
基于Arduino的“智绘”写绘一体机器人
2020-04-14 04:55卜苗苗张利强江国强贺斯慧
企业科技与发展 2020年2期
关键词:模块化
卜苗苗 张利强 江国强 贺斯慧

【摘 要】机器人技术是当今高科技研究的重要方向,世界各国高度关注。随着现代社会的不断发展,机器人成为工作场所自动化生产线和灵活制造系统不可或缺的一部分。智能机器人系统对于协助人类书写、绘图、雕刻,以及提高书写速度和质量具有重要意义。机器人书写技术是一种以机器人为载体,结合计算机视觉和机器学习的技术,使机器人能够在教育、培训或学习后自主书写。
【关键词】智能写画;激光雕琢;控制学;模块化
【中图分类号】TP242 【文献标识码】A 【文章编号】1674-0688(2020)02-0047-03
0 引言
本项目主要研究绘图机器人利用激光在钢材、釉面、石材等表面的字符标记问题,较深入地研究了多自由度串连机器人机器构造、正逆运动学、运动空间、速率雅克比矩阵、动力学及轨迹计划问题。并对在空间平面、柱面及球面的多角度操作问题做了详细的实验报告。结构设计采用“模块化+移动+可变比例”的设计理念,有固定点和移动两种工作模式。
1 绪论
1.1 研究背景及意义
跟着知识经济时代的到来,高技术及使之产业化已成为众人关注的主题。机器人技术是高科技的一个关键领域,指引着人类进步,已成为制造业不可或缺的工具和技术手段,并已成为国家制造业和技术水平的重要指标。
智绘绘图机器人综合了计算机、控制论、仿生学等多学科而形成的应用于表面绘制的技术产品,其应用场景广泛,除了传统的纸质书写、绘画,还有釉面绘画、钢材喷绘、石材雕刻、玻璃喷绘、墙体喷绘等。而智绘机器人系统利用重构模块的机器人,对于辅助人类书写、画图、雕刻、提高书写速度与质量具有重要意义,也是对多种人工智能技术的创新性与集成性应用。
1.2 国内外现状
(2)国内关于写字机器人的研究。王光健、陈雪华、张学文对四自由度书写机器人进行了详细研究,并详细分析了运动学仿真、轨迹规划、控制系统设计和文本轮廓提取;王晓丽、宫晓博对机器人分别做了写字、绘画这方面的实验;此外,南京林业大学机器人研究所对机器人复杂轨迹的编程进行了研究,并进行了汉字书写实验[3]。
(2)国外关于写字机器人的研究。MF Crainic等人提出了一种促进证书或传统信用证创建的方法。系统使用机器人手臂RV2AJ和笔在斜坡上书写。K Tahara和S Arimoto提出了一种迭代学习控制方案,该方案获得了关节角度轨迹和坐标系的解释,并实现了从机器人初始点到指定随机光滑表面上目标点的运动[4]。
当前,写字机器人存在如下3个方面的问题:{1}写字机器人不够智能,并没有通过机器学习算法去学习写字,而只是通过程序控制的自动化的写字过程,只能书写出程序中已有的字符。系统鲁棒性较差,一旦程序出错,就会影响整个写字过程。系统缺乏异常容忍能力,且系统自身并不能找到错误原因。{2}当前的写字机器人只是在同一水平面简单的程序化的进行书写,不能实施多角度的操作,只局限一个方向。{3}当前的写字机器人只局限于在纸质品上绘画,写字操作不够精细,且需要人工辅助。
1.3 本课题的研究内容
本项目围绕以下几个方面的内容进行研究。{1}机器控制:结合机械结构、前进和后退运动学、工作空间、速度雅可比,力学和轨迹规划控制绘图机器人。{2}对在空间平面、柱面及球面的多角度绘制。{3}模块化设计,针对不同材料、笔触模块的相应设计。{4}中文字體,为了能够有效地绘制中文字体,需要对中文字体进行建模学习。仿生人写字绘画的动作,使得绘制的作品更具人性。
2 智绘机器人的硬件部分
2.1 构造绘图机器人的材料
(1)供电模式。一个USB接口无法提供足够的电流,所以采用三头插头,电压为225 V,满足系统电流需求。
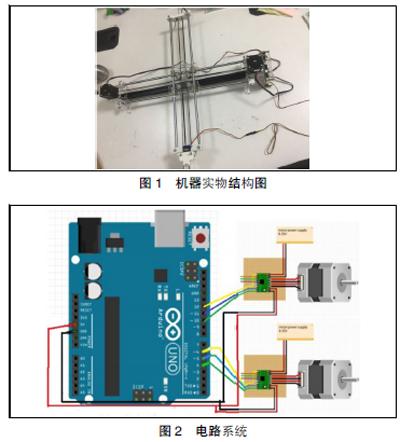
(2)基座及硬件的构成。机器的结构非常简单。横向抛光杆安装在左底座和右底座之间,移动中心可移动地安装在横向抛光杆上。通过在水平梁中移动X轴或通过驱动滑架模块和纵梁、滑架模块、运动中心和纵梁围绕Y轴移动,其结构如图1所示。
(3)配置电路。由L293D集成电路、28引脚DIP集成电路插座、2个22 pF和1 100 nF电容、10 K电阻和原型PCB板组成电路系统(如图2所示)。
3 智绘机器人的控制
3.1 Arduino控制器
Arduino Uno R3是一款功能强大且易于使用的开放式设计源代码。免费下载使用开发界面,闪存32 KB存储空间可满足设计要求,与电机控制板兼容,使电路更简单、更稳定,同时价格也相对较低。
3.2 A4988步进电机驱动芯片
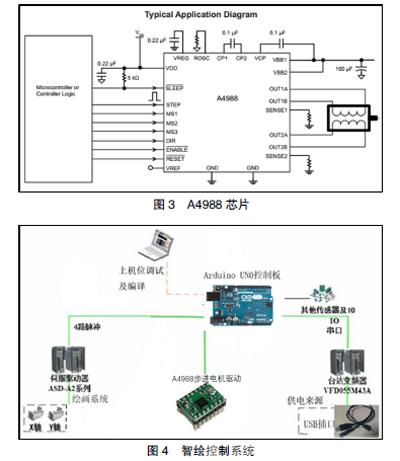
双极步进电机以全步长,工作模式细分为1(000),1/2(100),1/4(010),1/8(110)和1/16(111),输出驱动性能高达35 V和±2 A。A4988包括一个固定的关断时间电流调节器,可在慢速或混合衰减模式下工作,工作模式如图3所示。
3.3 绘图控制系统原理设计
智绘控制系统采用自动化控制,应用“单核多路”的控制方法,即一个Arduino UN0控制器,操控智绘机器人系统中若干组成模块的正常运作,控制系统原理及硬件组成如图4所示。
3.4 控制系统代码设计片段
4 智绘机器人设计与实现
4.1 基本写字绘画技能
通过上机位调试及编译对Arduino UN0控制,用四路脉冲控制伺服电机控制,步进电机在X、Y轴控制绘画笔,绘图笔会根据控制进行相应的移动,在纸上留下痕迹就是我们所需要的字体。修改penUp和penDown的变量,对伺服电机进行调整,进而控制笔头完成我们所想要绘制的字和图案。通过在实验室对智绘绘图机器人进行测试,各项指标均符合设计要求,只需在部分细节上进行优化处理。
4.2 激光雕刻器
(1)激光雕刻器。根据项目要求,添加了激光雕刻。激光雕刻就像使用计算机和打印机在纸上打印一样简单。可以在Windows环境下利用多种图形处理软件。设计和扫描的图形(如Corel DRAW)和各种CAD文件的矢量化图形集合可以轻松地“打印”到雕刻机上。
(2)激光雕刻的特点。{1}雕刻范围广泛:具有超强的适应能力,可以在不同材质的原料上进行工作。{2}速度快:激光雕刻比普通雕刻方法快100多倍,确保重复雕刻的准确性。{3}精度高:该产品的高精度,精密雕刻可以在受雕刻材料氧化、变形和热膨胀影响相对较小的区域内进行,清洁且无污染。{4}耗能少:雕刻过程简单,能力转换环节少,原材料损耗少,提高工作效率。{5}自动化程度高:激光雕刻和自动控制技术的结合使控制过程易于自动化。
(3)激光雕刻的参数。激光头参数见表1。
4.3 数控程序
使用的Codebender是一个在线Arduino IDE,它允许直接在浏览器中编程Arduino板,并使用Codebender将它们嵌入到Arduino板上。通过对penUp和penDown变量的修改,对伺服电机进行上下控制,从而达到繪制笔上下的效果。
5 总结
本文研究了绘图机器人利用激光在钢材、釉面、石材等表面的字符标记问题,深入研究了多自由度系列机器人的机械结构、正向和反向运动学、工作空间、速度雅可比行列式、动力学和轨迹规划[3]。并对在空间平面、柱面及球面的多角度操作问题做了详细的实验报告。结构设计采用“模块化+移动+可变比例”设计概念,有定点和移动两种工作模式。设计扩展了应用范围和广度,可以进行简单重复的工作,为未来机器代替人工打下基础[2]。
智绘绘图机器人综合了计算机、控制论、仿生学等多学科而形成应用于表面绘制的技术产品,其应用场景广泛,除了传统的纸质书写、绘画,还有釉面绘画、钢材喷绘、石材雕刻、玻璃喷绘、墙体喷绘等。智绘机器人系统利用重构模块的机器人,对于辅助人类书写、画图、雕刻、提高书写速度与质量具有重要意义,也是对多种人工智能技术的创新性与集成性应用。
参 考 文 献
[1]张传剑,李春梅,韩军.MOTOMAN UP6机器人写字功能设计与实现[J].机械制造与自动化,2011,40(2):119-121.
[2]Crainic M F,Preitl S,Sandru L A,et al.Secure handwriting using a robot arm for educational purpose[C].Methods and Models in Automation and Robotics(MMAR),2014 19th International Conference On.IEEE,2014:58-63.
[3]边楼伟.Nao机器人写字学习方案[J].中国科技信息,2017(10):43-44.
[4]陈玉敏,谢玮,孟宪民,等.智能写字机器人设计[J].计算机测量与控制,2016,24(1):266-268.
猜你喜欢
商业评论(2022年4期)2022-05-05
教育教学论坛(2022年13期)2022-04-24
大学·教学与教育(2022年3期)2022-04-15
西部交通科技(2021年9期)2021-01-11
中国建筑金属结构(2019年4期)2019-05-15
汽车博览(2019年5期)2019-05-07
中学语文·大语文论坛(2018年7期)2018-08-23
分析化学(2018年12期)2018-01-22
消费电子(2015年10期)2015-09-10
中国信息化·学术版(2013年1期)2013-05-28
