和轮式高效性;优点2:高度模块化,可重用性强,四肢可配备快速拆卸工具适配器,以便将工具或通用机械手固定在四肢。缺点是ATHLETE带有大量的执行器,腿式机器人平台的内在复杂度会使系统有高风险的失败率(尽管增加了一定的冗余度)。Dante Ⅱ与ATHLETE主要系统参数对比如表1 所示。根据表1可以看出,Dante Ⅱ和ATHLETE的质量都非常的大,相对火星探索任务来说它们更适合用于月球探索。

图10 ATHLETEFig.10 ATHLETE

表1 系统参数对比Table 1 Comparison of system parameters
2 绳系机器人关键技术
当机器人使用了系绳时,系绳管理就非常重要,然而对该领域的研究并不多。系绳管理的定义为:通过管理系绳减少其内在问题并获得有关环境的有用信息的过程[47]。系绳管理首先要解决的问题就是系绳缠绕问题。机器人若想回到出发点,必须能够解决系绳缠绕问题,第一种解决方案是避免系绳缠绕的发生,通过对机器人进行精确的运动规划可以解决该问题,然而此方法需要环境地图、机器人的位置信息及可能发生缠绕的障碍物位置信息,该方法对先验信息的要求严重限制了其实用性;另一种方案就是定位发生缠绕的位置,然后沿着同一路线返回。Kumar等[47]在2008年首次提出了系绳缠绕检测方法,该方法不需要机器人位置信息及先验环境地图,只需要系绳方位角及系绳张力就可检测出系绳缠绕的发生,并在此基础上于2014年提出并实现了一种称作“系绳跟随”[48]的方法来解除缠绕,然而此方法仅是通过系绳方位角及张力的不一致性进行“暴力定位”,并没有使用概率方法对缠绕位置进行定位[49],该方法本质上也是在避免缠绕。
Murtra等[50]使用非线性优化的方式融合系绳长度、IMU及轮式里程计数据对管道检测机器人进行定位。该方法仅是使用系绳长度作为一种新的约束提高了定位精度,并没有对系绳缠绕位置进行检测及建图。Mcgarey等[51]在2016年首次提出了基于系绳的定位与建图问题,并提出一种基于FastSLAM[52]的粒子滤波器[53-55]来估计系绳缠绕位置(intermediate anchor point,IAP),并在2017年给出了基于系绳的同时定位与地图构建(simultaneous localization and mapping,SLAM)[56]数学模型,建立了TSLAM问题的完整描述[57],同时提出了一种新的TSLAM问题解决方法:Batch Formulation[57],该方法与现代SLAM中的光束平差法(bundle adjustment,BA)[58]方法类似,都是将最大化后验概率问题转化为最小化目标函数的非线性优化问题,同时针对TSLAM问题使用RANSAC[59]Segmentation方法得到IAP初值,根据系绳每部分的固定长度进行数据关联,根据TSLAM问题的稀疏性可以使用Cholesky[60]分解或Schur[61]分解降低计算复杂度。典型极端地形绳系机器人系绳功能对比如表2所示。

表2 系绳功能对比Table 2 Functional comparison of tether
注:√表示具有某个功能;×表示不具有某个功能。
从表2可以看出,早期的绳系机器人并没有提供系绳管理功能,绳系仅作为基本组件,而基于TReX的绳系机器人开始加入系绳管理功能,并对绳系机器人问题进行了完整的建模。
3 结论
构型选择决定机器人行走控制方式及其精度,目前为止,极端地形绳系机器人构型大致分为腿式、轮式、履带式及复合式,综合系绳管理技术从以上分析可得到以下主要结论。
(1)系绳的辅助使得机器人可以在极端地形上运行,但带来的一个副作用就是会导致横向运动不灵活,Dante Ⅱ的侧翻揭示了运动在陡峭地形上的两个重大挑战:①需要能够进行态势感知的能力;②从危险状态中恢复的能力。
(2)目前运行在极端地形上的机器人还需要操作员远程操作,并不能实现完全的自动化,下一步应该根据板载传感器,比如通过相机进行环境感知,实现完全的自动化操作。
(3)板载能源对行星探索机器人来说是一个很大的挑战,不仅昂贵,而且增加了系统质量,增加了额外的结构和执行器,由于能量有限,这限制了任务的可持续性,同时无线通信在没有“视线”时变得非常困难甚至无法通信,而且还涉及到天线指向等问题,系绳的存在很好地解决了该问题;但当系绳仅提供支持力时,系绳可以更细,相应的巡视范围也将变大。
(4)早期解决系绳缠绕问题是在避免系绳缠绕,现在演变成了TSLAM问题,不但解决了系绳缠绕问题,还提高了机器人定位精度,然而目前TSLAM解决方案仅适用于2D场景,有待扩展到3D场景中。
猜你喜欢
散文诗世界(2022年1期)2022-01-13
空间碎片研究(2021年3期)2022-01-05
北京航空航天大学学报(2021年7期)2021-08-13
空间科学学报(2021年6期)2021-03-09
孩子(2019年7期)2019-07-29
当代陕西(2019年10期)2019-06-03
当代陕西(2019年6期)2019-04-17
天津诗人(2017年2期)2017-11-29
载人航天(2017年4期)2017-08-17
有色金属设计(2014年4期)2014-03-11