基于有限元的交流伺服电机仿真分析
2020-04-09 08:16胡文广韩业鹏邸建忠谭宝来
计算机辅助工程 2020年1期
胡文广 韩业鹏 邸建忠 谭宝来
摘要:根据自动化设备实际需求,设计12槽10极交流伺服电机,分析该电机主要参数的选取。建立该电机的有限元模型和电路仿真模型,并进行电路 电磁场耦合分析。在空载状态下计算气隙磁通密度分布,分析空载反电势及其谐波含量和齿槽转矩;在额定负载状态下,分析电机额定电流下的电磁转矩和交直轴电感。结果表明:该电机的设计参数和电机性能满足技术指标要求,可为伺服电机的进一步优化提供参考。
关键词:
伺服电机; 气隙磁通密度; 反电势; 电感; 齿槽转矩; 有限元
中图分类号:TM302; TB115.1
文献标志码:B
Simulation analysis of AC servo motor
based on finite element method
HU Wenguang, HAN Yepeng, DI Jianzhong, TAN Baolai
(
INTESIM(Dalian) Co., Ltd., Dalian 116023, Liaoning, China)
Abstract:
According to the actual requirements of automation equipment, an AC servo motor with 12 slots and 10 poles is designed, and its key parameter selection is analyzed. The finite element model and circuit simulation model of the motor are established. The coupling between circuit and electromagnetic field is analyzed. Under no load condition, the air gap magnetic flux density distribution is calculated, and the no load back EMF and its harmonic content and the cogging torque are analyzed. Under the rated load condition, the electromagnetic torque and inductance of AC DC axis under rated current is studied. The results show that the design parameters and motor performance of the motor meet the technical requirements, that can provide reference for further optimization of the servo motor.
Key words:
servo motor; air gap magnetic flux density; back EMF; inductance; cogging torque; finite element
0 引 言
電机是95%以上电能的生产者和60%以上电能的消耗者,是工业、国防、航空航天和高端装备等众多领域赖以生存和发展的基础部件。[1]永磁同步电机以具有体积小、质量轻、效率高和功率密度/转矩密度高等优点而被广泛使用。[2]工业上使用的永磁同步伺服电机不仅要求在额定点稳定运行,还要求其具有良好的动态响应特性、宽阔的调速范围、平稳的运行转矩与转速、快速的应急反应,以及较好的NVH特性[3]。
随着智能制造概念的提出,电机的自动化升级也成为必然。作为自动化升级执行环节的重要组成部分,伺服电机也正朝着智能化方向发展。[4]伺服电机集成反馈、控制和运动等环节,可极大地提升设备运行效率。交流伺服电机设计方法也一直随着自动化设备指标的变化而不断发展变化。[5]采用新材料、新工艺的伺服电机也在不断涌现,
促进伺服电机的指标升级。[6]
本文基于Maxwell、利用有限元法建立伺服电机的电路 电磁场耦合仿真模型,对电机进行有限元分析,为伺服电机设计提供参考。
1 伺服电机理论设计
1.1 电机设计指标
伺服电机是自动化设备中的执行器,伺服电机在伺服驱动命令下完成转速、转矩和位置控制。[7]自动化设备的复杂性要求伺服电机应具有响应速度快、位置精度高、转矩控制稳等特点。此外,电机本体要具有齿槽转矩小、速度波动小、转动惯量小、效率高和散热能力强等特点。[8]因此,伺服电机的设计指标要求也更加严苛。
本文基于有限元法设计的伺服电机应用于自动化设备领域,设备要求的主要技术指标见表1。
1.2 反电势系数设计
伺服电机反电势系数决定电机在非弱磁状态下的最高转速。电机极限电压与驱动器直流母线电压满足关系
Ul=Uc2
(1)
式中:Ul为电机极限电压;Uc为驱动器直流母线电压。
伺服电机在极限转速工作时,驱动器输出的电压仍要满足电机输出转矩的要求,因此反电势系数需要满足关系
Kn=kUl
(2)
式中:K为反电动势系数;n为电机极限转速;k为预留系数。
在预留充分的设计裕量并满足最大转矩输出要求的前提下,本文设计的伺服电机反电势系数为0.169 V·s/rad。
1.3 主要尺寸设计
伺服电机的主要尺寸由所需的转矩确定。[9]当伺服电机所需的最大转矩为Tem时,转矩、电磁负荷与电机主要尺寸的关系 [10 11]为
Tem=2π4BLefD2iA×10-4
(3)
式中:B为气隙磁通密度;Lef为电机铁芯有效长度;Di为电机定子内径;A为电负荷。
当伺服电机电磁负荷确定后,电机的主要尺寸确定公式为
D2iLef=4Tem×1042πBA
(4)
当伺服电机动态响应指标要求体现在最大电磁转矩时,要求电机在时间t内由静止加速到转折速度ω,因此电机定子内径须满足
Di=82ptBAωρFe×10-3
(5)
式中:p为电机极对数;ρFe为转子铁芯材料密度。
由上式可以确定电机定子内径最大值与铁芯长度这2个主要尺寸。
2 电机模型建立
2.1 设计方案
根据自动化设备要求,设计的伺服电机方案见表2。采用10极12槽配合方案,磁铁选择抗退磁能力较强的永磁体N45SH。
2.2 仿真模型
基于Maxwell建立電机的全模型,考虑电路 电磁场耦合并搭建电机的激励电路模型。伺服电机有限元仿真模型见图1,
所搭建的电路仿真模型见图2。伺服电机采用Id=0的控制方式,激励为三相电源,通过调节电源的相位添加交轴电流,并添加电压表观测电机端部电压情况。
3 电机性能分析
对伺服电机空载和负载情况分别进行有限元仿真分析。空载仿真确定电机反电动势系数、齿槽转矩和空载磁通密度设计是否合理,负载仿真确定电机能否在额定电流下输出额定转矩、能否在控制器电压下输出额定电流。
3.1 电机空载仿真分析
在额定转速为3 000 r/min时进行电机空载仿真分析,伺服电机空载磁通密度分布见图3。空载情况下电机定子和转子磁通密度幅值均应处于硅钢材料饱和磁通密度以下,以保证电机良好的过载能力、较低的铁损和更高的效率。
自动化设备要求伺服电机具有高功率密度,因此在设计电机时采用更高的磁负荷,空载气隙磁通密度见图4,其横坐标为气隙空间机械角度,气隙磁通密度的峰值为1.05 T。
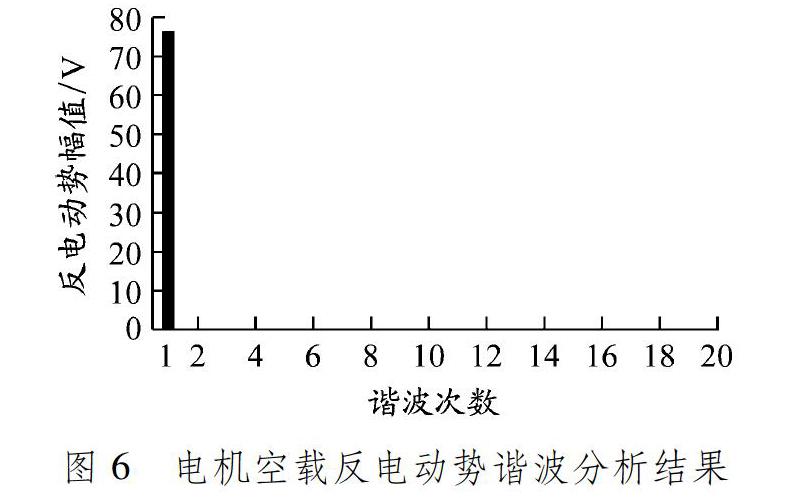
空载反电动势和傅里叶谐波分析结果分别见图4和5。从仿真结果看,电机空载反电动势的正弦度较好,傅里叶分析计算可以得到电机反电动势的总谐波畸变率为0.22%,低谐波畸变率能为电机NVH提供保证。计算得到的电机反电动势系数为0.170 V·s/rad,满足指标要求。
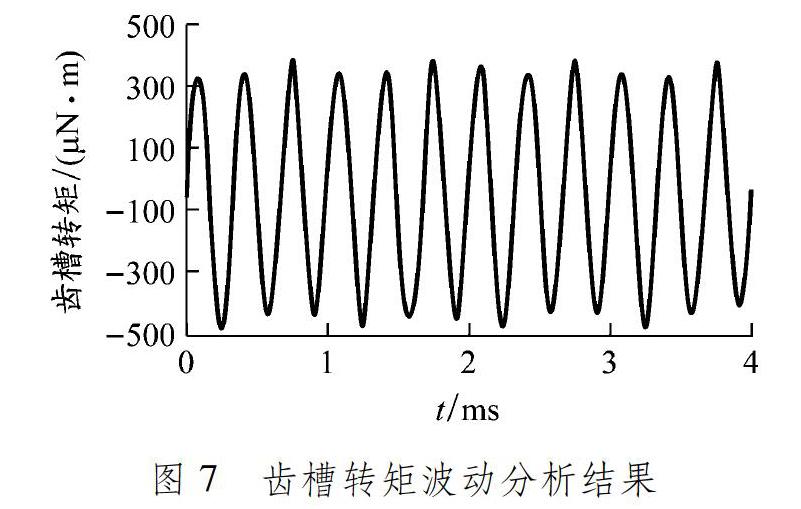
提高伺服电机的定位精度、减小电机转矩波动、提高电机NVH性能,都对伺服电机的齿槽转矩提出更高的要求。本设计从多个方面对电机齿槽转矩进行优化,齿槽转矩波动分析结果见图7。电机齿槽转矩峰峰值为0.85 mN·m,齿槽转矩峰峰值约为额定转矩的0.27%。
3.2 电机负载仿真分析
在电机转矩控制模式下,给定电机三相绕组额定电流为1.1 A,转矩输出计算结果见图8。此时电机转矩输出的平均值为320 mN·m,峰峰值为1.3mN·m,转矩波动小于设计指标5%,并且满足额定电流输出额定转矩的要求。
电机交直轴电感为控制系统提供电机的控制参数,该伺服电机转子采用表贴永磁体方案,因此交、直轴电感大小相等,其值为6.3 mH,仿真结果见图9。
通过电路 电磁场耦合仿真,测量电机在额定转 矩、额定转速下的电机端电压,见图10。所设计的电机驱动器输入电压为直流300 V,在额定点运行时电机端电压峰值约为100 V,满足设计要求。
4 结 论
建立电机的电路 电磁场耦合有限元仿真模型,分析电机运行情况,确定并校核电机设计的合理性。仿真结果表明:在空载下电机的磁通密度分布合理,齿槽转矩较低,反电动势设计合理;在负载下电机能够在给定电流下输出额定转矩,并且转矩波动小于5%。该伺服电机的设计参数和性能满足技术要求,可为电机设计提供参考,为进一步优化提供依据。
参考文献:
[1] 刘海涛, 陈学全, 云峰. 配电自动化终端设备一体化检测平台的构建与应用[J]. 内蒙古电力技术, 2014, 32(3): 33 39. DOI: 10.3969/j.issn.1008 6218.2014.03.003.
[2] 郭有权, 司纪凯, 刘群坡, 等. 机器人用外转子直驱永磁电机设计与性能分析[J]. 河南理工大学学报(自然科学版), 2019, 38(2): 91 96. DOI: 10.16186/j.cnki.1673 9787.2019.2.14.
[3] 李志明. 分数槽绕组永磁同步电机不平衡电磁力的分析和抑制[D]. 天津: 天津大学, 2012.
[4] 张岳, 曹文平, JOHN M. 电动车用内置式永磁电机(PMSM)设计[J]. 电工技术学报, 2015, 30(14): 108 115. DOI: 10.3969/j.issn.1000 6753.2015.14.015.
[5] 莫会成, 闵琳, 王健, 等. 现代高性能永磁交流伺服系统综述: 永磁电机篇[J]. 微电机, 2013, 46(9): 1 10. DOI: 10.3969/j.issn.1001 6848.2013.09.001.
[6] 王宏佳. 微小型高性能永磁交流伺服系统研究[D]. 哈尔滨: 哈尔滨工业大学, 2012.
[7] 骆再飞. 滑模变结构理论及其在交流伺服系统中的应用研究[D]. 杭州: 浙江大学, 2003.
[8] 莫会成, 闵琳. 现代高性能永磁交流伺服系统综述: 传感装置与技术篇[J]. 电工技术学报, 2015, 30(6): 10 21. DOI: 10.3969/j.issn.1000 6753.2015.06.002.
[9] 张建. PLC控制在电机测试平台中的应用设计[J]. 机电信息, 2013(12): 142 143. DOI: 10.19514/j.cnki.cn32 1628/tm.2013.12.091.
[10] 肖庆优. 工业机器人用永磁同步伺服电机设计与分析[D]. 广州: 广东工业大学, 2016.
[11] 唐任远. 现代永磁电机理论与设计[M]. 北京: 机械工业出版社, 2018: 267 268.
(编辑 武晓英)
猜你喜欢
股市动态分析(2021年16期)2021-08-16
科技信息(2021年7期)2021-02-28
发明与创新·中学生(2020年1期)2020-08-03
科技创新与应用(2020年15期)2020-05-21
信息技术时代·上旬刊(2019年4期)2019-09-10
发明与创新·小学生(2018年7期)2018-08-06
电机与控制学报(2018年9期)2018-05-14
小学生导刊(高年级)(2017年2期)2017-06-10
中学生数理化·高二版(2016年3期)2016-12-26
计算技术与自动化(2014年1期)2014-12-12