系留升空平台光电探测目标的坐标转换误差分析
2020-04-12 14:16
应用光学 2020年6期
(西安应用光学研究所,陕西 西安 710065)
引言
目前,无人机平台、系留升空平台功率的费效比越来越低,相当于未来无人升空平台对目标高精度定位的指标要求[1-2]越来越高。光电探测系统是无人升空平台最基本的任务执行单元,通过光电吊舱内部的光电探测系统可对周围的目标进行侦察、监视、跟踪及识别、测距等,对各种地面目标、空中目标进行侦察定位,给出侦察目标的相对位置和运动状态[3]。
考虑到空中平台上惯导系统和GPS组合导航系统的误差相对确定,升空平台自身的定位精度相对较高,因此,本文主要讨论光电探测系统对目标的定位精度以及误差的坐标转换过程,选取对定位精度有较大影响的28个参数变量,推导出升空平台坐标系下目标定位误差的数学模型,结合Monte Carlo 误差分析方法,更直观地评价目标定位的误差因素影响程度。根据误差产生过程,分析了各误差因素对升空平台下目标定位精度的影响,给出减小光电探测系统目标定位误差的措施。
1 光电吊舱的组成和定位误差
1.1 组成结构
光电吊舱主要由光电探测系统、机械系统和伺服控制系统组成。光电探测系统实现空间测量与成像,机械系统提供框架和结构支撑,伺服控制系统负责轴系控制。光电探测系统包括:红外传感器、CCD 相机、激光测距仪和光端机等,可以实现多光谱综合测量和传输。机械系统主要包括:光机座组件、方位测角组件和俯仰测角组件等。伺服控制系统主要包括:电源组件、伺服控制电路、方位电机和俯仰电机等。光电吊舱组成图如图1所示。
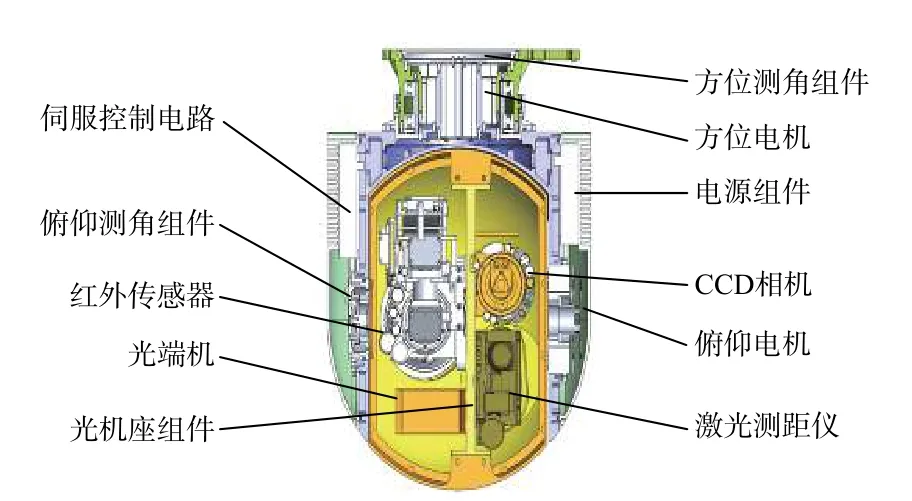
图1 光电吊舱组成图Fig.1 Structure diagram of photoelectric pod
1.2 定位误差
定位误差一般是指被观测目标在大地坐标系下的理想坐标值与实际坐标值的偏差。目标定位功能是指系统平台探测系统和导航系统所提供目标大地坐标的能力,一般采用经度、纬度和高程差来表示[4]。本文主要研究基于升空平台坐标系下光电探测系统对目标的定位精度问题[5]。
基于系留升空平台下的光电吊舱的定位误差是指光电探测系统的指向误差和光电吊舱相对于升空平台的对准误差。
指向误差是指目标光轴的理想指向角与实际指向角之间的偏差值,我们把所有光轴轴系、俯仰轴系、方位轴系所引起的误差变化统称为指向误差。首先,把目标光轴在基座坐标系下的观测指向角设为为方位位置传感器测量值,为俯仰位置传感器测量值。由于设计加工、机械装配和框架运动等引起的轴系间的几何误差,造成目标光轴的实际指向角为(α,β),如图2所示。那么,指向误差由方位指向误差 δα和俯仰指向误差δβ来表示,即和其中δα和δβ包括误差均值和标准差。

图2 指向误差Fig.2 Pointing error
对准误差指光电吊舱平台与升空平台安装时存在的方位对准误差和水平调平误差,以及减震器的角振动误差。文中光电平台与升空平台之间为刚性连接,不考虑减震器的振动误差问题[6]。
2 光电吊舱坐标系下目标定位误差分类
目标定位精度是评价光电探测系统性能的一项综合性技术指标,与指向精度的分项指标直接相关[7]。作为复杂的光机电一体化装备,光电探测系统目标定位误差的来源众多,且误差性质和影响规律各异。按光电吊舱组成结构进行分析,影响目标定位精度的误差主要有光电探测系统的各种指向误差、光电探测系统与载体导航系统的对准误差、载体导航系统的测量误差,以及环境等因素引起的误差等。光电探测系统误差源统计如表1所示。通过对目标定位误差的分析和研究,可以从本质上解决光电探测系统的精度问题。
1)光电吊舱内部探测系统主要误差。光学系统中CCD摄像机、IR 红外热像仪、LASER 激光测距机等探测器由于自身的光轴晃动或成像等造成的误差,以及各探测器之间由于光轴平行性差异造成的几何误差。机械框架中光轴、俯仰和方位轴系在设计、制造和装配过程中产生的几何误差,如轴系垂直度误差、回转误差。探测器测量中方位和俯仰等位置传感器的零位误差和测量误差,以及目标探测和跟踪过程中产生的脱靶量误差等。
2)光电吊舱与升空平台之间的对准误差。主要包括方位对准误差和水平调平误差。由于光电吊舱和升空平台之间刚性连接几乎没有相对移动,除了固定的安装误差外,不存在因安装减震器引起的角振动误差问题。同时环境因素误差(如温度、重力、风力、大气、振动和冲击等因素)也会对上述误差有一定程度的影响[8]。
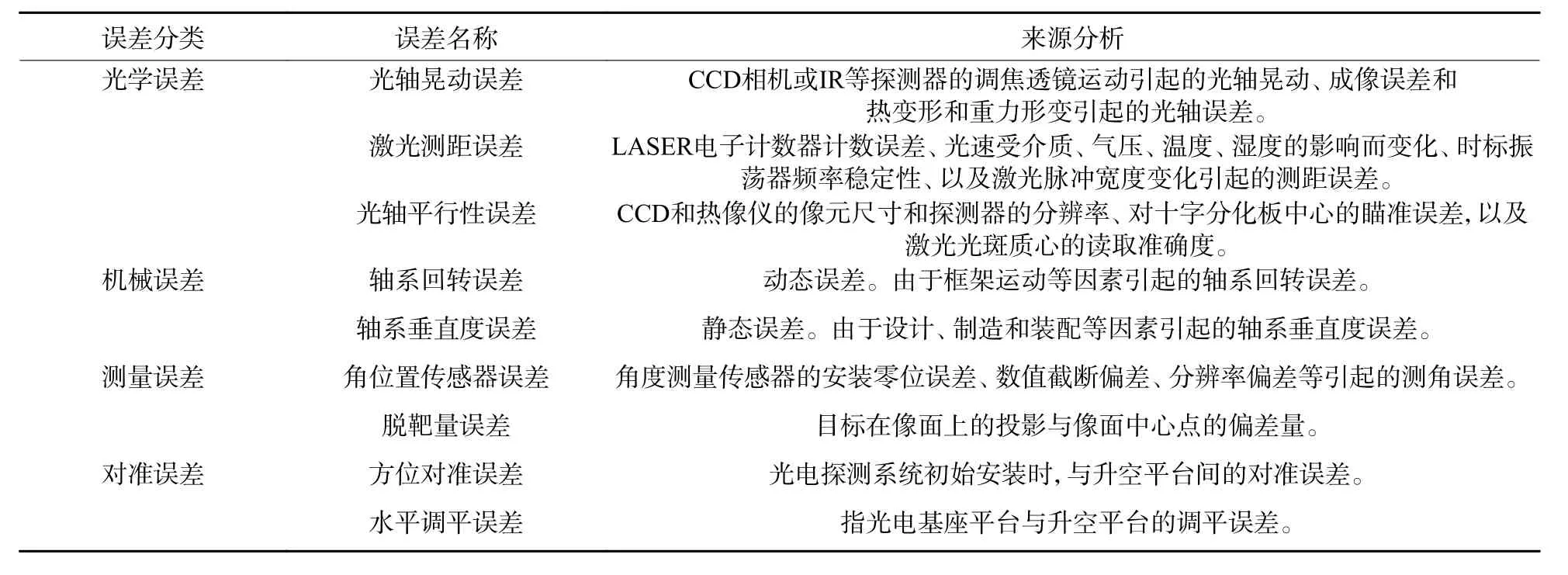
表1 光电探测系统误差源统计Table1 Error source statistics of photoelectric detection system
3 升空平台下光电吊舱目标定位误差的综合建模
本文根据误差源的作用方式进行分析,建立了各探测器坐标系,推导出各误差坐标系之间的齐次转换矩阵,得到光电吊舱坐标系下目标定位误差模型,并给出分项误差量化指标。
3.1 建立误差坐标系
根据光电吊舱探测器轴线和机械框架的组成结构建立探测器坐标系和框架坐标系。从目标坐标系(L系)到光电探测系统基座坐标系(B系)的两轴框架误差坐标系,建立目标定位误差矩阵转换模型,光电吊舱系统误差坐标系定义如图3所示。
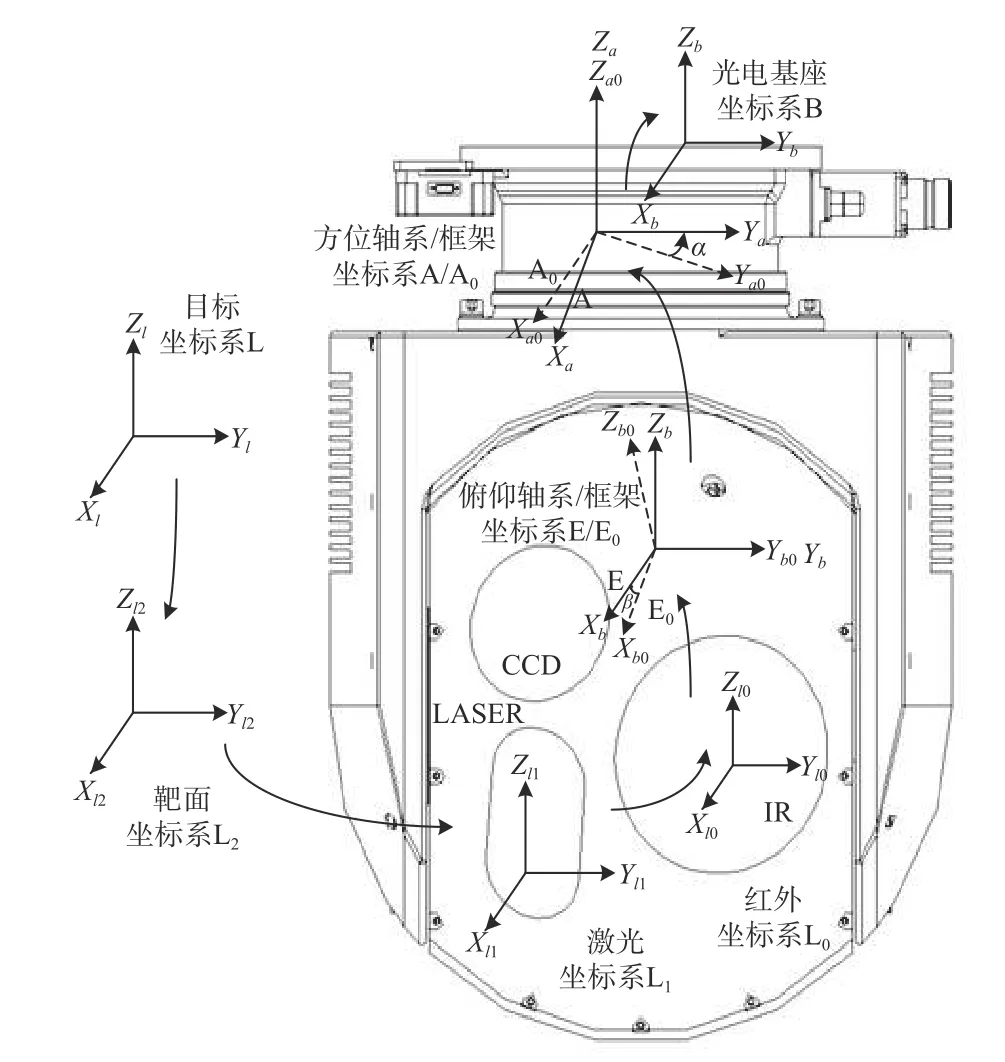
图3 光电吊舱误差坐标系定义Fig.3 Error coordinate system definition of photoelectric pod
1)像平面坐标系(L2系)
我们通过光轴调校,针对远距离目标测距、成像可实现三光合一,使目标成像聚焦在类似一个焦平面上。L2系固联在光学成像探测器的焦平面上,原点为目标在焦平面成像的形心位置,Ol2Xl2轴沿目标光轴方向指向目标。
2)激光测距坐标系(L1系)
L1系原点定义为光具座中心,Ol1Xl1轴沿激光指示方向。采用激光测距机测量值D来表示目标相对光电探测系统的距离[9]。
3)成像探测器坐标系(L0系)
L0系原点定义为光具座中心,Ol0Xl0轴沿成像探测器CCD 或IR的光轴方向。L0系用来表示探测器光轴在惯性空间内的姿态,是光电探测系统中始终需要稳定的坐标系。在理想条件下,L系、L2系、L1系、L0系与E系的坐标轴是相互平行的,但由于误差的作用,这些坐标系之间存在着一定的变换关系。
4)俯仰轴系坐标系(E系)
E系原点定义为两轴机构的中心,随俯仰轴系运动。OeYe轴沿俯仰轴的实际转动方向,采用俯仰位置传感器测量值β来表示E系与 E0系之间的旋转角度。
5)俯仰框架坐标系(E0系)
E0系 原点定义为两轴机构的中心,Oe0Ye0轴沿俯仰位置传感器零位方向,Xe0Oe0Ze0为俯仰框架安装平面。在理想条件下 E0系与A系是一致的。
6)方位轴系坐标系(A系)
A系原点定义为两轴机构的中心,可随方位轴系运动。OaZa轴沿方位轴的实际转动方向,采用方位位置传感器测量值α表示A系与 A0系之间的旋转角度。
7)方位框架坐标系(A0系)
A0系原点定义为两轴机构的中心,Oa0Xa0轴沿方位位置传感器零位方向,Xa0Oa0Ya0为方位框架安装平面。理想条件下 A0系与B系是一致的。
8)光电基座坐标系(B系)
B系原点定义为光电基座的中心,ObXb轴沿方位位置传感器零位方向,XbObYb为光电基座平面。
9)升空平台坐标系(S系)
S系原点定义为升空平台的三轴机构的中心,OsXs轴与本地测姿坐标系的北向角重合,XsOsYs为升空平台的水平安装面,与本地测姿坐标系的北-东面平行。
3.2 误差坐标系转换矩阵
在误差分析的基础上,详细推导各误差坐标系之间的误差转换矩阵[10]。
1)光轴轴系误差
光轴轴系误差为安装在光具座上的光学探测器彼此之间的误差,主要包括:激光测距误差和目标脱靶量误差、光轴晃动误差和平行性误差、光轴垂直度误差等。
根据上述误差坐标系的定义,L2系的Ol2Xl2轴沿目标光轴方向指向目标,而 L1系的Ol1Xl1轴沿激光指向,如图4所示。

图4 光轴脱靶量误差Fig.4 Optical axis miss distance error
从L系到L1系的激光测距误差和目标脱靶量误差变换矩阵为

即:
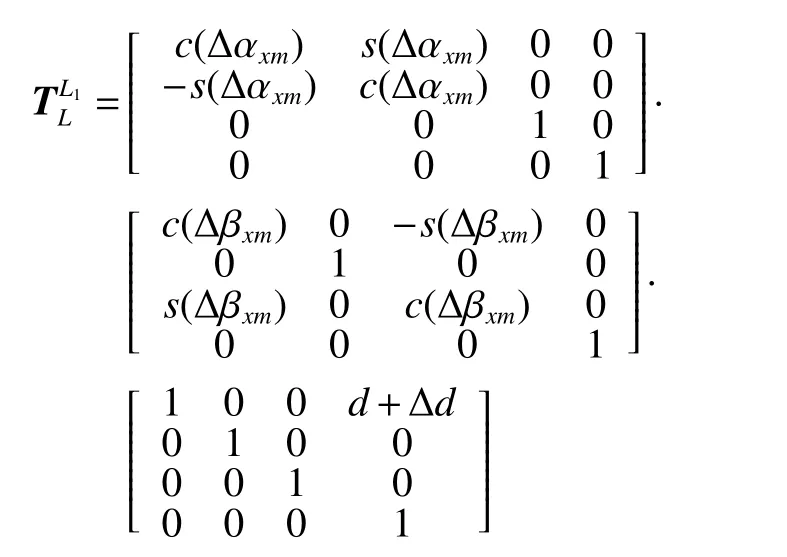
设激光测距值和测距误差为d+∆d;∆αxm和∆βxm为目标脱靶量∆X和∆Y转换得到的角度值,由图4可得脱靶量的反正切公式为
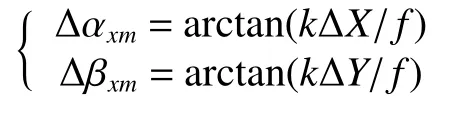
式中:k和f分别为成像探测器的像元尺寸和观测焦距值。L系沿OlXl轴平移d+∆d得到L2系,再分别绕Y轴和Z轴旋转 ∆βxm和∆αxm角度得到L1系。由图5可知,L1系的Ol1Xl1轴激光指向与 L0系的Ol0Xl0轴成像探测器光轴指向之间存在着光轴晃动误差和平行性误差。那么两个坐标系之间的误差变换矩阵为

即:
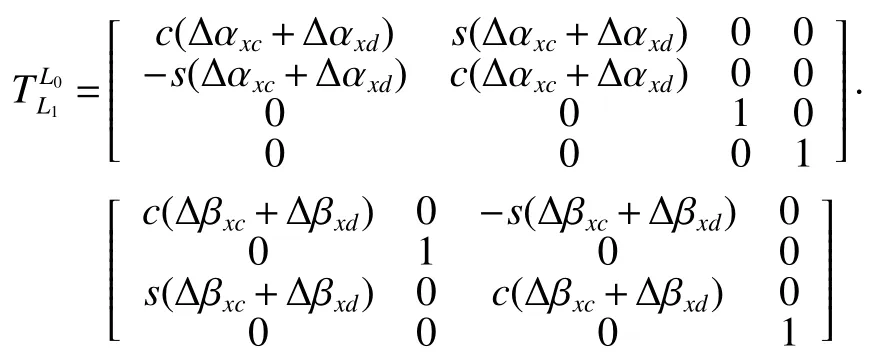
式中:∆αxc和∆βxc为多探测器之间的光轴平行性误差;∆αxd和∆βxd为成像探测器自身的光轴晃动误差。L1系分别绕Y轴和Z轴旋转 ∆αxc+∆ αxd和∆βxc+∆βxd角度得到L0系。

图5 光轴平行性和晃动误差Fig.5 Optical axis parallelism and sloshing error
由于光电探测系统采用两轴框架,光轴轴系相对俯仰轴系没有相对运动,即不存在光轴回转误差。那么 L0系与E系之间只存在光轴垂直度误差,
如图6所示。其误差转换矩阵为

即:
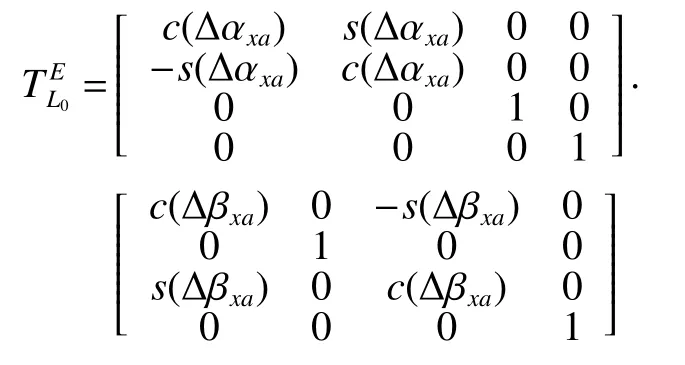
式中:∆αxa和∆βxa为光轴垂直度误差。L0系分别绕Y轴和Z轴旋转 ∆βxa和∆αxa角度,转换为俯仰轴系坐标系E。
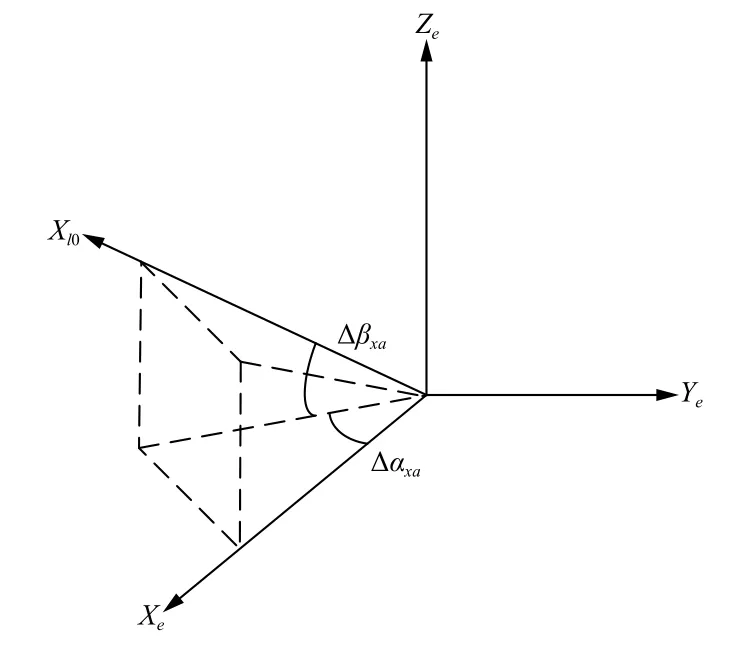
图6 光轴垂直度误差Fig.6 Optical axis perpendicularity error
2)俯仰轴系误差
俯仰和方位轴系误差为两轴框架在设计、制造和装配过程中产生的几何误差,主要包括:框架运动引起的回转误差和位置传感器误差,以及框架装配引起的垂直度误差等,如图7所示。当俯仰轴系坐标系E 相对于俯仰框架坐标系 E0运动时,其误差转换矩阵为

即:
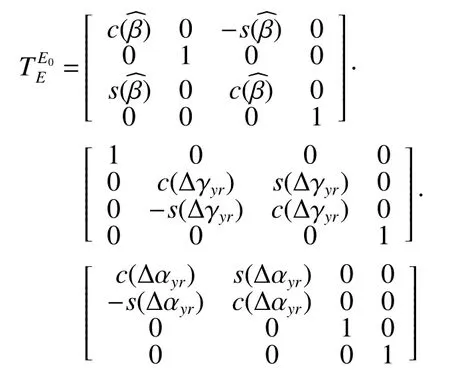
式中:∆ αyr和∆ γyr为俯仰轴回转误差;∆βc+ ∆βz为俯仰轴系位置传感器的测量值,由多个部分组成。其中β为两轴框架的理想俯仰角;∆βe、∆βm、∆βc和∆βz分别为俯仰位置传感器的偏心误差、分辨率误差、截断误差和零位误差。那么,E系分别绕Z轴、X轴和Y轴旋转∆αyr、∆γyr和β,转换得到E0系。
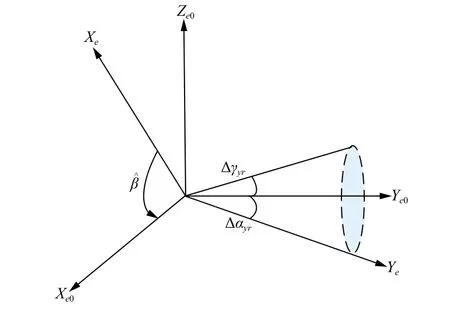
图7 俯仰轴回转误差和位置传感器误差Fig.7 Pitch axis rotation and position sensor error
E0系与A系之间存在着俯仰轴的垂直度误差,如图8所示。其误差转换矩阵为

即:
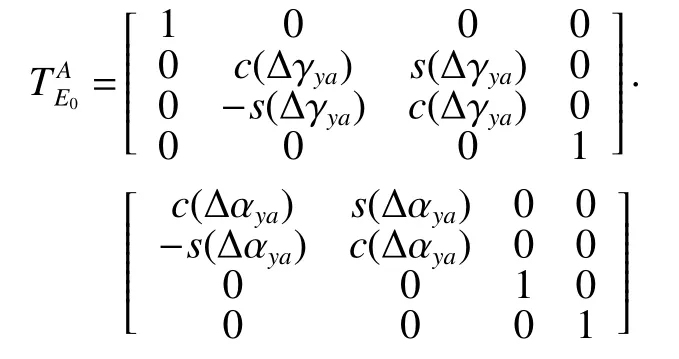
式中:∆αya和∆γya为俯仰轴垂直度误差。E0系分别绕Z轴和X轴旋转角度 ∆ αya和∆ γya,转换得到A系。
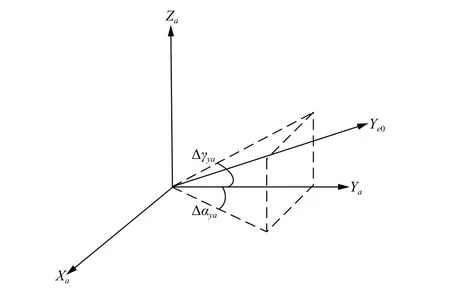
图8 俯仰轴垂直度误差Fig.8 Pitch axis perpendicularity error
3)方位轴系误差
方位轴系误差与俯仰轴系的误差类似,当方位轴系坐标系A 相对于方位框架坐标系 A0运动时,如图9所示,其误差转换矩阵为

即:
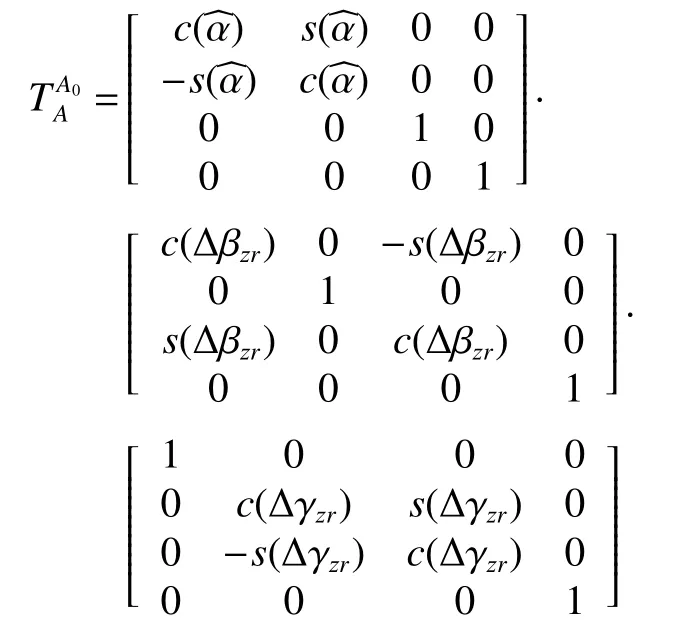
式中:∆γzr和∆βzr为方位轴回转误差∆αm+ ∆αz为方位轴系位置传感器的测量值,由多个部分组成。其中,α为两轴框架的理想方位角,∆αe、∆αm、∆αc和∆αz分别为方位位置传感器的偏心误差、分辨率误差、截断误差和零位误差。A系分别绕X轴、Y轴和Z轴旋转 ∆γzr、∆βzr和得到A0系。
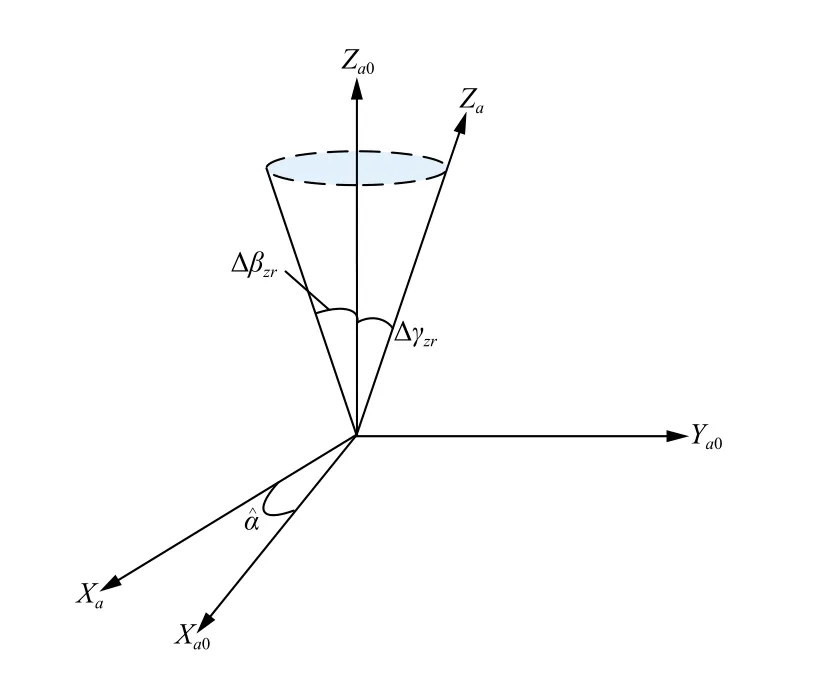
图9 方位轴回转误差和方位编码器误差Fig.9 Azimuth axis rotation and azimuth encoder error
A0系与光电探测系统基座坐标系B之间存在着方位轴垂直度误差,如图10所示。其误差转换矩阵为

即:

式中:∆γza和∆βza为方位轴垂直度误差。A0系分别绕X轴和Y轴旋转角度 ∆γza和∆βza,转换得到B系。

图10 方位轴垂直度误差Fig.10 Azimuth axis perpendicularity error
4)对准误差
光电探测系统与升空平台之间的对准误差,主要指初始安装时两者之间的安装对准误差,如图11所示。当载体处于运动状态时,基座坐标系B 相对于升空平台坐标系S的误差转换矩阵为

即:

式中:为初始安装时的方位对准误差∆ψs;∆Φs、∆θs分别为滚动和俯仰方向的调平误差。

图11 安装对准误差Fig.11 Installation alignment error
3.3 光电吊舱目标定位误差综合模型(不包括升空平台导航系统模型)
当综合考虑各分项误差影响时,通过坐标转换流程,如图12所示,建立目标定位误差综合模型。目
xB[xb,yb,zb,1]T标在光电坐标系B的直角坐标=为

式中:χL=[0 0 0 1]T为目标在目标坐标系L的直角坐标;为误差转换矩阵。

图12 光电吊舱坐标系下目标定位误差的坐标转换流程图Fig.12 Coordinate transformation flow chart of target position error in photoelectric pod coordinate system
将目标定位过程中涉及到的各分项误差因素的来源、名称、符号、分布,以及典型的误差参数值统一列于表2中。

表2 光电转台坐标系下典型误差值统计Table2 Statistics of typical error values in coordinate system of photoelectric turntable
4 目标定位误差模型仿真及分析
光电测量系统坐标在转换的过程中,各个参数测量值、测量误差将会对结果产生影响。通过Monte Carlo 方法对目标定位基本参数模型进行全微分,得到光电探测系统目标定位误差传递系数模型:
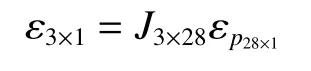
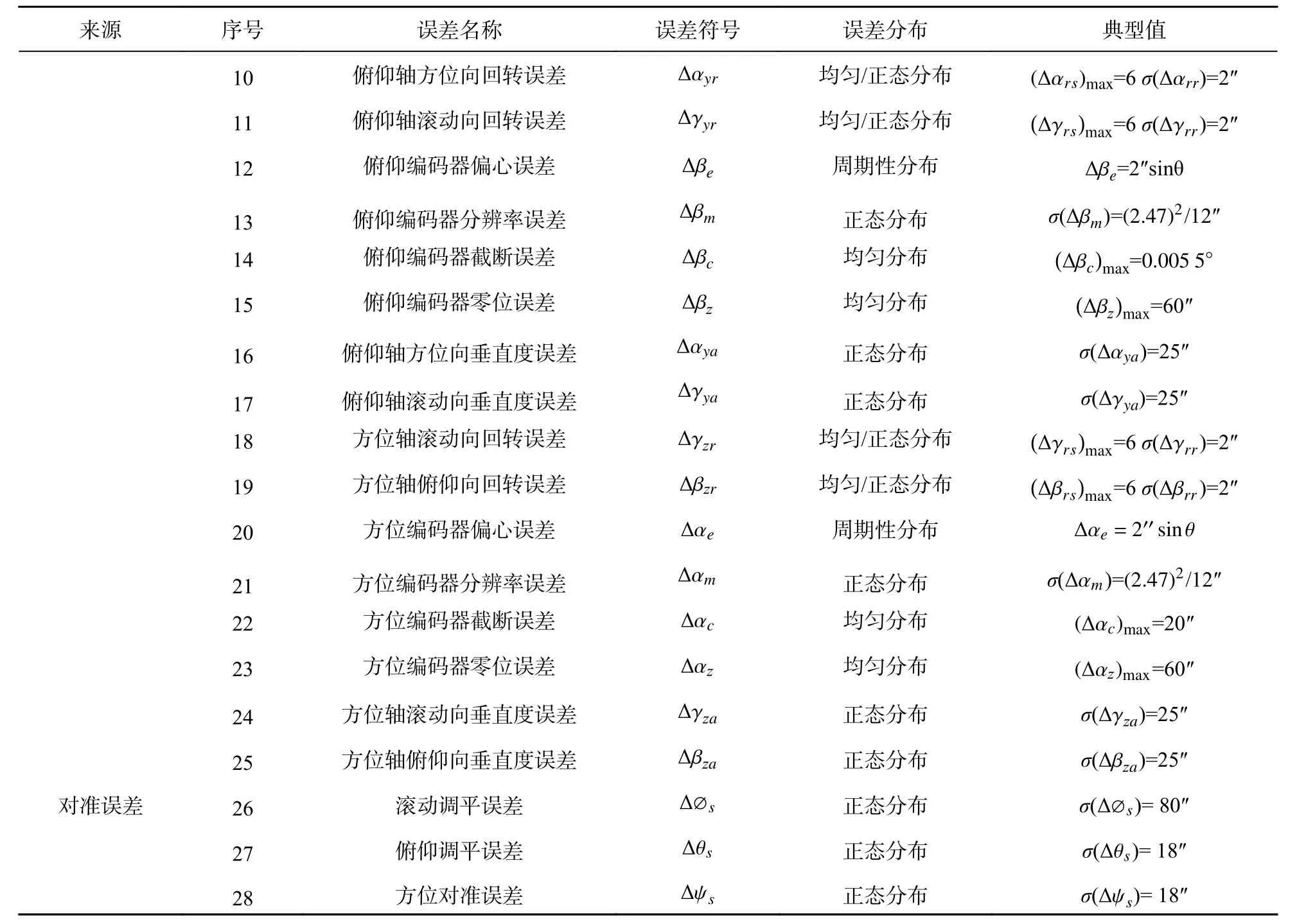
表2 (续)
式中:εp为各分项误差源;ε为系统目标定位误差;J为分项误差源与目标定位误差之间的映射关系矩阵[11]。假设各分项误差相互之间独立且各分项误差均值为零,即E(εp)=0,则E(ε)=0,目标定位误差的方差D(ε)=E(ε2)。由于各分项误差相互独立,则由E(εp(i)J(k,i)J(k,j)εp(j))=0可以得到D(ε)。

则目标定位误差的标准差与各分项误差标准差的关系可表示为
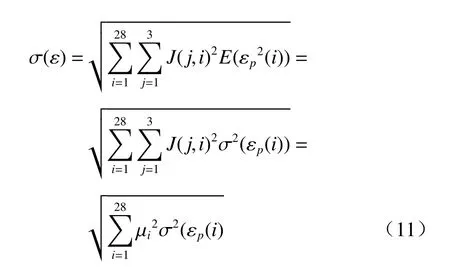

按照表2所示,根据(1)式~(8)式的误差坐标转化公式计算出各误差源产生的误差值,代入(9)式,可以得出光电吊舱相对于升空平台坐标系下的误差值,使用 Monte Carlo 方法求得统计意义下目标误差传递系数模型,代入灵敏度系数可得灵敏度评价指标,如图13所示(纵坐标为各误差因素导致的误差占空比)。

图13 光电探测系统的误差因素灵敏度比较Fig.13 Comparison of sensitivity of error factors in photoelectric detection system
通过对光电探测系统各项误差因素的灵敏度进行比较,我们可以得出以下判断:
1)影响目标定位精度的主要因素有方位和俯仰脱靶量误差(各占8%)、方位和俯仰编码器截断和零位误差(分别为16%和12%)、光电吊舱滚动调平误差(8%)和俯仰轴方位向垂直度误差(10%);
2)影响目标定位精度的次要因素为光电探测系统的光轴晃动误差和平行性误差(方位向和俯仰向各占6%)、光轴方位向和俯仰向垂直度误差(各占4%)和俯仰轴滚动向垂直度误差(6%)、方位轴俯仰向垂直度误差(4%);
3)其他误差因素,如激光测距误差、方位和俯仰轴系回转误差,位置传感器偏心和分辨率误差等以及机械形变等因素,对目标定位精度的影响相对较小。
5 结论
基于升空平台光电吊舱的目标定位误差分析,结合上节计算结果可以得到减小光电探测目标定位误差的有效方法是:
1)在升空平台上安装光电吊舱的过程中,尽量保证升空平台与光电吊舱之间的初始安装对准精度;
2)减小光电探测器的指向误差。在装配过程中,对角位置传感器的安装零位、机械框架的回转和垂直度、多光学探测器之间的光轴一致性进行机械调校。在电气调试过程中,对光电吊舱的指向误差进行硬件调校或软件修正。
猜你喜欢
科学大观园(2022年14期)2022-07-17
摄影之友(2020年12期)2020-12-23
铁道通信信号(2020年9期)2020-02-06
民用飞机设计与研究(2019年4期)2019-05-21
电子制作(2018年23期)2018-12-26
电脑爱好者(2018年17期)2018-11-05
航空模型(2016年10期)2017-05-09
西北工业大学学报(2015年3期)2015-12-14
中国舰船研究(2014年6期)2014-05-14
兵工学报(2011年10期)2011-02-22