自适应水位的水电站浮标控制系统
2020-03-30 13:58罗新飞朱悦林丰健王沈利雄懋叶凌箭马修水
化工自动化及仪表 2020年1期
罗新飞 朱悦林丰 健王 霄 沈利雄 薛 懋叶凌箭马修水
(1.浙江静远电力实业有限公司;2.浙江大学宁波理工学院信息学院)
水力发电作为一种高效清洁的能源,在我国电力能源结构中占据很大比例。据统计,我国水能资源可开发装机容量约6.6亿千瓦,年发电量约3万亿千瓦时,按利用100年计算,相当于1千亿吨标煤,在常规能源资源剩余可开采总量中仅次于煤炭[1]。经过多年的发展,我国水电装机容量和年发电量已突破3亿千瓦和1万亿千瓦时,分别占全国的20.9%和19.4%,水电工程总量居世界前列。
坝式水电站以发电为主,兼有航运、过木(竹)及防洪等综合功能。面对航运、过木(竹)等功能需求,为保证电站更安全地运行,提升电力系统的安全稳定性,水库坝前应设置外来船只禁入警戒线,对船只通行进行提示。现阶段存在的问题:一是水电站兼有航运、过木(竹)的功能,需对大坝上游水库上游警戒区进行封闭,有船只通行时,要人工解除锚链连接,费时费力,需要专人看守负责,而且对操作人员来说水上作业也有一定的安全风险;二是由于电站工作生产用船、过坝工作用船的泊位在300m警戒区以内,影响日常工作用船的频繁出入,也存在着要人工解除锚链连接和专人负责看守警戒线的问题。
在水面放置浮标是一种警示方案,其中系留式浮标采用锚链固定在某一水区,适合放置于流动水面[2]。居青春介绍了青海湖水文气象全自动观测浮标系统,该系统是一套无人值守的系留式全自动观测系统,浮标每分钟自动测量、采集、存储、运算,每隔30min自动将生成的报文经FY-3卫星传送到北京CDAS地面站[3]。李晴以我国近海3m海洋监测浮标为基础,对浮标体、北斗卫星通信系统和岸站接收系统三大模块进行了设计和优化,解决了海洋浮标易偷盗、易腐蚀、产品质量不高及需定期换电池等问题,从而构建了一套新型且功能完善的海洋浮标监测系统[4]。
国内不少水电站在建成投产之后,未在上水库坝前设置“外来船只禁入”的警戒线,对电站的安全稳定运行有一定的影响。紧水滩水电站的外来船只禁入的安全漂浮警戒线的设置由浮标和锚链连接而成,两端分别用混凝土锚桩固定后对大坝上游警戒区进行封闭。浮标水上部分设立“大坝禁区、严禁进入”等警示标语。
笔者采用的方法是在坝式水电站设置由系留浮标装置组成的开放式安全漂浮警戒标识,提醒靠近警戒区的船只减速,“未经许可,不得进入”的安全漂浮警戒线。由于汛期或旱期,水库水位变化可达几十米甚至上百米,常规的系留浮标装置在水面上漂移位置变化过大,警示区域不清晰,而且妨碍来往通行船只的安全,存在一定的安全风险。 市场上已公开的技术中[5~9],难以全面解决这些问题。对此,设计自适应水位的系留式浮标装置及其自控系统,以浮标在水中的沉浸深度为被控变量,设计基于扩展卡尔曼滤波的观测器,实现浮标装置的快速稳定控制。
1 自适应水位系留浮标
如图1所示,笔者设计的自适应水位系留浮标装置由浮标主体、电源系统、智能控制系统、驱动系统及附件等模块组成。
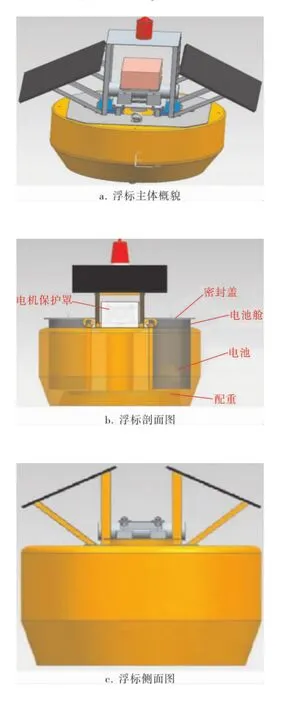
图1 自适应水位系留浮标结构与浮标原理
浮标主体为圆形结构,内部留有空腔,用于放置蓄电池、智能控制模块、电机及绞盘等部件。
电源系统包括太阳能充电板和蓄电池。太阳能板沿顶部表面朝两个方向铺设并用螺栓固定,蓄电池放置于浮标底部一侧空腔,另一侧空腔放置重量相当的配重块。电源系统和蓄电池通过线缆连接,固定于浮体内表面壁上。蓄电池给整个控制系统和驱动系统提供能源,同时与配重块一起作为负重部件对浮标起稳定作用。
智能控制系统由浮球式液位传感器、单片机控制板及其控制算法组成。浮球式液位传感器安装于浮标外侧下部,测量水面超过传感器底部的液位高度。为增加测量的可靠性,浮标两侧各安装一个浮球式液位传感器。单片机控制板由单片机芯片、采样输入输出电路(A/D、D/A)等模块组成。此外,控制板上还装有陀螺仪,用于测量浮标倾角、角速度等信息。通过测量浮标在水面上的沉浸高度,控制电机进行收放绞盘的动作,实现绳索长度的实时调节,其基本原理是:设定浮标装置沉浸液位的上下限,如果液位小于下限,收绳索直至回复到设定范围;反之则放绳索。控制的最终效果为浮标绳索处于略收紧的状态,实现浮标体沉浸的自适应控制。
驱动系统为绞盘电机,电机接收控制系统发出的转动信号,按照动作要求执行正转/反转,实现收紧/释放绞盘功能。
附件包括锚链、警示标识及警示灯等。锚链悬挂于绞盘上,穿过浮标底部空间,链长度大于使用水域的水位最大高度,警示标识和警示灯悬挂/安装于浮标外部显眼位置,使用防水胶、螺栓等固定。浮标装置的实物与现场工作图如图2所示。

图2 浮标实物与现场工作图
2 智能控制系统
2.1 基于扩展卡尔曼滤波器的沉浸高度估算
笔者设计的浮标装置侧面各安装一个浮球式液位传感器,通过控制浮标在水中的沉浸高度实现自适应控制。由于测量点易受天气、水面条件等扰动影响,测量值含大量噪声,容易造成执行机构的误动作或频繁动作。此外,在风力、水流等外力作用下,浮标主体可能倾斜。对此,在控制板上安装陀螺仪,测量浮标倾角α和角速度ω(ω=α˙=dα/dt,α˙为α对时间的导数),则沉浸高度h的状态方程可写为:
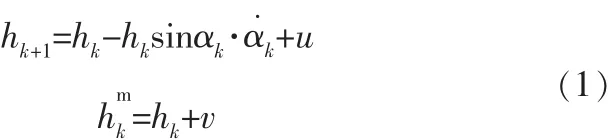
式中hm——沉浸高度测量值;
u——过程噪声;
v——测量噪声。
在第k步,扩展卡尔曼滤波(EKF)包括预测与更新两步[10]。预测算法如下:
更新算法如下:
通过以上两步迭代预测与更新,得到沉浸高度的预测结果。图3对比了滤波前后的沉浸高度,其中在100s时沉浸高度h(t)产生阶跃渐变。可以看到采用EKF方案能明显改善噪声的影响,提高预测准确度。
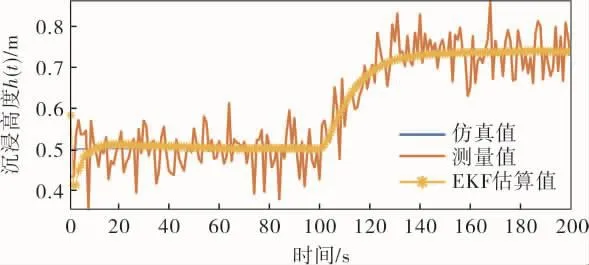
图3 沉浸高度滤波效果
2.2 自适应控制算法
笔者提出的浮标自动调节算法由绳索竖直角度控制算法(算法1)和浮标在水面上的沉浸高度控制算法(算法2)组成。
竖直角度控制算法(算法1)。设定角度的上限值为αmax,t时刻的执行规则为:
a.当α(t)>αmax时,转动电机,使之执行收绳索动作;
b. 当0.5αmax≤α(t)≤αmax且当前电机执行收绳索的动作时,继续保持收绳索动作;
c.当α(t)<αmax时,算法1不产生动作信号。
沉浸高度控制算法(算法2)。设浮标装置自由漂浮时的目标液位高度为h0(即传感器下沿距水面的距离),控制器的液位设定上、下限分别为h0+b、h0+a。其中,h0于投放时测定;a、b为阈值,由实验确定其合理取值(b>a>0)。在t时刻,具体执行规则为:
a.当h^(t)<h0+a时,无论当前电机执行何种动作,均转动电机使之执行收绳索的动作;
f.若发生不符合以上条件的情况,算法2不产生动作信号;
g.若算法1和算法2的结果相互冲突,优先执行算法1的结果。
执行算法1和算法2,呈现出的效果为浮标的绳索基本保持竖直方向(浮标位于锚的正上方),浮标装置的传感器下端离水面的液位高度控制在[h0+a,h0+b],使绳索始终处于略收紧的状态。
2.3 异常状况报警
若传感器产生故障信号,控制板控制外部输出电路,使警示灯发出每5s闪烁一次的故障信号;在异常状况下,如执行机构卡死或蓄电池电量不足等,可能导致系统工作不正常。对此,若判定h^(t)连续10个采样时间h^(t)>h0+b或h^(t)<h0+a成立,则控制板控制外部输出电路使警示灯发出每1s闪烁一次的故障信号;若连续10个采样时间α^(t)>1.2αmax,则控制板控制外部输出电路,使警示灯发出每3s闪烁一次的故障信号。
3 结束语
笔者设计了一种自适应水位的浮标装置及其控制系统,浮标装置被用于水位大落差的坝式水电站,给通行船只提供警示功能。目前,该浮标装置已投入实际应用3个月,工作运行稳定、准确。以未投运前平均每天耗费人工3h计算,投运该装置已节省人工270h以上,保证了通行船只的安全,具有一定的经济效益和社会效益。
猜你喜欢
垂钓(2022年3期)2022-05-14
垂钓(2022年1期)2022-02-09
船海工程(2021年6期)2021-12-17
舰船电子工程(2021年5期)2021-06-04
船舶标准化工程师(2020年1期)2020-06-12
舰船科学技术(2020年3期)2020-04-22
垂钓(2019年2期)2019-09-10
船海工程(2019年3期)2019-07-03
电子制作(2019年23期)2019-02-23
教育教学论坛(2017年34期)2017-08-30