
山药机械化收获技术及其发展
2020-04-07 03:52龙思放刘月广马斯
农机使用与维修 2020年3期
龙思放 刘月广 马斯

摘 要:中国山药种植具有范围广、地域地理复杂的特点,机械化收获是山药机械化生产中关键的技术环节。山药收获机械化技术包括开沟、振动、提升、输送等几个关键性技术。分析了中国山药收获机械化技术的发展现状、特点及制约因素,并对山药收获机械化发展方向进行了展望。
关键词:山药;机械化收获;现状
中图分类号:S225 文献标识码:A开放科学(资源服务)标识码
doi:10.14031/j.cnki.njwx.2020.03.003Open Science Identity(OSID)
0 引言
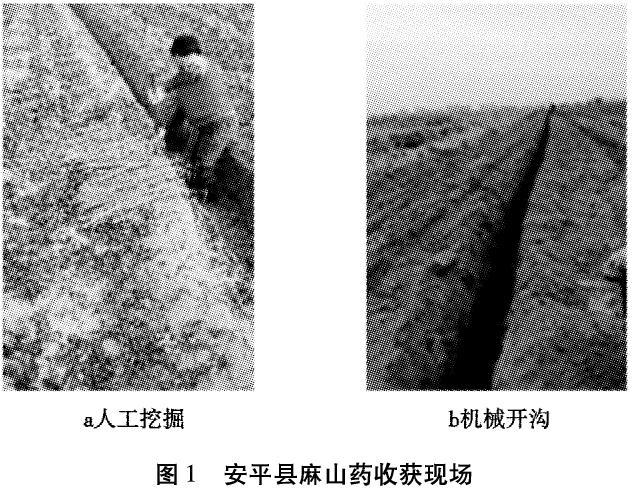
山药属草本植物,其块根富含蛋白质和淀粉,是药食同源的名贵食材。我国有悠久的山药栽培历史,其主产地位于河南,以铁棍山药和怀山药为主,产量占全国80%左右[1-2]。另外,河北、山西、广西、山东、浙江、湖北等地也有栽培。在我国,山药收获还处于半机械化初级状态,山药的出土、清选、输送和存储还没有完全实现自动化。大部分收获机械只停留在开沟、松土阶段,极少数配备有提升装置,但效果差,对山药损伤较为严重[3]。目前,小面积麻山药种植区多以人工挖掘为主,较大面积种植区多采用挖沟机先在麻山药两行间开出一条深沟,然后人工再用铁锹挖掘,如图1所示。以上收获方式机械化程度低,费时费力,易对麻山药造成损伤,影响品相。
1 国内外研究发展与现状
1.1 国外山药收获机发展现状
山药主产区位于东南亚,20世纪60年代,日本开始研究山药、胡萝卜、青芋等根茎类收获机械,并在20世纪90年代末成功研制出小型根茎类收获装备。21世纪初,日本研发了较为成熟的山药机械,随后不断改进优化[4-5],如图2所示,实现了种植——培育——收获的全程机械化。日本所种植山药较中国山药品种扎根浅且形态粗,两者之间存在一定差异,但山药产业模式值得借鉴与学习。
1.2 国内山药收获机的发展及现状
由于山药本身脆性大、易折断且扎根较深,若直接拔取或在山药下方振动松土是行不通的,因此我国山药收获机的设计多重于开沟机研究[6]。国内对开沟机的研究起步较晚,20世纪50年代开始出现犁铧式开沟机,其结构简单、工作可靠,但机体笨重、牵引阻力大[7];20世纪70年代出现圆盘式开沟机,其牵引阻力小、工作效率高,但能耗大、开沟深度较浅[8];20世纪90年代螺旋式、链式开沟机开始出现,其开沟深度能够满足山药的机械化收获,与此同时国内拖拉机马力得到大幅度提升,能够与开沟机相配套,山药种植与收获机械开始出现[9-10]。
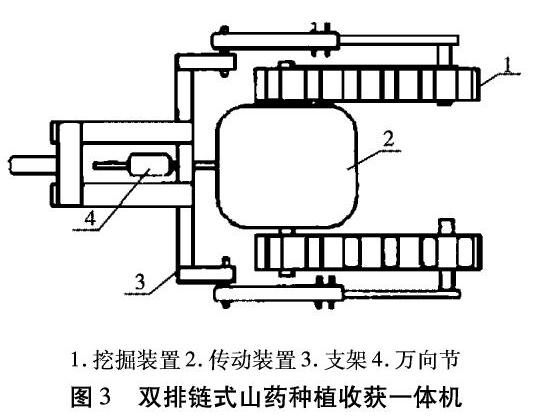
1998年北京顺义区农机具研究所研发出第一台双排链式山药种植收获机,如图3所示[11]。其结构包括机架、挖掘装置和传动装置。在收获过程中,利用两排链条在山药土垄一侧开沟挖掘,随后由人工挖掘、捡拾,减轻了生产劳动强度。
2011年王茂成设计了螺旋式山药种植收获一体机[12]。它主要包括机架、动力装置、振动装置及开沟装置,振动装置装配在开沟装置后端,振动装置的工作部件为振动箱。工作时,开沟装置将山药土垄两侧的土壤掘松之后由振动装置松土,使山药向上顶出,如图4所示。该机具较上一代添加了振动装置,有利于土壤与山药分离,但旋沟犁的位置固定就意味着此机具适用性降低,同时机具功耗、前进阻力大,入土过程十分困难。
随后山东森海公司与山东农业大学联合研制了佐佐木牌4USY-1山药收获机,该机具采用单行收获的方式,在山药两侧开沟,振动装置在山药下方振动,使山药随土壤向上提升,此机具适合我国多种种植模式使用,如图5所示。田间作业效果表明机械挖掘深度为90~105 cm,起土到位,山药基本无破损,效果好;试验田单产约为1474 kg·亩-1,田间破损山药质量为514 kg,破损率为35%[13]。
2014年河北工业大学等模仿考古挖掘过程,将山药根茎两侧土壤去除,取其中间部位,加之振动松土,最终研发了一款集挖掘开沟、松土、输送为一体的山药收获机,如图6所示,但只对该装备进行了有限元仿真与校核,并未见到实际的田间收获效果[14]。此机型与佐佐木山药机较为相似,但在传动结构上采用前置液压机构来调节挖掘深度,后置输送机构通过液压油缸与机架相连,通过调节液压系统来改变输送机构的倾斜角度,从而有利于适应不同深度的山药挖掘与山药输送工作。
2016年蠡县第一播种机械厂研发了一款麻山药收获机,如图7所示。与前文提到的几款后悬挂式山药收获机不同的是,该机具集挖沟收获、土壤回填、平整土地等功能于一体,并设有3条开沟链,可同时开3条沟进行双行收获,振动装置位于两行山药下方,振动松土。折返收获时将之前倒出到地面的土壤回填至已开沟中,有利于后期的平整地工作。田间实验结果表明收获机破损率在5%以内[15],满足农艺要求。
2018年初,山东菏泽市陈集镇农民栗广臣发明了一款振动式单行山药收获机,在山药两侧开沟的同时附加机械振动,使土壤下降,山药上升,最后由人工拔取,如图8所示。该机具也是集山药收获与土壤回填的一体化机械,通过田间试验表明效率约为人工的30倍,且损失率较低。
2 存在问题与研究方向
2.1 存在问题
目前国外根茎类作物的机械化收获技术比较成熟,国内山药产业的实际情况和机械化收获的研究还存在诸多问题,制约着山药产业在我国的发展。
(1)种植农艺多样化。
山药机械化收获对农艺要求高,加之我国山药在种植、田间管理等方面机械化程度低,且各地的种植方式不同、农艺不规范,对山药收获机的适应性能力提出很高要求。此外,大部分山藥种植区域不集中、成片状,缺乏相对成熟的合作机制,导致山药不能规模化生产,一些大型种植机械、收获机械价格昂贵,个体户很难承担其费用。
(2)收获阻力大,山药损伤率高。
山药收获作业条件差,挖掘深度较深。泥土、石头等杂物会对机具造成很大的前进阻力和刚性冲击,减少机具寿命。评价收获机性能的重要参数是农作物的损伤率,山药在收获过程产生损伤是正常的,但应完善相应的国家或行业标准,将山药的损伤降低至可接受范围内。
(3)传动结构复杂。
山药收获机械包括开沟、振动、松土等几个关键部分,执行装置形式多样,结构复杂,造成机械整体过于庞大,加之作业深度较大,极易造成壅土、黏附等问题,阻碍收获机进行持续作业。
2.2 未来研究方向
(1)山药本征特性研究。
山药物理特性的研究是山药收获机械研发的重要环节,通过研究山药的几何形状、根茎叶的物理特性(抗拉强度、剪切力、拉拔力等)的研究,可以为山药收获机械的研发、关键部件参数的设定提供理论依据。
(2)农艺农机相结合。优化作物品种,使其有利于机械化种植、管理与收获,同时改进种植模式,规范种植间距,通过合理利用催熟技术,使山药一次性机械收获成为可能。通过相关学科专家的定期交流,协同研究,制定符合机械化收获的栽培模式。
(3)机械结构的设计与优化。
山药收获机械体积大,价格高,由于农民的经济承受能力低,需尽可能降低制造成本。在保证机械性能的前提下,设计结构简单、紧凑、通用性好、智能化程度高的山药收获装备,将成为未来市场的大趋势。同时,现代机械设计理论和方法,以及CAD/CAE 软件,对进行机械运动学、动力学仿真提供技术支持,为优化机械结构提供有力保障。
(4)智能化的收获系统。
随着微电子技术的迅速发展,将机械系统和液压系统以及电气系统充分结合起来,可使收获机更加轻量化、智能化、便捷化。针对山药收获机,可以加装导航装置,既保证了山药收获机的直线行驶,又实现了精准作业。
3 结论
随着山药种植面积的不断增加,迫切需要一台能够实现开沟、振动、松土、输送、筛分的联合收获机械。一方面要统一栽培模式,实现规模化、标准化种植;另一方面要加强对适合于山药收获的小型大马力拖拉机的研发,实现山药智能化收获。同时,要结合山药种植农艺,加大山药收获关键性技术的研发力度,尽快实现山药产业的机械全程化与智能化。
参考文献:
[1]韦本辉.中国淮山药栽培[M].北京:中国农业出版社,2013.
[2]汤洁,戴兴临,涂玉琴,等.淮山药新品种及栽培新技术研究[J].江西农业学报,2011,23(9):57~59.
[3]于万胜.山药收获机的设计与研究[D].天津:河北工业大学,2014.
[4]刘建军,宋建农,陆建伟,等.大蒜收获工艺的分析与探讨[J].农机化研究,2008(1):24-25.
[5]松田清明,宮本啓二,佐藤禎稔.ナガイモ掘取り機の収穫作業体系と作業性能および負担面積[J]. 農作業研究(Japanese Journal of Farm Work Research),2001,36 (3): 163~170.
[6]王俊发,马旭,马浏轩,等.根茎类中药材收获装备现状及其收获工艺[J].农机化研究, 2009(12):12-15.
[7]Alvarez M,Grima, P N W,Verhoef. Forecasting rock trencher performance using fuzzy logic[J]. International Journal of Rock Mechanics and Mining Sciences,1999(36): 413-432.
[8]Vilde Arvids, Rucins Adolfs. Development of agricultural mechanics[C]. Engineering for Rural Development,11th International Scientific Conference,2012(5):67-73.
[9]李自华,柯保康.农业机械学[M].北京:中国农业出版社,1991(3):150-175.
[10]朱新民.1KLZ-27型螺旋开沟机[J].农牧与食品机械,1991(4):38-38.
[11]高士文,刘文华,刘建福.山药种植收获机:中国,98252126.X[P].1999-10-16.
[12]王茂成.山药收获种植两用机:中国,102144450.A[P].2011-08-10.
[13]刁怀庆.4USY-1型山药收获机田间试验研究[J].农业技术与装备,2014(12):30~31,33.
[14]于万胜.山药收获机的设计与研究[D].天津:河北工业大學,2014.
[15]宋帅帅,杨欣,冯晓静,等.自走式麻山药收获机的研究[J].农机化研究,2018(2):80-84.
猜你喜欢
基层中医药(2020年9期)2020-11-27
文苑(2020年6期)2020-06-22
农家科技中旬版(2020年1期)2020-03-12
创新作文(小学版)(2019年22期)2019-12-07
现代园艺(2017年21期)2018-01-03
成才之路(2016年26期)2016-10-08
成才之路(2016年25期)2016-10-08
成才之路(2016年25期)2016-10-08
小学教学参考(语文)(2016年9期)2016-09-30
科技视界(2016年20期)2016-09-29
