基于流固耦合法的巡逻船首部结构耐撞性能研究
2020-04-22 12:20:18罗凯王凡超何秦
舰船科学技术 2020年3期
罗凯,王凡超,何秦
(中国船舶及海洋工程设计研究院,上海 200011)
0 引 言
船舶碰撞具有结构复杂、持续时间短、冲击载荷大、损伤区域严重等特点。Tabri[1]对耦合和非耦合数值方法进行了比较,以研究船舶运动与船舶耐撞性之间的耦合影响。Pedersen和Zhang[2]的分析方法被用于非耦合模拟的碰撞能量,而耦合模拟提出了相应的数值定义。首先介绍非耦合和耦合方法,之后使用4200TEU集装箱船进行“垂直”碰撞的案例研究,以描述用于预测撞击结构的变形和破裂的2种方法之间的差异。张志强等[3]针对典型的船体双层壳结构,研究失效准则对碰撞仿真分析结果的影响。本文主要利用有限元软件建立碰撞模型,利用非线性瞬态动力学分析软件MSC-Dytran求解分析,基于流固耦合法研究巡逻船首部结构耐撞性能。将撞击船与被撞船置于水介质中,可以更加准确地模拟船舶碰撞的真实场景,为更加准确地预报不同碰撞角度、不同碰撞速度下的被撞船结构响应奠定基础。
1 600吨级巡逻船基本情况介绍
600吨级巡逻船主要参数包括:总长约70 m,满载排水量640 t,首部区域外板骨材间距300 mm。该船基本结构图如图1所示。
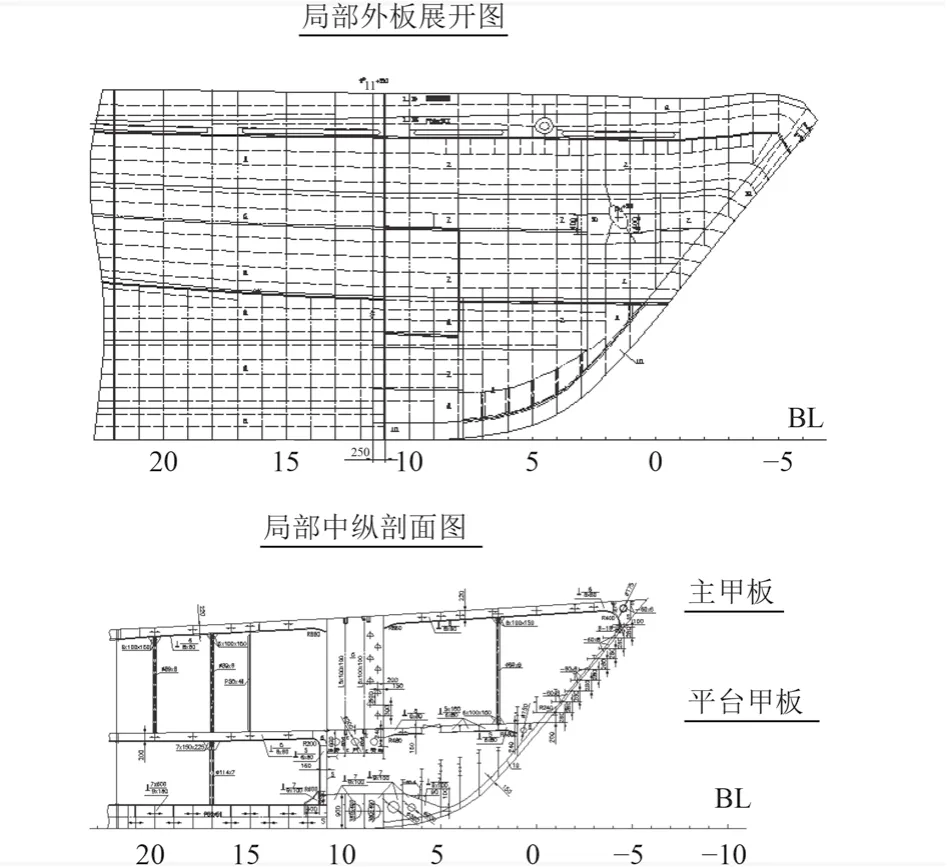
图 1 600吨级巡逻船局部结构图Fig. 1The Local structural diagram of 600 ton class patrol vessel
2 有限元模型设置
被撞船模型范围:被撞船取全船有限元模型,其中目标撞击区域船首向后延伸至横舱壁且不小于0.33倍船长的纵向范围、内外舷板之间的横向范围、型深的垂向范围内的所有结构构件的真实模拟[4]。撞击船模型范围:撞击船取全船有限元模型,其中首防撞舱壁向船首的纵向范围、船宽的横向范围、型深的垂向范围内的所有结构构件的真实模拟[5]。材料采用线性强化弹塑性模型,考虑材料应变率敏感性,有关数据如下:材料密度7.85×103kg/m3;弹性模量2.10×1011N/m2;屈服应力3.45×108N/m2;泊松比0.3;最大塑性失效应变0.19[6];Cowper—Symonds本构方程中2个常数为D=40.4,q=5。撞击区域的网格尺寸和单元失效应变按照100 mm来选取[7],其他区域的网格尺寸可适当加大。碰撞过程中使用了主—从接触(Master-slave contact)和自身接触(Self-contact)[8]。在计算中考虑撞击船与被撞船之间的摩擦作用,动摩擦系数和静摩擦系数均定义为0.3。边界条件考虑撞击船和被撞船均处于全自由状态。撞击船,由于其在垂直对中碰撞运动中主要是纵移(Surge),船体周围水的影响相对很小,所以直接采用附连水质量来加以处理。被撞船考虑周围水域影响,流场沿被撞船的宽度方向取2倍船宽,船长方向取1.5 倍船长,高度方向取2倍吃水[9]。
考虑流固耦合时,通过改变碰撞速度和碰撞角度确定撞击船与被撞船之间的碰撞工况。
工况1:巡逻船3 m/s速度以20°斜向撞击被撞船的首部区域;
工况2:巡逻船5 m/s速度以20°斜向撞击被撞船的首部区域(见图2(a));
工况3:巡逻船3 m/s速度以60°斜向撞击被撞船的首部区域;
工况4:巡逻船5 m/s速度以60°斜向撞击被撞船的首部区域(见图2(b));
工况5:巡逻船3 m/s速度以90°正向撞击被撞船的首部区域;
工况6:巡逻船5 m/s速度以90°正向撞击被撞船的首部区域(见图2(c))。

图 2 基于流固耦合法不同撞击角度下的的有限元模型Fig. 2Finite element model under different impact angles based on fluid-structure coupling method
3 基于流固耦合法下的船舶碰撞性能
3.1 被撞船的应力与损伤变形
图3反映基于流固耦合法通过改变碰撞角度和碰撞速度得到碰撞后被撞船首部区域的损伤变形图。可以看出:1)直接发生碰撞的局部区域在撞击瞬间超出许用应力,但瞬态应力不作为船舶破损的依据;2)结构的损伤变形基本上集中在撞击区域,碰撞损伤具有局部性。在撞击船的直接撞击下,被撞船的船体外板、甲板、横舱壁、舷侧纵骨和舷侧肋骨等都发生了一定程度的变形,3)当600吨级船以20°斜向撞击时,不管是3 m/s还是5 m/s,被撞船的舷侧外板和内部结构均未出现破损情况;当600吨级船以60°和90°撞击时,以3 m/s撞击被撞船时,其舷侧外板和内部结构均未出现破损情况,而以5 m/s撞击被撞船时,其舷侧外板和内部结构均出现破损情况。从图3还可以看出:舷侧外板发生破损后内部构件的碰撞能力较差,而撞深继续增加时与其相邻的强肋骨发生破损变形。当被撞船受到5 m/s垂直撞击时,被撞船的损伤范围最大为0.34 m2,破损出现在舷侧外板、强肋骨、舷侧纵骨等主要结构上,其他构件发生变形而未破损(见表1)。就损伤模式而言,采用流固耦合法不仅可以对船舶碰撞的整个过程进行真实有效的仿真,而且能够获得被撞船的碰撞力、能量转换和吸收的时序结果,并对各具体构件的损伤变形过程进行跟踪分析。仿真计算的成功实现证明了该方法的可行性,但这也是一个最复杂的方法,建模工作量大,计算CPU时间长。

图 3 被撞船首部应力分布与损伤变形云图Fig. 3Stress distribution and damage deformation cloud of the head of the collided ship

表 1 被撞船变形或破损情况Tab. 1Deformation or damage circumstance of collided ship
3.2 被撞船的运动响应
图4 显示的是被撞船舶的运动情况,可以看出:1)撞击角度越大,被撞船的速度变化曲线越大;2)碰撞过程中,大角度撞击时被撞船一般以横移为主,小角度撞击时3个方向的速度变化很小。从图中还可以看出,计算终止时撞击船的速度减小,这意味着撞击船将有动能损失;而被撞船的速度有所增加,这表明碰撞开始后相当一段时间内被撞船的运动响应才有所体现,即被撞船也吸收了部分动能。这种情况给出了一个很有意义的信息,即船舶碰撞过程中撞击船的动能损失将主要转化为被撞船舷侧结构的塑性变形能。当撞击船的撞击角度较小时,两船速度变化不大,能量吸收也较小,速度在横向和纵向的变化也不明显。当撞击船的撞击角度60°和90°时,两船速度变化较为明显,被撞船在撞击部位的能量吸收也较大,速度在横向变化明显。

图 4 被撞船速度运动曲线Fig. 4Velocity motion curve of collided ship
3.3 碰撞力
图5表示基于流固耦合法通过改变碰撞角度和碰撞速度两船发生碰撞时的碰撞力时间历程曲线。可以看出,碰撞力具有很强的非线性特征,在碰撞过程中的不同阶段船体结构出现了不同程度的卸载,其每一次卸载都代表了某种构件的失效和破坏。通过曲线对比可以看出最大碰撞力跟碰撞速度和碰撞角度有直接关系,小角度下的碰撞力比大角度下的碰撞力要小,同时速度越大碰撞力也随之变大。以工况6为例,从碰撞力曲线上可以看到碰撞力在0.38 s之前逐渐增加,0.38 s到达最高点后随之减小,当其在0.60 s时急剧下降,达到一个较低点后开始处于一个相对稳定的过程。随着碰撞的一直进行,撞深不断增加,撞击船和被撞船损伤面积也在增大,参与碰撞的构件增多;碰撞结束后,撞击船与被撞船粘在一起,因为惯性和周围水域的作用,两船之间会存在着振荡和擦碰,因此在理论上的碰撞结束时刻碰撞力并没有迅速衰减为零。

图 5 不同工况下的碰撞力变化曲线Fig. 5The curve of changing collision force under different working conditions
4 碰撞下的极限速度
在敌我双方不可避免地发生碰撞以便达到驱赶敌船的目的时,操船过程中必须采取一定措施。不管是撞击船还是被撞船,自身损伤变形尽量要小,结构几乎没有出现破坏失效,危害既小又可以起到与对方对抗及显示我方态度的目的。因此很有必要研究在不同撞击角度下的碰撞极限速度。本节系统计算撞击角度在 20°,45°,60°,90°和 135°下的 600 吨级巡逻船的极限撞击速度。每种计算工况均以外板出现破裂为极限速度的评判依据,计算结果见表2。

表 2 不同撞击角度下的极限速度值Tab. 2The limiting velocity at different impact angles
图6表示600吨级巡逻船在不同撞击角度下的极限撞击速度曲线。可以看出:1)90°撞击下极限撞击速度最小(3.5 m/s),为最危险情况。20°撞击下极限撞击速度最大(10 m/s),为最安全情况。在需要发生船体接触时,尽量以小速度、小角度碰擦为主要形式。2)将曲线分为上下2个区域,可以得出曲线下方对于被撞船来说是安全的,而对于曲线上方撞击船的航速对被撞船是不利的,被撞船的外板结构会产生破裂失效。被撞船的结构损伤变形主要集中在撞击区域,由于巡逻船首部均较为瘦削,碰撞损伤具有局部性,撞击过程易发生“劈柴效应”,因此,在易发生碰撞部位或重要设备放置区域应进行局部结构加强。

图 6 极限耐撞速度曲线Fig. 6Limiting crashworthiness velocity curve
5 结 语
本文建立船舶与水介质全耦合有限元模型,利用船—水—船相互作用的流固耦合算法,对巡逻船首部区域结构的碰撞特性进行研究。主要结论如下:
1)基于“全耦合”分析技术,建立撞击船与被撞船整船模型,成功解决了船体与流场、撞击船与被撞船的耦合,更加真实地反映碰撞场景和碰撞载荷,使计算结果更加准确。
2)将外部动力学与内部动力学联合考虑,不但获得船体结构响应,同时也获得了被撞船舶的运动模式,被撞船在撞击过程中以横摇为主,伴随有首摇与垂荡。被碰船舶的运动幅度越大,能量越多地转换为被撞船舶的动能,碰撞双方的结构损伤就越小。
3)减小撞击角度可以提高被撞船舶承受的极限撞击速度。在不可避免的与敌船发生碰撞时,尽量采取首部、小角度碰撞,并将相对速度尽量控制在极限耐撞速度曲线以下,不仅起到驱赶敌船的目的,同时也可以保证撞击船自身结构与船上人员的安全。
猜你喜欢
数学物理学报(2022年2期)2022-04-26 14:08:28
作文小学高年级(2022年3期)2022-04-20 08:17:04
机械与电子(2020年10期)2020-10-22 05:06:54
福建中学数学(2018年1期)2018-11-29 02:52:14
中国军转民(2017年9期)2017-12-19 12:11:12
37°女人(2017年8期)2017-08-12 11:20:48
滇池(2017年7期)2017-07-18 19:32:42
舰船科学技术(2016年1期)2016-02-27 15:39:13
大型铸锻件(2015年5期)2015-12-16 11:43:20
湖南理工学院学报(自然科学版)(2014年1期)2014-02-28 22:12:27