一种结合图像复原技术的自适应光学系统控制方法*
2020-04-03 08:43:58雍佳伟田雨许克峰饶长辉
物理学报 2020年6期
雍佳伟 田雨 许克峰 饶长辉†
1) (中国科学院自适应光学重点实验室, 成都610209)
2) (中国科学院光电技术研究所, 成都610209)
3) (中国科学院软件研究所, 北京100190)
4) (中国科学院大学, 北京100049)
(2019 年 10 月 9日收到; 2019 年 11 月 26日收到修改稿)
在天文高分辨成像领域, 自适应光学校正和事后图像复原都必不可少, 但传统的自适应光学系统控制方法以提升光学成像质量为目的, 并未考虑图像复原环节, 因此, 研究一种结合两者以获得高质量复原图像为目标的控制方法具有重要意义. 本文对传统自适应光学技术结合事后图像解卷积的方法进行了分析, 阐述了其存在的缺陷. 首次提出了将自适应光学技术和图像复原技术相结合进行系统分析的思想, 并提出了变形镜校正度(变形镜控制电压相对于传统方法控制电压的缩放比例)的概念, 通过改变校正度可实现变形镜校正残差和波前传感器探测误差的调整, 同时证明了复原图像质量在校正度下降的方向存在一个最优值, 用最优校正度来修正变形镜控制电压, 就得到了一种新的控制方法. 针对点源目标成像, 仿真表明该方法相比于传统方法, 能够得到质量更好的复原图像.
1 引言
为解决天文观测中大气湍流的扰动问题,Babcock[1]于1953年首先提出自适应光学(AO)的基本概念, AO系统通过相位共轭原理可以实时补偿大气湍流的影响, 使观测结果近似于衍射极限. 1972年, Itek公司研制成功世界上首套大气补偿系统RTAC[2]. 欧洲南方天文台从80年代开始的COME-ON项目先后在1.5 m和3.6 m望远镜上实现了高分辨力成像[3,4]. 进入90年代, 世界范围内建成了一批大口径地基天文望远镜, 如Keck[5], LBT[6], VLT[7], Gemini[8]等. 同时, 国内AO系统的发展也很迅速, 2004年实现了云南天文台1.2 m望远镜61单元变形镜自适应光学校正[9],2009年丽江1.8 m 望远镜上的127单元AO系统实现首光[10], 2016年1 m新真空太阳望远镜(NVST)建立了37单元太阳AO系统和 151单元高阶太阳AO系统[11]. AO系统在望远镜上的广泛装备使得AO技术获得了巨大的发展, 波前校正器和波前传感器的单元数都在不断增加.
然而, 由于硬件条件的限制, AO系统一般不能实现对波前相位差的完全校正. 这些限制包括变形镜没有足够的自由度很好地恢复复杂波前相位差[12], 以及由于CCD噪声等因素, 波前传感器无法准确地检测波前信息; 同时, 提升AO系统校正能力会带来系统复杂度和成本的指数上升. 为了降低成本、简化系统, 便产生了事后图像处理方法,1990年Primot等[13]率先提出了将解卷积技术应用在AO系统上, 国内的中国科学院自适应光学重点实验室在2012年也使用相位差方法对AO系统输出图像进行了复原[14]. 这种方法在一定程度上综合了AO技术和图像复原技术的优点, 是目前主流的方法.
但是长期以来, AO技术和图像复原技术由于分属不同的研究领域而处于独自发展的状态, 即使是上文提到的综合了AO技术和图像复原技术的方法也仅仅是这两种技术的简单拼接, 两者之间并无交叉, 这样的控制方法会导致AO校正只是产生了一个尽量好的中间结果—光学成像, 但是对最终结果—复原图像来讲是失控的, 因此, 研究一种真正结合两者并以提升最终复原图像质量为目的的控制方法具有重要意义. 本文以传统AO校正匹配事后解卷积复原算法的方法作为切入点, 分析了目前方法存在的缺陷, 并首次提出了一种结合这两种技术的控制方法, 使用该方法, 望远镜成像系统产生的输出图像可以让复原算法发挥最大的潜力, 最终得到高质量的复原图像.
2 传统AO技术结合事后图像解卷积的方法及其存在的缺陷
2.1 基于自适应光学的望远镜成像模型

其中l是系统工作时的波长,是系统衍射受限时的孔径函数表示傅里叶变换. 影响的主要因素为
自适应光学成像系统在近轴区域近似为一个线性空不变系统, 对于输入的理想目标图像系统的光学成像的空域表达式为


2.2 基于波前探测和维纳解卷积的事后图像复原技术

理想情况下,g取噪声和原图像功率谱的比值.本文对点源目标成像进行研究, 用斯特列尔比(Strehl ratio, SR)作为评价指标, 可以根据复原图像直接计算:

2.3 系统分析
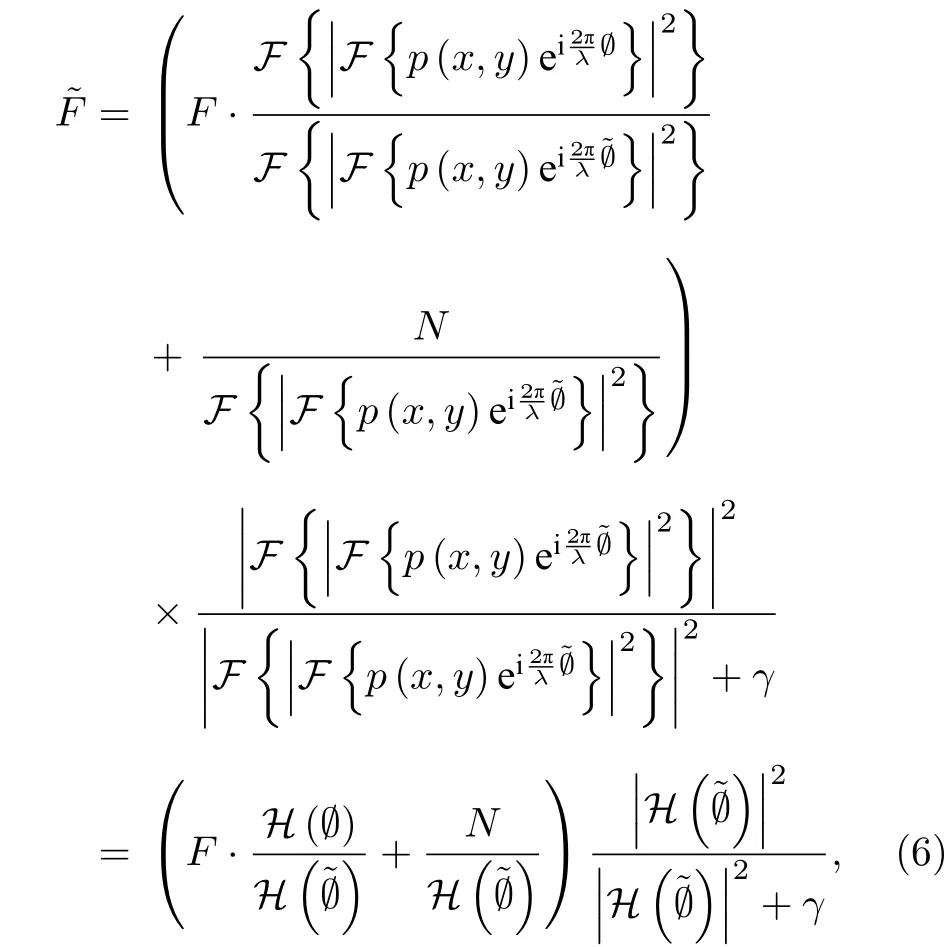
本文提出将成像过程和事后图像复原过程看作一个整体进行系统分析, 根据上文结论, 最终的复原图像可用如下式子表达:
2.3.1 变形镜的校正残差分析

2.3.2 波前传感器的探测误差分析
哈特曼传感器是在AO系统中应用最广的波前传感器, 根据其斜率测量结果可用Zernike模式波前复原算法进行波前重构. 影响重构精度的主要有子孔径斜率测量传播误差、建模误差, 后者为主要部分[17], 本文只考虑后者. 建模误差包括子孔径空间频率、复原阶数的选择, 哈特曼传感器的子孔径排布一旦确定, 它的空间分辨率就确定了, 任何频率高于子孔径分布空间频率上限的波前信息都将被平滑掉. 哈特曼传感器对拟合残差的重构可用如下模型表达:

其中Zk(x,y)表示第k阶 Zernike 多项式;ak,bk为对应项系数;e为重构误差;M是拟合残差实际的最高阶数,N是探测器复原的最高阶数,N≤M.现有文献对波前复原质量的评价普遍采用波前重构精度Pr[18],Pr定义为

其值越小, 波前重构精度越高.
2.3.3 现有方法存在的缺陷
根据(7)式, AO系统在对校正范围内的像差进行校正后产生高空间频率残差这部分残差超过探测器复原的最高阶数因而不能被AO 系统校正, 根据 (8)式, 高阶残差量越大,e就越大, 波前重构精度就越差. 残量滤波器K=此时等价于一个降质滤波器, 根据(6)式, 这将导致复原图像频谱的失真.
3 结合图像复原的自适应光学系统控制方法
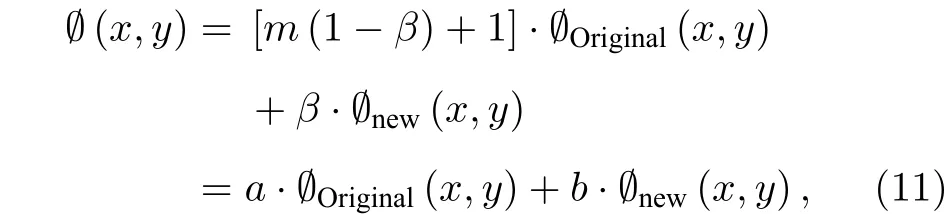
根据上节分析, DM校正残差中的高频成分是导致复原图像失真的关键, 减少这部分像差可以提升波前传感器复原精度, 从而有利于图像复原. 一种简单可行的解决办法是用一个乘积系数b(0 ≤b≤ 1)对DM的闭环控制电压进行修正, 该系数定义为变形镜校正度. 根据影响函数的线性叠加原则, 经修正后, DM 拟合面更新为校正残差更新为

但另一方面,b减小过程中a的持续增大会导致波前残差总量的增大, 残差越大, 对应的OTF衰减越强, 在中高频段尤甚, 甚至可以出现0值而产生频率截止. 这对解卷积非常不利, 因为残量滤波器K在OTF值接近0的区域对微扰非常敏感,将(8)代入K有

其中DH表示高频成分e带来的微扰, 若像差过大导 致在 某 些 频 率 出 现K将 由DH主导并有最终导致复原图像失真.
综上, 在校正度b值的选择上存在一个权衡,校正度较大时, 残差量较小, 但波前重构精度低;当校正度变小, 波前重构精度提高, 但残差量增大,所以存在一个最优校正度, 最优校正度由反馈的复原图像像质指标决定, 用最优校正度对AO系统的控制器进行修正, 会得到更高质量的复原图像. 整个原理如图1所示.

图1 控制原理框图Fig. 1. Control principal diagram.
4 仿真与分析
为验证上述结论, 建立了一个61单元变形镜模型, 驱动器布局和光瞳如图2所示, 其高斯指数为2.05, 交连值为10%.
哈特曼传感器模型采用(8)式, 考虑到实际中和以上变形镜的匹配[20], 令N= 20.
波前畸变一般采用Zernike多项式来描述, 变形镜对Zernike多项式的拟合残差直接反映了变形镜对波前畸变的校正残差. 本文选择径向频率在4阶以内常见的几种Zernike像差(除平移像差和倾斜像差)作为波前畸变y(x,y), 这些像差为离焦Z4、像散Z5、彗差Z8、高阶彗差Z9、球差Z12, 包含了光学系统静态像差和大气湍流像差中主要部分的类型, 具有代表性, 同时还随机生成一组系数,构成基于该五种像差的组合像差C1, 各像差均方差(RMS)均设为1个波长. 原始图像选用理想点源.
用以上仿真系统对离焦像差进行校正, 校正前后的像差均用70阶Zernike多项式分解, 代表实际存在的残差成分, 如图3所示. 可见20阶以内仅残余微量残差, 但20阶以外超出AO校正范围,新产生了大量高阶残差, 即这是残差的主要部分, 仿真结果和上文的结论一致.
波前重构精度和校正残差RMS随校正度b的变化趋势如图4所示, 结果也与前文结论一致.对其他类型像差进行这两项仿真均有类似结果.
对选择的6种像差, 图5给出了在均值为0方差(var)为(10–4)2的高斯白噪声下, 校正度b从1变化到0时对应的各复原图像SR曲线.

图2 61单元变形镜驱动器布局Fig. 2. Actuator arrangement of 61-element DM.

图3 61单元变形镜对离焦像差校正结果(a)校正前系数; (b)校正后系数Fig. 3. Correction results of defocusing aberration by 61-element DM: (a) Coefficient before correction; (b) coefficient after correction.
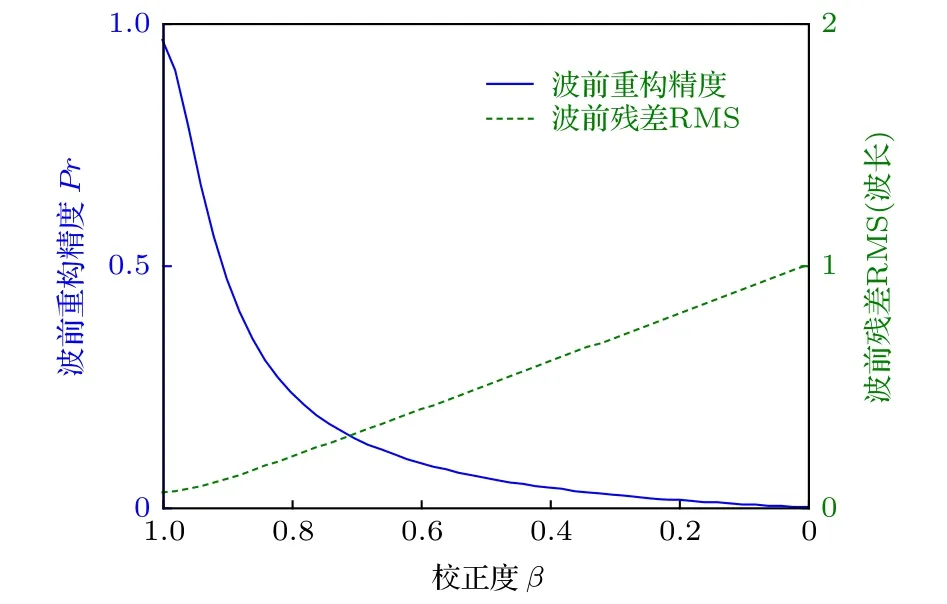
图4 波前重构精度和波前残差均方差随校正度b的变化趋势Fig. 4. Curves of wave-front reconstruction accuracy and RMS of wave-front residual error changing with b.

图5 61单元变形镜不同校正度下复原图像的SRFig. 5. SR of restored images with different b by 61-element DM.
显然, 各SR的最大值均不在传统AO控制方法所对应的b= 1处. 本文重点和传统方法作比较, 为了显示更加清晰, 以在b= 1处的数据为标准, 将其他校正度下的数据与标准数据的比值定义为相对SR, 该值比越大效果越好, 反之效果越差.在三种噪声强度下重复仿真, 分别代表了轻度、中度、重度噪声污染, 结果如图6所示.

图6 61单元变形镜不同噪声强度下复原图像的相对SR(a) var = (10–4)2; (b) var = (5 × 10–4)2; (c) var = (10–3)2Fig. 6. Relative SR of restored images with different noise by 61-element DM: (a) var = (10–4)2; (b) var = (5 × 10–4)2;(c) var = (10–3)2.

图7 37 单元变形镜不同噪声强度下复原图像的相对 SR (a) var = (10–4)2; (b) var = (5 × 10–4)2; (c) var = (10–3)2Fig. 7. Relative SR of restored images with different noise by 37-element DM: (a) var = (10–4)2; (b) var = (5 × 10–4)2; (c) var =(10–3)2.
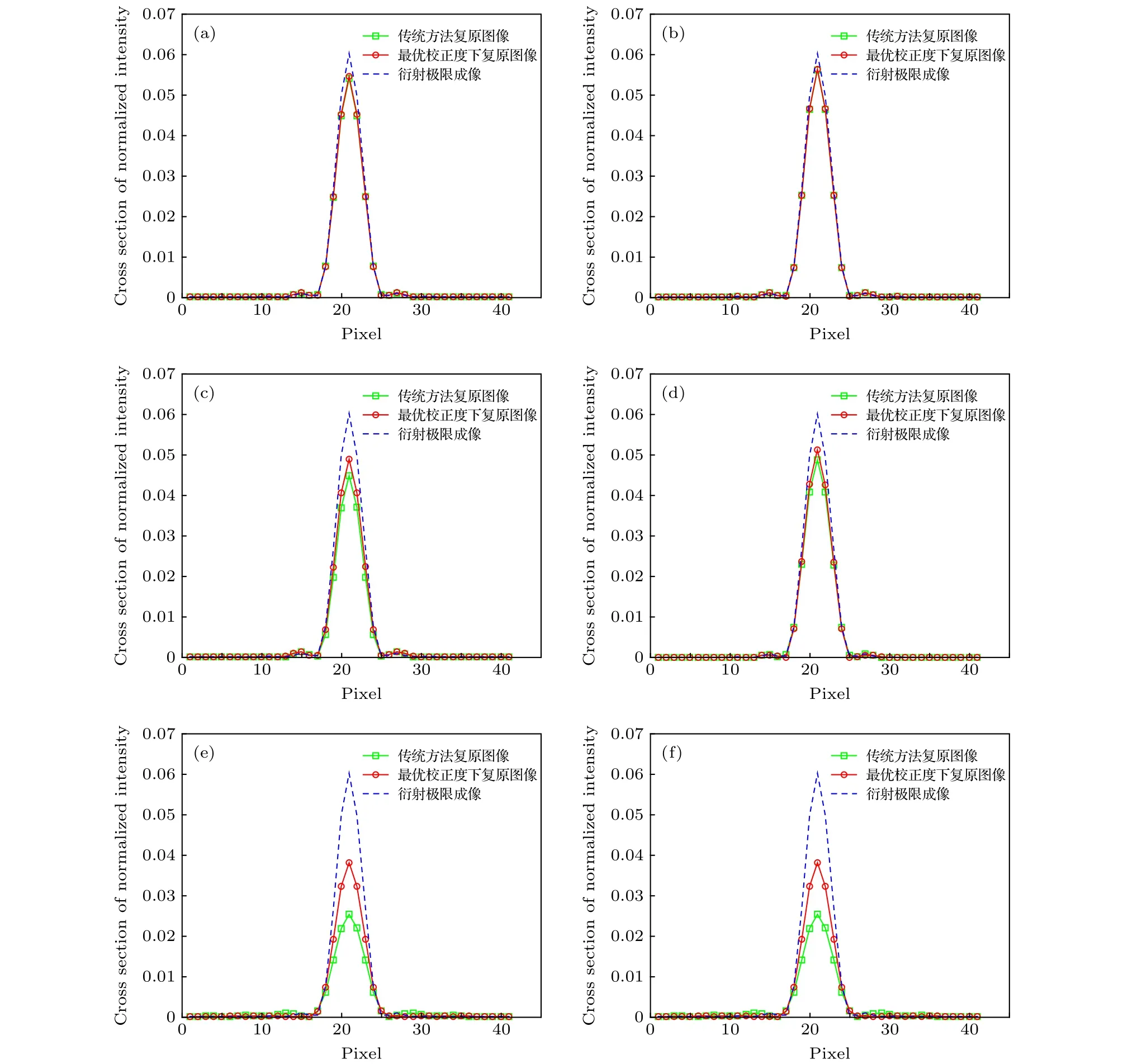
图8 61单元变形镜在噪声方差 (10–4)2下能量归一化截面图的比较(a) Z4; (b) Z5; (c) Z8; (d) Z9; (e) Z12; (f) C1Fig. 8. Cross section of normalized intensity under noise variance (10–4)2 with 61-element DM: (a) Z4; (b) Z5; (c) Z8; (d) Z9; (e) Z12;(f) C1.
可见, 在三种强度噪声下, 各像差对应的结果都存在相似的规律, 即随着b的降低, 先出现全局最大值, 然后总体趋势趋于下降, 这体现了上节中分析的校正度在波前重构精度和波前残差RMS下的权衡关系, 证明了最优校正度的存在.
为进一步验证以上结果, 用37单元变形镜模型做了相同的仿真, 37单元变形镜相对于61单元变形镜, 少了最外层一圈驱动器, 拟合能力降低.图7是37单元变形镜在不同噪声强度下复原图像的相对SR, 结果显示具有同样的规律.
搜索最优校正度可以看作一个优化方向确定且优化参数只有一个的无约束优化问题, 用线搜索方法如黄金分割法[21]可以快捷地搜索到最优值.针对以上六种像差类型, 在61单元变形镜、噪声方差(10–4)2情况下, 用搜索算法得出了每种像差下的最优校正度和相对SR, 并给出了传统方法复原图像、最优校正度下的复原图像、衍射极限图像的截面图比较, 结果如表1和图8所示.
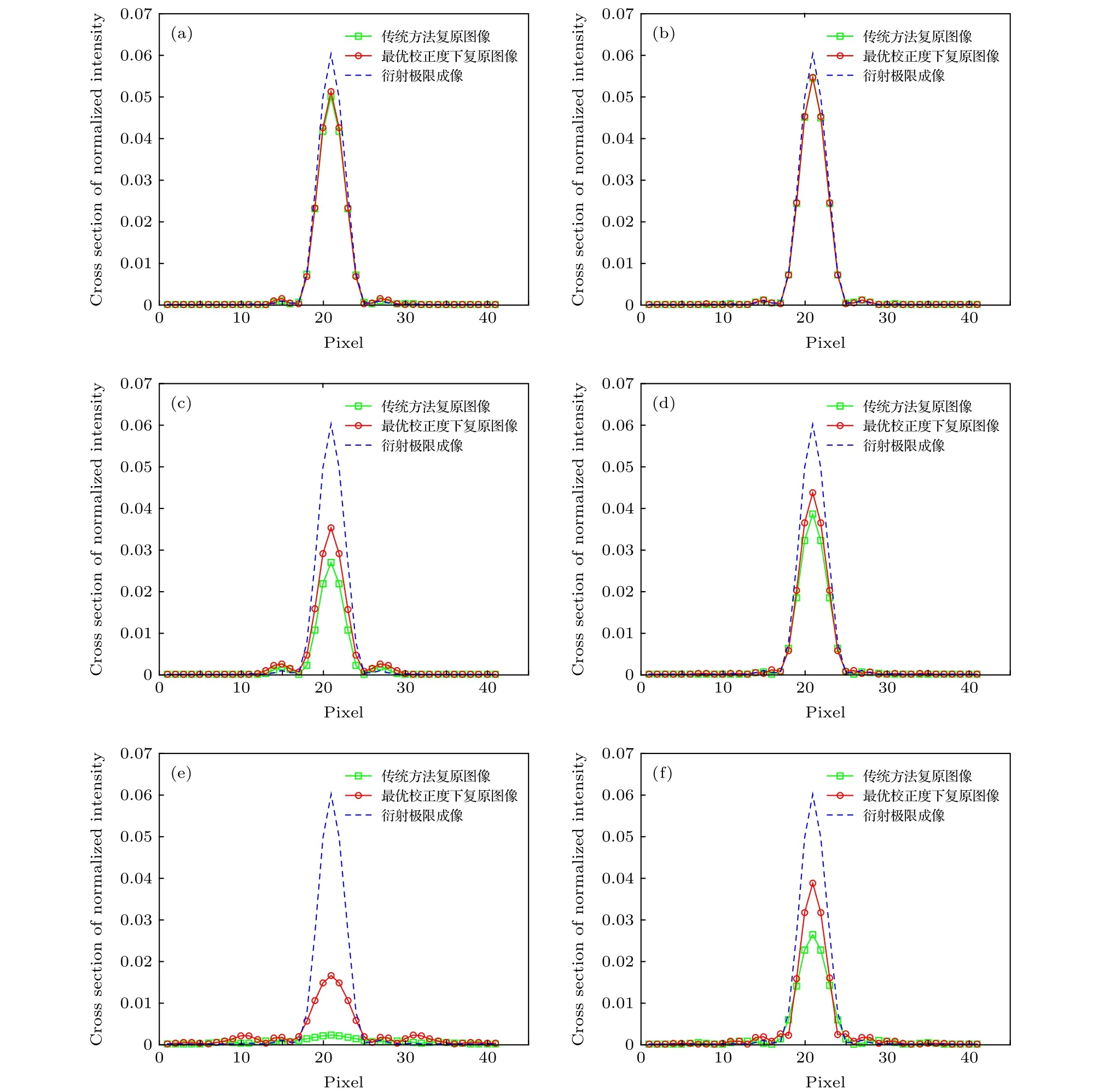
图9 37 单元变形镜在噪声方差 (10–4)2下能量归一化截面图的比较(a) Z4; (b) Z5; (c) Z8; (d) Z9; (e) Z12; (f) C1Fig. 9. Cross section of normalized intensity under noise variance (10–4)2 with 37-element DM: (a) Z4; (b) Z5; (c) Z8; (d) Z9; (e) Z12;(f) C1.
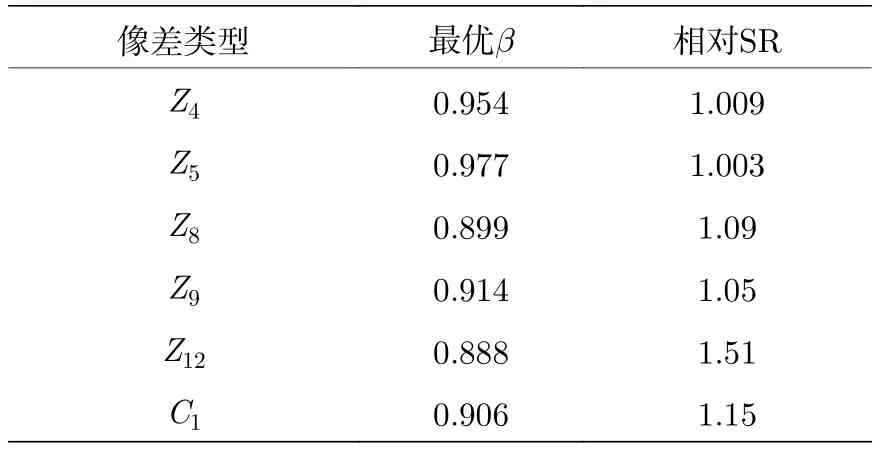
表1 61单元变形镜在噪声方差 (10–4)2 下的结果Table 1. Results under noise variance (10–4)2 with 61-element DM.

表2 37 单元变形镜在噪声方差 (10–4)2 下的结果Table 2. Results under noise variance (10–4)2 with 37-element DM.
再用37单元变形镜进行仿真, 条件同上, 结果如表2和图9所示.
从以上两组仿真中可看出, 对于两种变形镜,最优校正度下的复原图像SR均有不同程度的提升. 在每一组结果中,Z4,Z5提升效果较小,Z8,Z9较大,Z12效果最明显, 这是因为这三类像差在Zernike 像差中径向频率分别为n= 2, 3, 4, 随着径向频率数的增大, 像差空间频率增高, 变形镜对像差的拟合能力降低、残差增大; 同理, 37单元变形镜下各像差对应SR的提升幅度都要大于61单元变形镜, 这也是因为37单元变形镜拟合能力弱于61单元变形镜, 其校正残差更大. 由于校正残差主要是由波前探测器探测范围外的高频成分构成, 当残差增大时, 在最优校正度下高频像差的削减量也越大, 相应对复原图像质量的改善作用就越强, 由此可以得出, 针对拟合残差较大的系统, 本文提出的方法更加有效. 如今在复杂的探测条件下, 抑或是由于经济成本而采用的廉价的设备, 有较大残差的AO系统是广泛存在的, 因此, 本文提出的方法具有很大的应用潜力.
5 结论
在传统的AO技术结合事后图像解卷积的方法下, AO系统的校正残差以超出波前探测器探测范围的高频像差为主, 这将造成波前传感器波前复原精度的下降并最终导致复原图像的失真. 本文通过提出校正度的概念, 将AO系统和图像复原过程结合起来, 使得复原图像的信息得以参与AO系统的控制过程, 并且论证了校正度存在一个最优值.通过将最优校正度反馈到AO系统实现了对控制电压的修正, 成像系统的输出图像能够使复原算法发挥更大的效能, 最终得到的复原图像相比于传统方法所获得的复原图像具有更好的质量. 该方法对于校正器拟合残差较大的AO系统更加具有应用潜力.
这种把AO技术和图像复原技术看作一个整体的控制思想, 在这之前还未有文献报道, 这也给相关领域的研究提供了一种新的思路.
下一步, 我们将在1.8 m光学望远镜的新一代AO系统上对本文方法进行实验验证, 该系统采用73单元变形镜和9 × 9阵列哈特曼-夏克波前传感器进行实时大气湍流测量和校正以获取I波段和J波段的天文目标高分辨力图像. 实验中将利用另外一套17 × 17阵列高分辨率哈特曼-夏克波前传感器或PD相位差传感器进行系统波前残余误差测量并结合图像处理进行系统优化控制.
猜你喜欢
疯狂英语·新悦读(2022年8期)2022-09-20 01:32:12
网络安全与数据管理(2022年3期)2022-05-23 13:26:48
陶瓷学报(2020年6期)2021-01-26 00:38:22
北京航空航天大学学报(2020年10期)2020-11-14 09:26:02
紫禁城(2020年8期)2020-09-09 09:38:04
石家庄铁路职业技术学院学报(2019年3期)2019-10-30 03:26:32
自动化学报(2019年6期)2019-07-23 01:18:32
河南科技(2015年8期)2015-03-11 16:23:52
航天返回与遥感(2014年4期)2014-07-31 17:47:47
长江大学学报(自科版)(2014年7期)2014-03-20 13:21:02