某型直升机悬停时自动上升现象分析与排除
2020-04-12 13:13曹永辉李晶吴宏宇卓伟伟
航空维修与工程 2020年10期
曹永辉 李晶 吴宏宇 卓伟伟
摘要:某型直升机在试飞悬停时,在无施加操纵输入时出现自动上升现象。通过分析旋翼和操纵系统原理,查列故障树,对涉及的有关部件进行检查、验证、排除,确定了引发该现象的原因,确保了飞行安全。
关键词:直升机;悬停;自动上升;分析
Keywords:helicopter;hover;automatic ascent;analysis
0 引言
一架某型直升机C检修理后试飞过程中,在无人为操纵介入的状态下出现悬停自动上升的现象。
现象描述:直升机在低高度、有地效的状态下,进入悬停并保持稳定后,飞行员松开对桨距杆的控制,自动驾驶仪高度通道未接通,悬停高度呈现波动状态,且有悬停高度自动上升的趋势,期间与总距操纵并联的CLP传感器输出无变化,后由飞行员人为操纵桨距杆,上升情况停止;脱离地效后,直升机采取同样的操纵方式悬停保持一段时间后,直升机高度由波动转为自动上升,期间与总距操纵并联的CLP传感器读数无变化,后由飞行员人为操纵桨距杆,上升情况停止。
使用故障树形式对该特殊现象进行分析,解析原理并给出调试方法,是本文研究探讨的目的。
1 该型直升机旋翼操纵系统构成原理
该型直升机属于单旋翼带尾桨的直升机,其操纵系统包括纵向、横向、航向和总距操纵。操纵系统的部件主要由驾驶舱内的驾驶杆、总距杆、脚蹬,操纵箱组件(四通道舵机、联动机构、相位仪、混合装置)以及主助力器、自动倾斜器、尾助力器及拉杆、摇臂和钢索等组成,如图1所示。
直升机在总距操纵过程中,飞行员改变桨距杆的位置,由横轴和拉杆传递到操纵箱,经过串联在系统内的舵机和相位仪作用,通过变距混合装置使传动平台上的拉杆向助力器输入操纵信号,带动自动倾斜器上下滑动,机械联动至旋翼桨毂改变桨距角;同时与总距联动的CLP传感器因桨距杆位置变化,产生信号传递至发动机电调,发动机功率同步变化匹配桨距角变化,使直升机实现上升或下降动作。
2 故障树
该机试飞过程中,当直升机进入悬停并保持稳定后,飞行员将手离开桨距杆,自动驾驶仪高度通道未接通,在无操纵介入的状态下,直升机出现自动上升的现象,后飞行员人为控制桨距杆,上升情况停止。
在自动上升高度期间,通过驾驶舱综合显示器观察判读,与总距联动的 CLP传感器数值无变化,发动机扭矩、旋翼转速等参数轻微波动。
根据上述现象,分析列出图2所示故障树。
3 针对现象开展的验证工作
直升机自动上升现象出现后,依据故障树分析,对相关系统部附件进行检查,并开展多个场次的调整试飞,以期找到原因。
1)舵机检查
该型机操纵系统配装的舵机为四通道分离式电液舵机,起电液转换和液压放大作用,外场使用中故障率高,对操纵系统影响较大,故首先对舵机进行检查。
在试验台上对该机舵机进行校验,对总距通道伺服阀、配平阀和开环装置进行调整和更换,以排除因舵机性能不稳定造成的操纵线系漂移。
试飞中断开舵机液压,将舵机性能影响从操纵线系中屏蔽,故障现象未消失。
2)操纵线系安装状态检查
考慮到总距操纵为机械联动,安装时存在异常间隙会影响直升机高度保持时的操纵精准度,故对该机整个操纵线系安装状态进行了检查。复查主旋翼操纵线系数据和主桨毂安装情况,复查与总距联动的尾桨操纵线系、主旋翼操纵联动组件及尾桨5°数据,复查水平测量/称重情况,数据符合技术要求,未发现异常。
3)助力器检查
该型直升机助力器串联在操纵线系中,若助力器存在异常,会导致操纵不稳定。复查助力器分油活塞情况,助力器无内腔串压,工作稳定。
4)操纵线系阻尼特性和摩擦力检查及调整
为稳定直升机操纵性能,对该机的总距阻尼器和总距摩擦装置进行微调,使总距操纵线系上的阻尼特性和摩擦力增大。
5)旋翼系统部件安装状态检查
检查该机主桨毂、自动倾斜器的安装和连接,未发现异常间隙,后期更换主桨毂和自动倾斜器。
6)旋翼锥体和动平衡状态调整
分析直升机悬停时稳定性的必要条件,对旋翼锥体进行了检查和微调,后期对该机安装的主旋翼重新进行动平衡调整和串件,未能改善自动上升现象。
7)飞控系统检查
对飞控系统的飞控计算机、舵机放大器、离合传感器、惯性测量部件、速率陀螺组进行校验,未发现异常情况。在试飞过程中试验性断开自动驾驶仪,排除飞控系统故障的可能。
8)总距CLP传感器检查
总距CLP传感器与操纵线系并联,负责将机械操纵的角度转化为电信号,传递至发动机电子调节器进行发动机油门控制,当CLP传递信号不稳定时,有可能导致发动机功率不稳定,从而产生悬停高度变化。
对该机CLP传感器进行检查、清洗,并对传感器安装支座进行加强,消除其安装结构的弹性变形,以消除CLP传递信号不稳定的可能性。
9)发动机放气活门调整
针对该机发动机特点,结合试飞时大气温度,在工艺规定范围内,增大了发动机放气活门关闭点转速,悬停时自动上升现象产生变化,由10m高度悬停后自动上升转变为10m高度能稳定悬停,20m高度以上出现自动上升,可见发动机放气活门性能与该现象存在一定关联。
10)与同型其他直升机的对比验证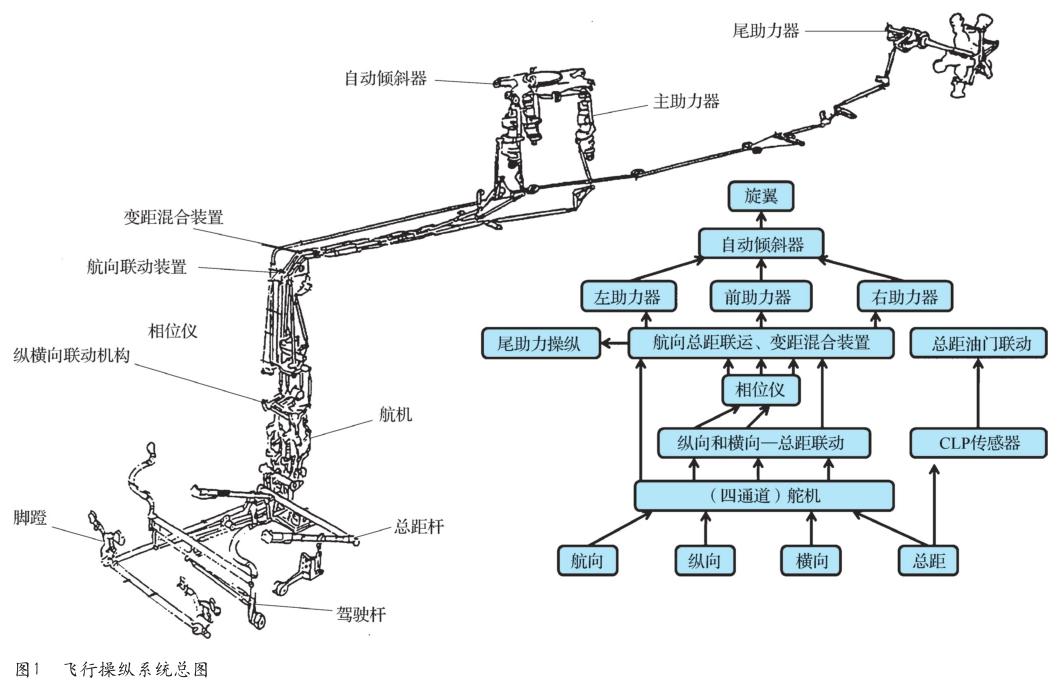
与另外两架进入试飞阶段的直升机进行对比飞行验证。选取相同机型、相同重量、相同场次、相同操作流程,试飞时风速在1.5m/s以下,直升机进入稳定悬停,松开桨距后持续试飞时间不超过2.5min以控制重量变化,通过判读飞参来分析悬停状态。飞参记录截取直升机进入悬停状态(CLP稳定保持不变)的时间段,记录直升机高度、扭矩、旋翼转速和升降速度。
对3架机当天同时飞行时的飞参采集数据进行判读分析,在无地效作用(20m以上)的情况下,3架机稳定悬停后均出现直升机自动上升现象。上升过程中显示旋翼转速存在波动,发动机扭矩伴随旋翼转速波动而变化,但该故障机上升较明显。
由此判断在无操纵介入的状态下,长时间悬停过程中直升机出现自动上升的现象是客观存在,不属于特殊故障。
4 导致该现象的原因
从现象来看,在无人为操纵输入情况下直升机自动悬停上升的根本原因是旋翼产生的升力大于直升机的重力。导致该现象的直接原因是该型直升机装用的发动机功率裕度较大,在桨叶角受气流等因素影响出现微小变化后,发动机输出功率随动变化。
参考飞参数据进行分析,自动上升过程中总距CLP数值无变化,发动机扭矩、旋翼转速等参数轻微波动。当桨叶角向上时,发动机增加功率大于需求,当桨叶角减小时,发动机减小的功率小于减弱需求。
自动上升现象与旋翼转速波动导致的发动机扭矩波动和发动机功率稳定性相关,发动机功率越稳定,自动上升现象越轻微,发动机扭矩波动越小,直升机悬停状态越稳定。
为防止该型机飞行时出现不必要的意外情况,建议悬停飞行时如无必要,飞行员的手不能离开桨距杆。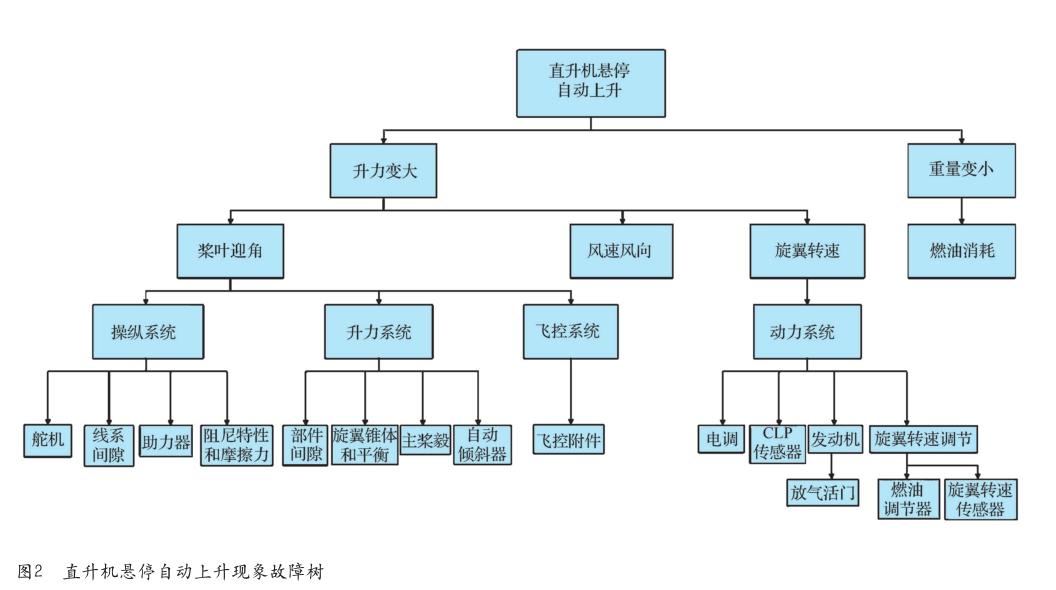
5 结束语
在该型直升机的飞行手册和维护手册中,有关在无操纵介入的状态下直升机出现自动上升的情况均无明确的相关说明,这属于非正常操作下产生的现象。为了保证外场作训使用,通过研究该现象产生的机理,以故障树形式分析引发此现象的可能原因,分系统隔离问题因素,最终定位原因,消除了飞行员的疑虑。本文为分析该型直升机悬停自动上升现象提供了可靠经验和技术支持。
猜你喜欢
红蜻蜓(2021年3期)2021-07-14
科学与财富(2021年36期)2021-05-10
孩子(2020年12期)2020-01-06
作文评点报·低幼版(2018年17期)2018-07-12
财经理论与实践(2014年1期)2014-04-02
第二课堂(小学版)(2009年9期)2009-11-13
中学英语之友·高二版(2008年2期)2008-04-08
航空知识(2001年5期)2001-06-12