
无人机LiDAR 数据在公路勘测中的应用
2020-04-13 02:19陈国柱
工程技术研究 2020年2期
陈国柱
(莆田市城乡勘测设计研究院,福建 莆田 351100)
近几年,随着社会科技的快速发展,LiDAR 测量系统技术得到了巨大的科技支持。有人机搭建LiDAR 测量系统,可以有效地测量道路、田地、建筑物以及未来得4D 产品制作的精确测量,并取得了良好的经济效益。但是,由于天气、起降和航空管制等因素影响,限制了有人机的使用,导致使用有人机测量工程时的成本和时间都面临着很大的挑战。这时,具有体积小、测量工程不受云层限制的测绘型的无人机应运而生。无人机属于低空飞行器,可以随时起降,其较高的机动性能有效地保障任务的执行,提高工作效率,并以灵巧、便捷、成本低和结构简单等优点有效弥补了有人机搭载LiDAR 测量系统平台产生的不足。文章通过利用无人机搭载LiDAR测量系统平台调研福建东部的某山区公路和植被覆盖区的勘测工程,来对数据获取、处理和精度验证这三个方面进行详细分析,总结出了无人机搭载LiDAR 测量系统平台的优点,进而进行技术的推广和应用。
1 实验区慨况
实验区位于福建东部,当地经济较为发达,地势总趋势为东北高、西南低,测线长为56km,带宽为600m,沿线地面高程为50 ~300m。该地区地形地貌较为复杂,且属于亚热带季风区,具有雨量充沛、气候温和、阳光充足等特点。
2 项目数据获取
2.1 航线设计
在正常情况下,根据国家航线设计标准要求,原始激光点云间隔取平均距离小于1.5m,正射影象图(DOM)的像素地面分辨率取小于0.2m。此外,若出现云密度和影像分辨率相同的情况,则参考无人机作业与运五飞行平台作业的分析结构,如表1 所示。
2.2 基站布设
该项目的主要设备是型号为Trimble5700 的GPS 接收机,数据采集工具是经过定期校验的4 台高精度、采样间隔为1Hz 的双频GPS 设备。该项目根据每个地面基站覆盖半径为25km 的圆面积进行计算,总共需要搭建2 个基站,布设要求如表2 所示。线路的走廊带以及测量范围可根据工程可行性报告来确定,以其来进行航线设计。
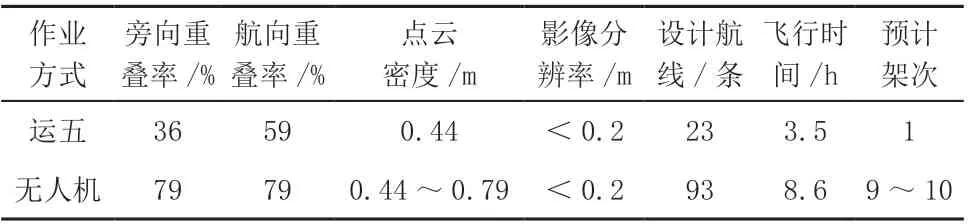
表1 无人机飞行平台作业与运五飞行平台作业对比

表2 基准站三维坐标
2.3 工作效率
有人机搭载LiDAR 设备进行航空摄影测量前需进行空域申请,经航空管理相关部门审核,获得空域批文,经军方和民航航空管制双方协调同意后,飞机才能起飞作业,飞行效率受多方面条件的限制,效率较低,但航测工作量小。无人机航空摄影测量作业可就地起降,延长了航空作业时间,飞行协调由航测单位完成,空域协调相对简单。本项目航测有效数据获取时间为10 个架次,完成效率较高,但航测工作量较大。
3 获取点云数据和处理
3.1 利用POS 数据处理
德国IGI 公司生产的IMU/DGPS 系统和研发的GrafNet、GrafNav 软件进行POS 数据解算作为有人机的数据处理,精确度相对较高。作为无人机的数据处理主要使用Applanix 公司生产的POS/AV 系统和最新研发的POSPAC 软件进行POS 数据解算,但精确度不够高。有人机和无人机数据处理都要提供必要的基站三维控制网成果和参考面检核成果。
3.2 原始点云数据
无人机搭载LiDAR 系统作业获取单航线点云数据分布,与有人机搭载LiDAR 系统作业方式相比,无人机搭载LiDAR 作业方式具有以下特点:一是由于无人机激光扫描仪采用椭圆轨迹扫描方式,具有70°×40°扫描角视场角,单条航带宽度也比较大。综合影像考虑时,单条航线有效覆盖范围通常为200 ~300m,但实际航飞数据宽度通常为400 ~600 m,航线的旁向点云重叠非常大。二是航带边缘处激光点云较稀疏,航带正中间的激光点云最密集。三是无人机搭载LiDAR 系统飞行平台受风力、气流影响较大,激光点云分布不规则。
3.3 航带点云配准
有人机LiDAR 系统分析数据获得差分GPS 解算结果后联合IMU 数据进行共同处理,已测量的偏心分量值利用LiDAR 系统校检,进而输出的点云数据匹配误差值较小。通过MicroStation 与Terrascan 软件中的数据,处理由于卫星星历不佳而造成航带误差多但能够呈现规律分布的可实现航带点云的配准。
无人机很难完全消除经MicroStation 与Terrascan 软件中的数据处理,LiDAR 数据通过点云数据产生部分航线的接边误差。那么,消除航线接边误差的有效方法是在点云数据预处理完成后,结合实测参考面与特征标志点统计出航带点云匹配误差进而航带的平差计算。
4 数据精度分析
通过对野外建筑物、植被区、田地和道路等地物地形考察,使用RTK、全站仪等测量仪器进行实测,而后进行精度验证分析得出的2823 实测数据和经过计算机软件处理后的三维激光点云数据,对比内容如表3、表4 所示。其中,统计有效地物点为2756 个,与误差进行对比得出剔除率为2.4%。

表3 LiDAR 点云数据与外业实测数据差值对比

表4 LiDAR 点云数据与外业实测数据
根据表3 可以得出,主要分布在植被覆盖度高的地区差值>1m 的点占总数的4.9%;1≥差值≥0.5 的点占总数的11.08%,0.5≥差值0.3 的点占总数的21.9%,可以看出无人机LiDAR 点云数据具有较高的可靠性和实用性。同理,根据表4 可知,从LiDAR 点云数据具有较小的均方根和标准偏差可以说明无人机搭载的LiDAR数据测量精度比较符合实际。另外,可以根据均方根为0.278,公路道路勘测测量规范、低空飞行器摄影测量规范和地形图航空摄影测量规范等相关制度要求,得出山地、丘陵画图的具体规定,完全满足1 ∶500、1 ∶1000、1 ∶2000 的测量规范。
选取分布较为稀疏植被的建筑物、田地和道路区域和分布植被较为密集的山区进行误差统计分析,结果如下:(1)分布较为稀疏植被的建筑物、田地和道路区域。用无人机搭载的LiDAR 数据与在分布较为稀疏植被的建筑物、田地和道路区域采集398 个数据点进行计算比较得出均方根误差为0.246,43 个差值>0.3 占比为10.8%,两者差值较小。(2)分布植被较为密集的山区。用无人机搭载的LiDAR 数据与布植被较为密集的山区采集的269 个三维数据点进行计算比较得出有差值>0.35m 限差有132 个占比为44.6%,中误差为0.465,差值较大。
5 结束语
作为一种新的LiDAR 数据获取方式,无人机搭载LiDAR 测量系统随着科学技术的发展和社会日益需求量增大而不断扩大。无人机LiDAR 系统对机场和天气条件要求不断变小,能够在短时间内获取地面三维数据,且其稳定性也在不断提高,有效弥补了有人机LiDAR设备的不足,这些优势使得其在工程中逐步扩大应用范围。得出以下结论:(1)《低空空域使用管理规定(试行)》实施后,依靠无人机灵巧、便捷、成本低和结构简单等优点,无人机对地面摄影作业可就地起降、随时随地起降,延长了在空中摄影的作业时间,航测单位对飞行协调时间、地点能够单独完成,使用空域协调变得相对简单。(2)无人机飞行高度低,速度可控,观测探头对植被的穿透性更好,获取激光点云密度更大,精度更高。(3)目前,无人机搭载的LiDAR 系统技术还处于研发初级阶段,POS 系统性能、数据处理、摄影的图像和声音清晰度等方面各项技术还需要进一步技术提升。
猜你喜欢
心理学报(2022年4期)2022-04-12
气象水文海洋仪器(2021年4期)2021-12-11
水泵技术(2021年3期)2021-08-14
小哥白尼(神奇星球)(2021年12期)2021-03-08
中成药(2017年6期)2017-06-13
太空探索(2016年5期)2016-07-12
太空探索(2016年6期)2016-07-10
中国惯性技术学报(2015年1期)2015-12-19
西华师范大学学报(自然科学版)(2015年3期)2015-02-27
中国钢铁业(2012年11期)2012-08-22
