
考虑无功支撑的双馈风机高电压穿越控制策略
2020-04-23 01:23兰传盛潘庭龙
电子技术与软件工程 2020年5期
兰传盛 潘庭龙
(江南大学物联网工程学院 江苏省无锡市 214122)
鉴于清洁环保、建设周期短、运行成本低等优点,近几十年来风力发电获得迅猛增长[1]。电网故障下风力发电机组的故障穿越能力是当前研究的重点,与低压穿越(LVRT)能力相比,对风电机组在电网电压骤升条件下的运行控制策略研究尚不深入。在实际风电场系统中,电网电压骤升是一种常见的电网故障,同样会导致风机脱网,因此,当前急需分析电压骤升情况下风力机组的运行工况,并提出相应的改进控制策略,完成高电压穿越(НVRT)目标[2]。
电网电压骤升成因一般为低压故障恢复后无功过补偿、负载突降和单相接地故障等。为保证电网运行的安全与稳定性,避免风电机组因电压保护作用而从电网中解列,需要风电场具备高电压穿越能力[3],当前各个国家和公司陆续出台了高电压穿越标准,其中以澳大利亚所规定的并网标准为例[4],高电压下风电机组并网运行要求在电网电压升至1.3pu 情况时风电机组能够保持长期不脱网运行,并要求高电压情况下风机需要吸收一定量的无功功率,无功电流与电网电压的变化率之比为2:1,这涉及到了高电压穿越过程中无功补偿的问题。
目前针对双馈风力发电机(DFIG)并网过程中,电压骤升故障下的电压穿越研究逐渐深入。主要从以下两个方面完成НVRT 任务:第一类为增加硬件电路,第二类方法为不加硬件电路的改进系统控制策略方式。文献[5]分析了在电压骤降恢复对连锁脱网中高电压穿越过程的影响。文献[6-8]深入分析并研究了外加辅助电路控制策略的工作过程,发现该方法在故障发生后会恶化DFIG 定子电流与转子电流的冲击,有功与无功波动、电磁转矩波动都会增加,不利于DFIG 在故障下的安全稳定运行。文献[9]分析了双馈风力发电机在НVRT 的整个暂态过程,并从定子励磁电流出发实现故障穿越。文献[10]采用串联网侧变换器的方式实现高电压穿越,但外接辅助器件,增加了系统的成本。文献[11]采用DFIG 有源阻尼控制策略解决对称电压骤升故障问题。文献[12-13]针对高压骤升故障下DFIG转子电压、转子电流的波动时间和波动幅度问题进行研究,在RSC系统中变化阻尼和添加虚拟阻抗,设计了一种改进转子侧控制策略的方案,提升了DFIG 系统的高电压穿越能力,但未考虑转子容量限制。文献[14]考虑故障后电网电压恢复问题,设计了机组提供无功支持的НVRT 控制方案,但未探究直流侧电压波动问题的影响。文献[15]提出转子电流抑制和电网电压抑制方法,与直流斩波器配合使用,解决撬棍装置频繁切换问题。文献[16]基于无源阻尼与改进控制策略相结合的НVRT 方式,降低转子电流的同时实现转子电压的抑制,实现电压穿越,但未考虑无功需求。

图1:双馈风机转子侧等效电路

图2:双馈风机转子侧不同等效阻抗下转子电压
上述文献所提控制方案虽然在一定程度上有助于双馈风力发电系统实现高电压穿越,但未深入分析НVRT 下无功需求,也未考虑定子侧与网侧控制无功支持问题,可见目前双馈电机的高电压故障穿越运行控制仍旧存在诸多问题需要解决。本文针对以上问题,从不加外部硬件电路方案出发,分析了电网电压骤升故障下双馈风力发电机的暂态过程;提出了转子侧模拟电感方法以改善转子侧过电流,并充分考虑模拟电感的限制条件,提出并修正了等效阻抗的范围,以提升该方法的准确性;最后考虑高电压穿越对于无功的需求,设计了转子侧变换器(RSC)与网侧变换器(GSC)协同控制方法,添加无功反馈控制部分,在抑制转子电压的同时,最大化的提供无功电流支持,提升双馈风力发电机的高电压穿越性能。仿真表明,该综合控制策略能实现双馈风力发电机高电压穿越目的,也能为电网提供较好的无功支持。
1 电网电压骤升故障下DFIG特性
建立双馈风力发电机数学模型,不考虑磁饱和,电机的定、转子侧采用电动机惯例,归算至定子侧,有两相静止坐标系下DFIG数学模型[17]:
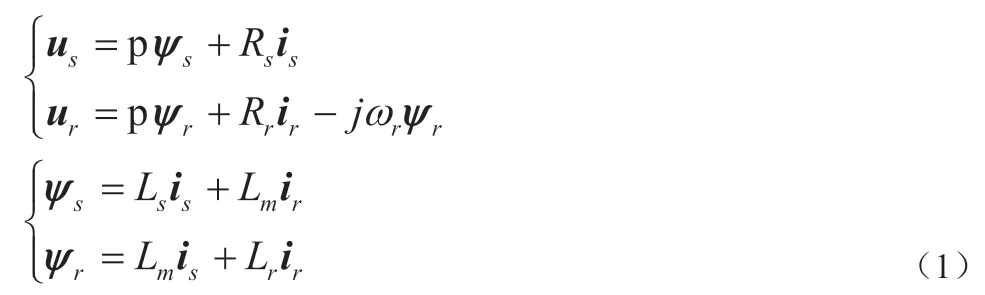
式中,u、i 和ψ 分别表示电压矢量、电流矢量和磁链矢量,p 表示微分算子,下标s、r 分别表示定子和转子分量,R 和L 分别表示电阻和电感,ωr表示转子角速度,lm表示定转子间互感。
在转子坐标系下,消去转子电流,再带入转子电压表达式,有转子电压:


式中,Us为电网电压幅值,h 表示骤升比率,ω1表示同步旋转角速度。根据当前国际并网准则,在h 大于0.3 之后,机组可脱网运行[18],因此本文考虑的骤升比率h 范围为0 至0.3。忽略定子电阻的影响,根据公式(1)有定子磁链暂态表达式[19]:

2 转子侧模拟电感高电压穿越方法及阻抗修正
由式(2)可知转子电压由两部分组成,分别为定子磁链感应电动势er和转子电阻和暂态电感上的压降uRL,有:

为抑制转子过电流及电磁转矩的振荡,将RSC 的等效阻抗表示为:

将式(5)、(6)带入公式(2),有:

由图2 可知,依据数学关系,若α=90 度,即等效阻抗Leq是纯电感,则uRL将与er方向相反,此时所需的转子电压ur最小。同时,若等效阻抗Leq是相同转子电压下等效纯电感,感应电动势er不变,骤升故障后转子电流ir也可抑制到最小。因此有结论,本文将RSC的等效阻抗模拟为电感,所需的转子电压和故障后的转子电流都将降低。
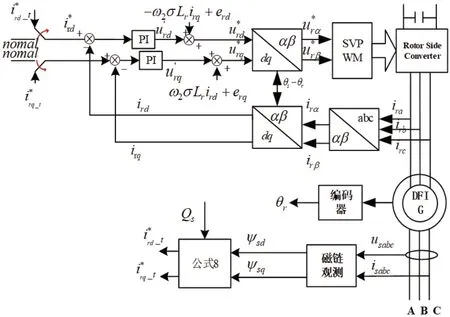
图3:转子侧高电压穿越控制策略框图
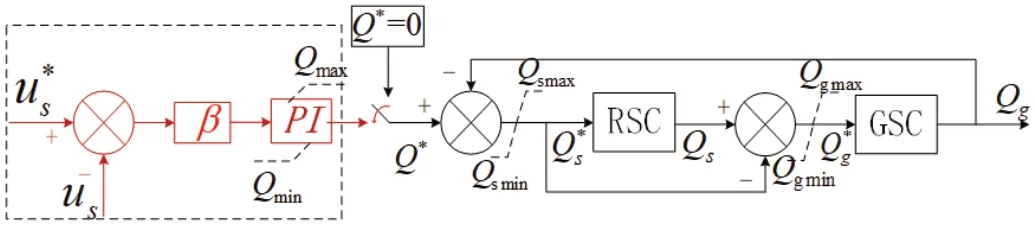
图4:协同无功控制策略
因此,可将转子侧等效总阻抗Ztotal表示为等效电感Leq与瞬态电感之和,据式(5)和(7)可得转子电流的参考值为:

下面求解转子侧等效总阻抗Ztotal取值范围,若考虑RSC 端转子电流的限制,转子过电流的瞬态最大值不超过变流器的安全阈值,有:

其中Irm1、λ 为转子电流的安全阈值与裕度系数,Irmax为ir的最大值。综合(8)和(9)有转子侧等效总阻抗Ztotal的最小值为:

考虑直流侧电压限制因素,依据文献[15]中最小直流侧电压Udcmin应满足GSC 和RSC 电压振幅要求。在线性空间矢量调制(SVM)范围内,最小直流链路电压Udcmin与GSC 和RSC 端电压的关系描述为[15]:

因此转子电压幅值Ur需小于最小直流链路电压Udcmin,有:

其中,Udcmin和ε 为最小直流链路电压与裕度系数。且由公式(6)和(7)有定子磁链感应电动势er与转子电压ur的关系式:

根据式(12)和式(13)有转子侧等效总阻抗Ztotal最大值为:

其中,|Ermax|表示故障期间转子电压允许的最大值,|Udcmin|表示直流侧所允许的电压最小值。
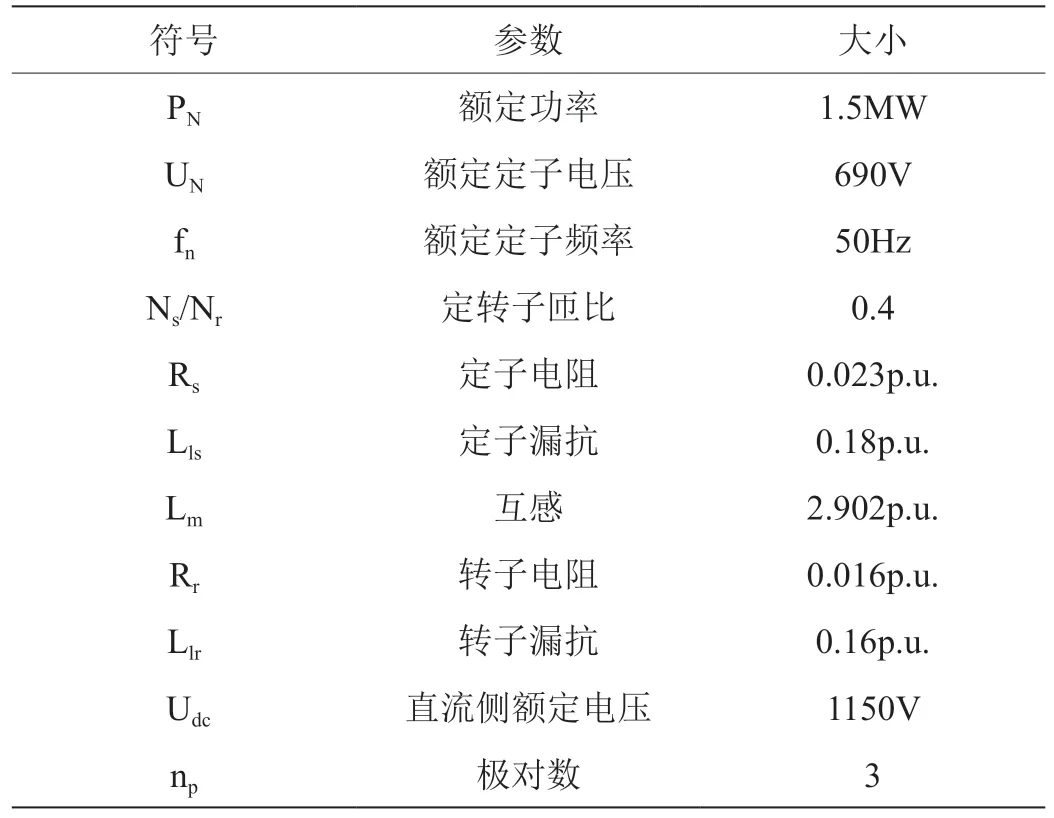
表1:双馈风电机组参数表
因此控制策略中转子侧等效总阻抗Ztotal的值,需在式(10)与式(14)之间,转子侧等效总阻抗Ztotal越大,则电流抑制效果越好,但转子电压会有所增加,转子侧等效总阻抗Ztotal越小,转子电压抑制效果越好,但转子故障电流会越大,整个控制策略框图如图3 所示。当电网发生骤升故障,电压骤升至110%以上,故障检测模块[20]检测到故障后立即切换为本文转子侧模拟电感的控制方法。
3 网侧与转子侧协同无功控制方式
为满足高电压穿越中对于无功功率的要求,电网电压高于1.1倍标称值时,电网电压每骤升1%,机组需至少提供2%的额定感性无功电流[14]。正常工作下,为了减少两个变换器的损耗,转子侧变换器(RSC)与网侧变换器(GSC)的参考无功功率设定为0。据此设计了如图4 所示的分级协调控制方案,添加一个无功反馈控制,可实现定子与GSC 间的协调无功控制。将GSC 输出的部分无功当做RSC 无功控制的输入,可实现电网电压骤升至1.1 倍后的无功补偿。
在发生电网电压骤升后,故障检测模块[20]工作,转换为协同无功控制策略,吸收的参考无功Q*由额定并网电压u*s 与故障电压us的差值确定,其设定u*s 为额定电压1.1 倍的标称值。图中指数 β用于调整产生的无功功率,以满足并网规范要求。通常RSC 的容量要比GSC 大,因此要靠RSC 控制为故障穿越提供较多的无功支持[20]。
主要工作原理如下:在电压骤升至1.1 倍限定值之后,首先设定网侧无功参考信号igq为0,控制定子侧提供主要的无功支持,有公式:

其中,isq表示定子侧需提供的无功电流,igq表示故障后GSC提供的无功电流,IN表示DFIG 的额定电流。根据定转子间的互感,有q 轴转子电流为[18]:

其中,irq表示转子侧需设定的无功电流。
定子侧吸收的无功功率受到了转子变换器电流的限制:

其中,Irmax转子侧变流器的电流最大值。
在电压骤升故障不严重时,由RSC 控制定子侧可提供全部的无功支持;在严重故障时,如并网点电压骤升至额定电压的1.2 倍以上,受到模拟电感策略中转子电流和转子变换器电流限制的影响,定子侧无法提供足够的无功补偿[14]。
此时可控制网侧变换器补偿剩余所需的无功功率,即加入一个反馈控制:

其中,Qs*表示初始给定的额定定子无功功率,Qs表示此时定子侧所能吸收的最大无功功率,表示此时网侧变换器吸收的无功功率。只有在Qg*大于零时,即定子侧无法吸收全部的无功功率,才会修正网侧无功参考信号,根据修正网侧无功参考信号,有:

如图4 所示,本文添加无功反馈控制部分,实现协同无功控制,在RSC 控制定子端输出大部分无功电流之后,若仍需无功支持,则需要控制GSC 端提供剩余无功。
Qs*与必须相应地低于定子和电网侧的最大允许无功功率,据分配好相应无功后,RSC 与GSC 端控制定子与网侧变换器提供相应无功电流。
采用提出的网侧与转子侧协同控制无功补偿方式,主要是控制q 轴方向的电流参考值,其中采用模拟电感方式确定转子电流值,根据下式确定d 轴方向转子电流值:

而网侧变换器q 轴方向的电流参考值由式(19)确定,d 轴电流主要目的是维持直流母线电压稳定。
4 仿真分析
为分析本文设计的高电压控制策略的有效性和可行性,在Matlab/Simulink 环境下搭建了1.5MW 的双馈风电机组仿真模型,双馈风电机组的主要参数如表1 所示。双馈发电机组工作在额定电压条件下,其中输出有功功率Ps为0.7p.u.,输出无功功率Qs为0p.u.,机组转差率为-0.2。在t=1s 时,发生130%的对称电压骤升故障,采用上述故障检测方法,若检测到电网故障,启用НVRT 控制策略,持续300ms,故障清除。此外,仿真还选取了文献[20]传统控制策略下双馈风力发电系统在电网发生对称高电压故障下的工作情况,与本文综合控制策略进行如下比较。
图5 为130%对称故障下定子电压波形,假定转子电压与转子电流的裕度系数分别为0.95,根据公式(10)及(14)得出等效电感值Leq范围为0.162p.u.~0.328p.u.,本次仿真实验取Leq=0.3p.u.,比较以下两种方案,第一种为文献[20]传统控制策略,第二种为本文加入协同无功方式的НVRT 控制策略。
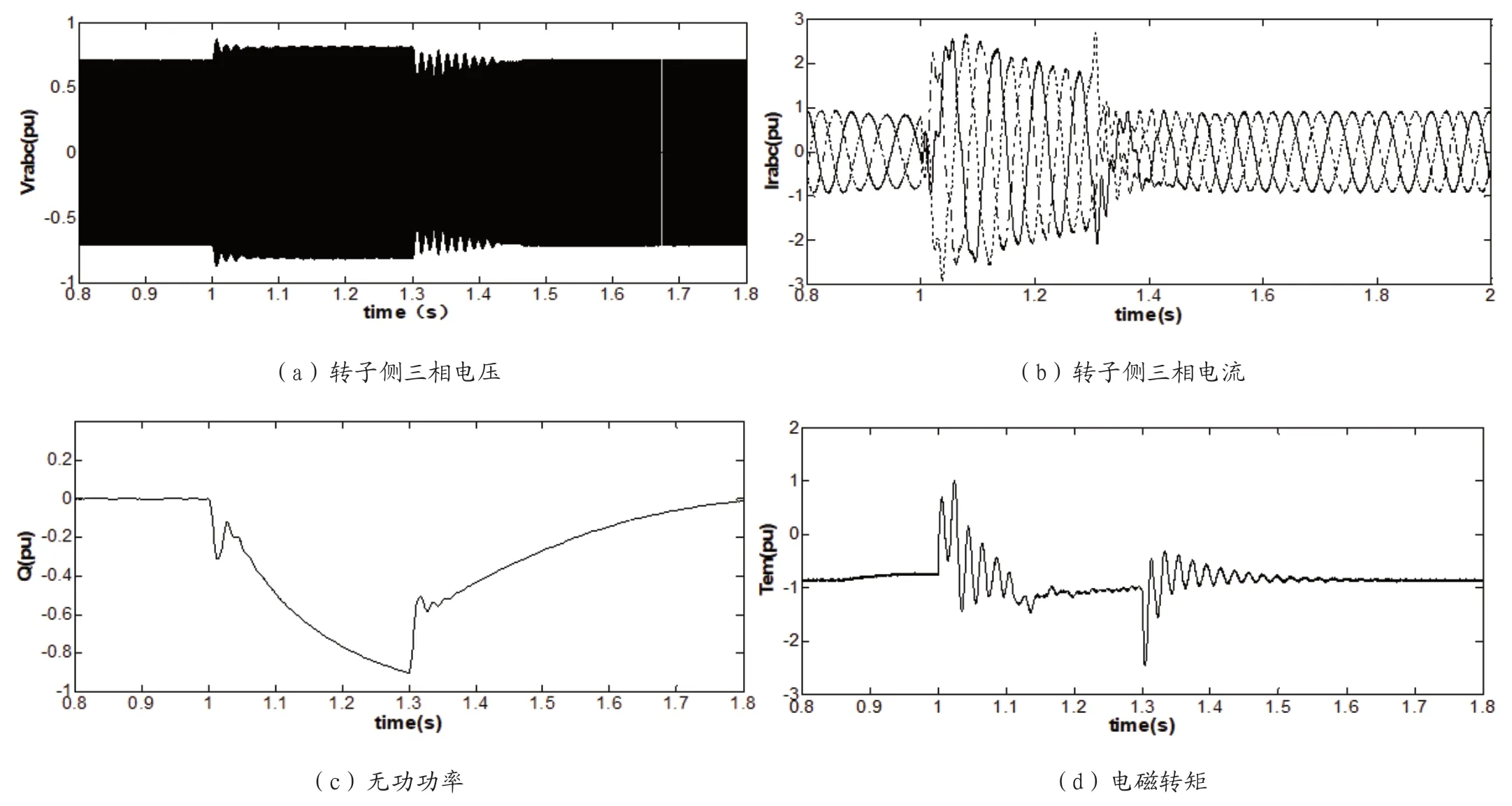
图5:传统控制策略仿真结果

图6:模拟电感的协同无功控制策略仿真结果
由图5 可以看出,在1.0s 电网侧电压出现130%幅度的突变,传统控制策略下,风机转子电压上升,转子电流峰值最高突增到2.5p.u.左右。如图6 所示,采用本文控制策略后,由于模拟电感的存在,转子电压会增加,而故障后转子电流能抑制在1.5p.u.内,转子电流得到抑制,满足高电压穿越的需求,其中故障下转子电压增加的原因是转子电流很低,导致转子瞬态阻抗上的电压降也很低,在这种情况下转子电压必须抵消大部分电动势,因此故障后的转子电流相对较低,但转子电压较大。
若参考国外并网准则中对于无功的需求,在电压骤升至110%之后,电网电压每骤升1%,机组需提供2%的额定感性无功电流,因此130%对称电压骤升故障后需有0.6p.u.无功功率以满足并网准则。如图5(c)、图6(c)所示,将传统控制策略与本文改进的控制策略进行无功比较,可知本文加入协同无功的控制策略相比于传统控制方案,能在130%的对称电压骤升故障下为电网提供0.611p.u.左右的无功功率支持,与参考值相差不大,在加入协同无功控制方式后,支持电网电压恢复,提升了高电压穿越性能,满足了并网需求。
5 结论
本文从技术原理和仿真验证两个方面,提出了一种基于模拟电感和协同无功支持的НVRT 综合控制方案,详细介绍了网侧、转子侧无功协同的控制策略,从转子电压、转子电流、无功功率等方面对该方案进行了评价,通过仿真验证了所提НVRT 综合控制策略的优越性。
(1)与传统控制方案相比,本文提出的综合控制方案不仅考虑到转子侧电流的突变情况,也兼顾无功支持需求,所设计的方案将转子电流抑制在允许水平内,对于其他高电压控制策略的设计有指导意义。
(2)采用模拟电感控制方法,实现了故障下转子电流抑制,且充分考虑模拟电感的限制条件,修正了等效阻抗的范围,对后续相关НVRT 控制策略设计具有指导作用;与协同无功控制方式配合,产生足够的感性电流,满足了电网规范要求,实现无功功率支持目的,证明了该方案在提高НVRT 能力方面的有效性和优越性。
(3)本文设计的综合控制方案,由于模拟电感的存在,会出现转子电压恶化的情况。该方案无需补充其他硬件保护设备,可弥补原有的НVRT 控制策略的不足,实现双馈风电机组的电压穿越需求。
猜你喜欢
大电机技术(2022年3期)2022-08-06
防爆电机(2021年6期)2022-01-17
防爆电机(2021年1期)2021-03-29
测控技术(2018年2期)2018-12-09
通信电源技术(2018年5期)2018-08-23
电测与仪表(2015年16期)2015-04-12
电测与仪表(2015年16期)2015-04-12
电机与控制应用(2015年10期)2015-03-01
大电机技术(2015年5期)2015-02-27
电测与仪表(2014年13期)2014-04-04
