基于人工神经网络的机器人路径规划研究
2020-04-08 09:30陈麒瑞杜少华赵腾飞宋莹
电脑知识与技术 2020年3期
陈麒瑞 杜少华 赵腾飞 宋莹

摘要:随着科学技的发展,机器人技术得到了飞速的进步,如今机器人已经成为我们生产生活的一部分,从工业制造,卫星导航到无人驾驶技术等。而作为机器人技术重要的课题之一,路径规划算法也得到了学者们的重视,先后相继提出了各种各样的算法。
关键词:人工神经网络;路径规划;移动机器人
中图分类号:TP3 文献标识码:A
文章编号:1009-3044(2020)03-0227-03
1 概述
自古以来人们一直梦想制造一种像人一样的机器,来代替人类做工作,来完成各种危险而复杂的任务,使人类从繁重的体力劳动中解放出来。早在1920年,捷克斯洛伐克的作家卡雷尔·恰佩克就在他的小说中提出了机器人的概念,但直到1961年美国才真正制造出世界上第一台工业机器人。随着科技的不断发展,机器人技术也迎来了迅猛的进步,从20世纪70年代的传感技术、现代控制技术再到如今的人工智能,机器人的研究一直是一个热点话题。
在移动机器人导航技术应用过程中,其核心就是路径规划算法,路径规划要求机器人可以自己判定障碍物,主决定路径,避开障碍物。因此,研究出一种算法使得机器能够在最短的时间内,规划出一条路径长度最短、没有障碍物碰撞的路径,就成了学者们研究的重点课题。
本文基于人工神经网络提出一种路径规划算法,利用人工智能神经网络求出路径中障碍物的罚函数并由此得到路径能量函数,再利用退火算法对该函数求极小值,从而得到最优路径。
2 相关工作
路径规划经过几十年的发展已经涌现出了许多有效的求解方法,目前移动机器人路径规划算法主要有以下几类。
2.1 栅格法
栅格法是目前应用最为广泛的路径规划算法之一,它将机器人周边空间分解为相互连接但不重叠的空间单元,由这些单元构成一个连通图,依据障碍物占有情况,从图上搜索一条从起始单元格到终止单元格的最优路径。由栅格法规划出的自由栅格多少直接影响路径的长度,栅格越多则路径越长。然而由于栅格法能将空间中的关系抽象为一个个栅格,大大简化了计算,因此栅格法也是目前最主流的路径规划算法之一。
2.2 人工势场法
人工势场法来源于物理学,它将机器所处环境定义为一个势场,所有障碍物描述为一个对机器人存在斥力的物体,而机器人目的地是一个存在引力的点。引力和斥力的合力为机器人的加速力,来控制机器人的运动方向和运动位置。该算法简单,易于底层控制,但存在局部最优解的问题,容易产生死锁现象。在使用人工势场法时可能使机器人在到达目的地之前就停留在局部最优点。
2.3 蚁群算法
蚁群算法是一种模拟蚂蚁觅食行为的智能算法,研究发现,蚂蚁在觅食的过程中会在经过的路径上留下一种物质,称为信息素,其他的蚂蚁能够感知信息素是否存在以及强度的高低,并会倾向于爬向信息素浓度高的地方。这种方法主要用于解决最优化问题,路径长度越短,经过的蚂蚁越多,则信息强度也就越高,这是一个正向反馈的过程,从而逼近直至找到全局最优解。
3 相关算法
3.1 BP人工神经网络
BP神经网络,又称为反向传播网络、多层前馈网络,其大致结构如图1所示:
由图可知,该网络一般由三层构成:输入层、隐藏层、输出层。同一层神经元之间没有交互,隐藏层可以有多个。由实验可知,该网络可以逼近任意非线性函数。它是一种利用反向传播算法进行训练的多层前馈网络,它的核心是利用梯度下降法,使输出值和期望值的均方误差最小。
3.2 退火算法
退火算法来源于物体退火过程。所谓的退火就是指物体降温的过程,在降温的过程中物体的内能会降低,当温度降低至某一最低值时物体的温度和内能会趋于稳定。在最优化算法中,该算法从起始点开始向周围各个遍历,如果周围某个点的值比当前点小,则选择更优点。如果该点比当前点更大,则依据概率接受该点。
3.2.1 退火法模拟
退火法其实是一种贪心算法的变形,即每次选择时都会选择当前最优点作为下一个扩展点,不同的是退火算法在获得一个比当前解更差的解时并不会选择抛弃,而是会以一个概率来使该解成为当前解进行下一次遍历,因此退火算法可以避免陷入局部最优解,从而达到全局最优解。
根据蒙特卡洛定理,当高温物体降温的过程中,温度稳定的概率为,其中E为温度为T时物体的能量,为固体降温前后的温度改变量,k为Boltzmann常数。对于上述定理可转化为数学公式:
在解决优化问题时可以对上述公式进行变更,得到的算法流程為:
(1)由初始解i和控制参数t开始。
(2)获得下一个解i+l。
(3)对解i+l和i进行比较,如果解i+l优于解i,则接受解i+l;否则便以一个概率来接受解i+l。
(4)每次迭代衰减t值。
(5)达到停止条件s时停止算法。
基于此我们对该算法进行模拟的到如下图像:
图像中绿色线条为模拟函数,蓝色点为起始点,红色点为算迭代得到的解,从图像可以看出该解为全局最优解。
3.3 基于人工神经网络的路径规划算法
本课题主要利用BP神经网络并结合退火法来进行路径规划,在路径规划问题中,难点在于如何将所求问题转化为一个数学问题。本文基于环境已知的条件下,将机器人通过某一路径所需要的代价定义为能量函数,其中能量函数包括两个部分,一个部分表示路径长度,另一个部分定义为碰撞惩罚,表示通过该路径需要经过的障碍物,以此来表示机器人通过该路径所需要的能量损耗。并通过退火算法来对该函数求极小值,由于退火算法概率选取差于当前解的次优解,所以在迭代过程中可以避免陷入局部最小值,达到局部最优的结果
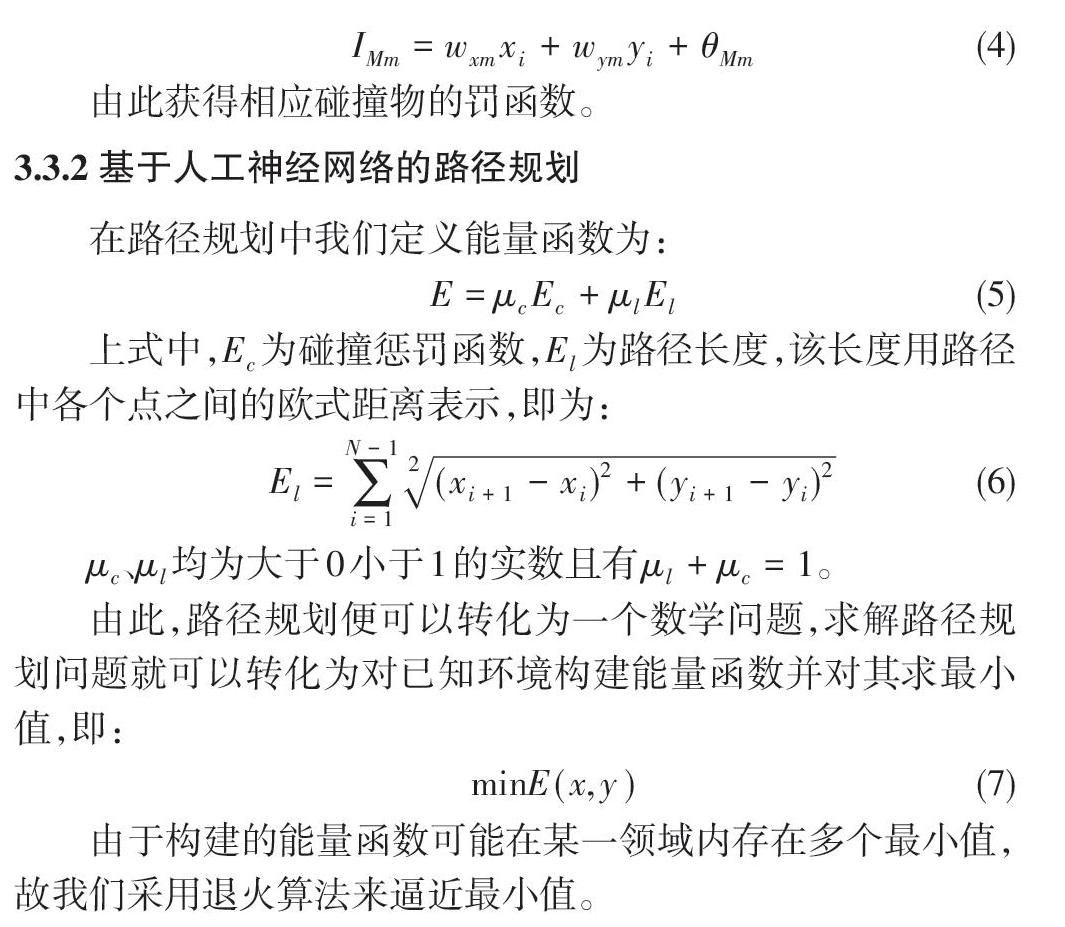
3.3.1 人工神经网络计算路径罚函数
在环境已知的条件下,可以构建笛卡尔坐标系,将问题中对障碍物和路径的表述转化为数学表示。其中路径为各个相邻点之间的欧式距离的和,而用不等式组来表示相应的障碍物。我们使用三层BP神经网络,第一层为输入层,输入层包含两个神经元,表示坐标的x、v输入;第二层为隐藏层,隐藏层中所包含的神经元数量为表述相应不等式的个数,隐藏层和输入层之间连接的权数为不等式坐标的系数,使用的激活函数为sigmoid函数;输出层输出相应障碍物的罚函数,输出层结点的阈值取不等式结点个数减去0.5的负数。
我们建立下图所示坐标系,坐标系中黑色块表示为障碍物:
由于构建的能量函数可能在某一领域内存在多个最小值,故我们采用退火算法来逼近最小值。
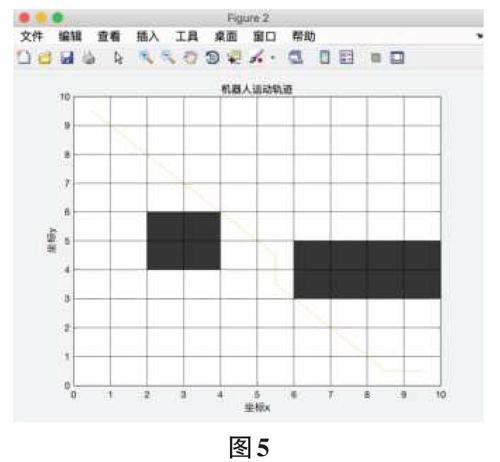
3.4 模拟实验
基于matlab我们进行了相关模拟实验,对路径可视化后到如下结果:
4 总结
本文基于人工神经网络,讨论了一种机器人路径规划算法,利用人工神经网络计算路径中障碍物的惩罚值,利用结点的欧式距离的和表示路径长度,并將这两部分的和表示为路径的能量函数,利用退火算法求出能量函数的最小值,其结点构成的路径便是全局最优路径。
参考文献:
[1]耿焕同,陈正鹏,陈哲,等,基于平衡搜索策略的多目标粒子群优化算法[J].模式识别与人工智能,2017,30(3):224-234.
[2]刘祖兵,袁亮,蒋伟.基于模糊逻辑的移动机器人避障研究[J].机械设计与制造,2017(3):101-104.
[3]刘晓磊,蒋林,金祖飞,等.非结构化环境中基于栅格法环境建模的移动机器人路径规划[J]机床与液压,2016,44(17):1-7.
[4]谢红侠,马晓伟,陈晓晓,等.基于多种群的改进粒子群算法多模态优化[J].计算机应用,2016,36(9):2516-2520.
[5]宫孟孟.基于神经网络的移动机器人路径规划方法研究[D].哈尔滨:哈尔滨工业大学,2017.
[6]黄磊,苏义鑫.基于神经网络的移动机器人路径规划方法研究[J]控制理论与控制工程,2008(5).
[7]崔建军,魏娟.基于遗传算法的移动机器人路径规划研究[J]测试计量技术及仪器,2008(9).
[8]刘传颂,杨静宇.基于势场法和遗传算法的机器人路径规划技术研究[J].计算机应用技术,2012(3).
[9]刘亮,曾明如.基于势蚁群算法的机器人路径规划研究[J].控制理论与控制工程,2013(5).
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
空间科学学报(2020年4期)2020-04-22
电子制作(2019年10期)2019-06-17
制造技术与机床(2017年3期)2017-06-23
建筑材料学报(2014年4期)2014-03-11
中国海洋大学学报(自然科学版)(2014年8期)2014-02-28
中国海洋大学学报(自然科学版)(2014年7期)2014-02-28
无损检测(2010年8期)2010-12-04