基于B样条曲线的电力巡检机器人越障控制
2020-03-27 08:11宋丽敏
自动化与仪表 2020年3期
张 刚,宋丽敏,龚 健,王 良
(南网广东电网有限责任公司佛山供电局,佛山528500)
电力巡检机器人在野外作业通常会遇到障碍物的阻碍, 导致电力巡检机器人的作业半径受限,因此需要进行电力巡检机器人越障控制优化设计。基于B 样条曲线(B-spline curve)是一种特殊的表示形式, 通常在数学的总多子学科数值里被应用,它是B-样条基曲线的线性组合[1],随着人工智能技术的发展,基于B 样条曲线的电力巡检机器人越障控制技术通常采用人工智能控制,提高电力巡检的效率。 建立电力巡检机器人越障的自适应控制模型,可以提高电力巡检机器人越障控制和稳态跟踪能力。 相关的电力巡检机器人越障控制方法研究在机器人的设计和稳定性控制中具有重要意义[2]。
文献[3]提出新型四臂巡检机器人结构转向越障研究,采用一种三轴复合转动的关节构建新型四臂巡检机器人, 分析该机器人的转向越障的步态,表示该机器人具有转向越障能力。 文献[4]提出基于谐波势场的移动机器人避障控制,在共享控制器中加入了一个自适应的、 近似连续的控制分配函数,该函数根据机器人相对于障碍物的位置,不断地改变人类的控制力和自主性。 此外,在自主控制输入中还包含一个鲁棒的前馈项,以在存在不利的人为输入时保持稳定性,保证所开发的共享控制器的有限时间稳定性,即在人类导航机器人时,自主性保证了避障。
对电力巡检机器人越障控制是建立在机器人的运动学参数特征分析基础上,本文提出基于B 样条曲线的电力巡检机器人越障控制技术,构建电力巡检机器人越障控制约束参数模型,采用B 样条曲线跟踪寻优方法进行机器人的越障路径规划,采用自适应的模糊信息加权方法,进行电力巡检机器人越障控制优化。 最后进行仿真测试分析,得出有效性结论。
1 被控对象及电力巡检机器人越障运动学模型构造
1.1 被控对象模型
为了实现基于B 样条曲线的电力巡检机器人越障控制,首先需要构建电力巡检机器人的被控对象模型, 结合电力巡检机器人驱动动力学分布,进行电力巡检机器人的定位控制,采用避障算法进行电力巡检机器人巡检过程中的越障控制,基于姿态信息参量采集结果,进行电力巡检机器人越障控制中的参数调节[5],采用分布式传感器定位跟踪技术,进行电力巡检机器人越障控制的识别。 控制电力巡检机器人驱动步行,采用定姿测量方法进行机器人的位姿参数采集,提取电力巡检机器人的位姿跟踪信息。 根据电力巡检现场的态势感知进行越障控制和机器人对目标路径的动态[6],得到电力巡检机器人越障控制的总体实现结构如图1 所示。
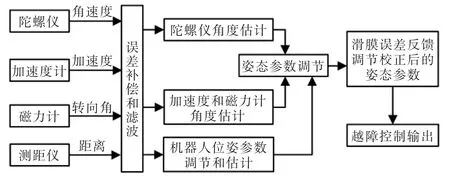
图1 电力巡检机器人越障控制结构图Fig.1 Obstacle surmounting control structure of electric inspection robot
采用分布式传感器阻力力学采集方法进行电力巡检机器人的巡检特征参数采集,对采集的电力巡检机器人越障控制信息采用动态融合识别,结合姿态参量测量方法,进行电力巡检机器人的巡检过程控制[7],构建电力巡检机器人的巡检的动力学参数采样模型为

式中:p(xt)表示电力巡检机器人的巡检动力系数;Vm表示电力巡检机器人的巡检定力速度。 结合模糊阻尼力跟踪方法,进行电力巡检机器人的巡检参数分析,对越障方向的路径进行自适应跟踪[8],得到在纵平面x1Oy1内,电力巡检机器人的巡检路径分布。
在存在障碍物的环境下采用等效动态识别方法,进行电力巡检机器人的巡检过程的收敛性控制[9],得到电力巡检机器人的运动学模型为

式中:ωy1和ωx1分别表示电力巡检机器人的感知态势检测参数;Jx和Jz分别表示电力巡检机器人的加速度信息值;σ 表示电力巡检机器人的感知态势系数。 在动力学耦合参数约束下,得到电力巡检机器人驱动控制对象模型为

式中:Jy表示电力巡检机器人的加速信息模拟值,在驱动控制对象模型的基础上,得到电力巡检机器人的模糊信息融合参数。 在惯性力矩的约束下,电力巡检机器人的模糊度分布矩阵采用非对角惯性寻优方法[10]。根据上述分析,进行电力巡检机器人的被控对象描述。
1.2 电力巡检机器人越障运动学模型
在进行电力巡检机器人的被控对象分析的基础上,结合位姿参数的自适应调节方法进行电力巡检机器人越障运动学模型构造,采用空间扰动性融合方法,进行电力巡检机器人越障连杆运动参数分析,得到连杆参数集为q1= [q1,…,q7]T,sinqi和cosqi分别记为sqi和cqi,并简记为si和ci,表示电力巡检机器人的空间转动力矩,在坐标系i 和i-1 之间构建电力巡检机器人的动态障碍的测距齐次矩阵Ti(qi)可表示式为
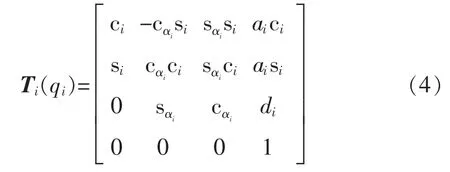
在4×4 的齐次坐标系中,得到电力巡检机器人的转动力矩特征量。 电力巡检机器人驱动跟踪冲量在位姿参数调节下,可控制电力巡检机器人的控制约束参数。 在刚性约束下,得到电力巡检机器人驱动给越障控制参数为

式中:L 为机器人倾斜误差轨迹长度。 根据上述分析,建立电力巡检机器人越障运动学模型,提高机器人的越障控制能力[11-12]。 其电力巡检机器人越障运动学模型如图2 所示。
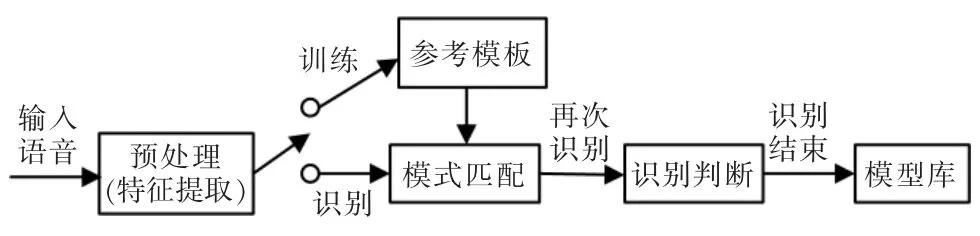
图2 电力巡检机器人越障运动学模型图Fig.2 Obstacle surmounting kinematic model of electric inspection robot
2 电力巡检机器人越障控制技术优化
2.1 电力巡检机器人越障扰动控制
建立电力巡检机器人越障控制目标函数,采用B 样条曲线跟踪寻优方法进行机器人的越障路径规划[13],得到空间路径规划函数为

式中:w(k)表示电力巡检机器人的自适应加权系数;A,B,C,D,F1,F2为越障控制下机器人信息参数;ΔA,ΔB 为电力巡检机器人的扰动增量,在电力巡检机器人的越障扰动参数形式为

式中:G∈Rr×l,A1∈Rl×p,B1∈Rl×q为电力巡检机器人驱动矩阵;F∈Rl×l为电力巡检机器人的逆运动参数分布,满足条件FTF≤I,电力巡检机器人的模糊参考系数r,l 为正整数,并记:

采用自适应PID 控制方法,得到电力巡检机器人的空间分布矩阵满足。 采用变步长反馈跟踪调节方法,进行电力巡检机器人的模糊融合,得到加权系数M={mi∣i=1,2,…,m},构造电力巡检机器人的寻优控制模型方程为

式中:wi(k)和vi(k)为科氏力和离心力矩阵,在B 样条曲线约束下,得到电力巡检机器人越障扰动控制流程如图3 所示。
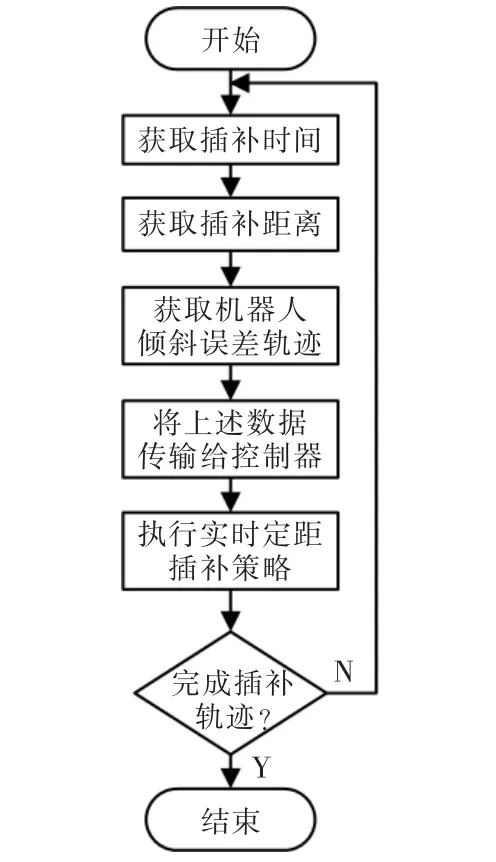
图3 电力巡检机器人越障扰动控制流程Fig.3 Obstacle crossing disturbance control flow chart of electric inspection robot
根据电力巡检机器人越障扰动控制流程原理,得到电力巡检机器人越障扰动控制输出模型的稳定收敛。
2.2 越障路径规划优化
求得电力巡检机器人最优越障控制参数模型mj(j=1,2,…,m)(∀mj∈M),采用最大似然估计方法,建立电力巡检机器人最优越评估协方差矩阵Pj(k)。 计算时刻电力巡检机器人的正运动学模型mj(j=1,2,…,m)(∀mj∈M),电力巡检机器人的最优参数融合结果为

式中:Λj(k)服从均值为0、方差为Sj(k)的正态分布,Sj(k)为不同步长所对应的机器人质心水平位移,构建差异性分布的协方差矩阵,采用测距仪进行机器人越障控制中的信息采集和融合[14-15],得到机器人越障控制的适应度模型为

对机器人的位姿信息进行自适应修正,得到电力巡检机器人的空间位姿分量。 综上分析,采用自适应的模糊信息加权方法,进行电力巡检机器人越障控制优化。
3 仿真实验结果分析
为了验证本文方法在实现电力巡检机器人越障控制中的应用性能,进行仿真实验分析,实验中采用的电力巡检机器人为ROBDLH 型激光传感电力巡检机器人,机器人对环境信息采样的二维地形图如图4 所示。
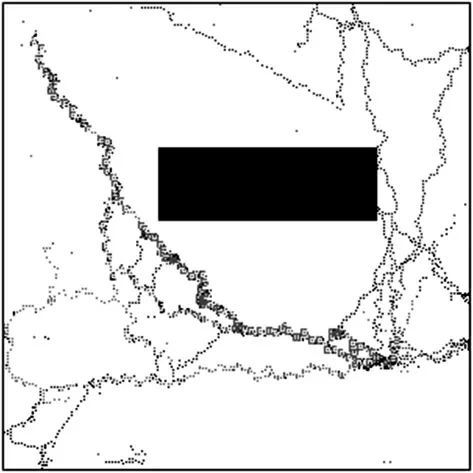
图4 巡检机器人工作环境的二维地形图Fig.4 Two dimensional topographic map of inspection robot working environment
在图4 所示的工作环境中,进行电力巡检机器人越障控制仿真分析,假设障碍物的分布网格区域为7643,自适应迭代的次数为120,根据上述参数设定,进行电力巡检机器人越障控制,得到越障路径结果如图5 所示。
由图5 可知,采用本文方法进行电力巡检机器人越障控制, 其越障控制的解析值接近理论值,测试控制结果自适应性能较好。 为进一步验证其应用性能,对比文献[3]和文献[4]方法,验证电力巡检机器人越障控制灵敏度对比结果,如表1 所示。
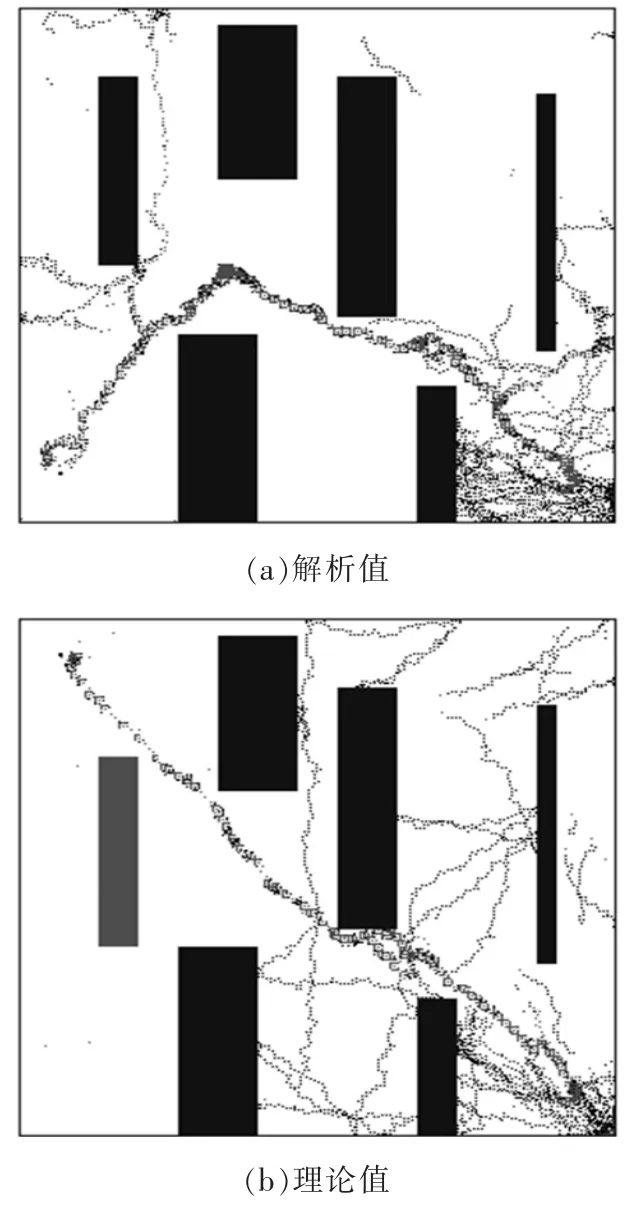
图5 电力巡检机器人越障控制结果Fig.5 Obstacle surmounting control results of electric inspection robot
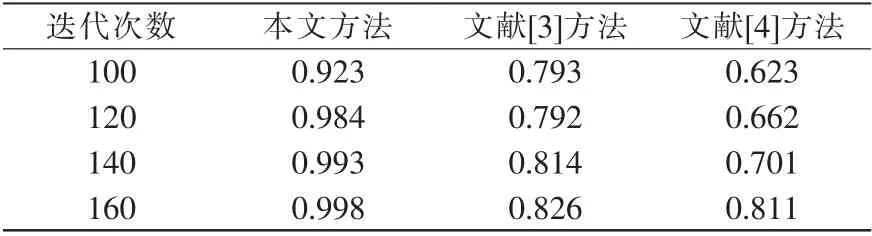
表1 电力巡检机器人越障控制灵敏度对比结果Tab.1 Comparison results of obstacle surmounting control sensitivity of electric inspection robot
由表1 可知,利用本文方法进行电力巡检机器人越障控制的灵敏度较高, 在进行多次实验验证时,本文方法的灵敏度最终可达0.998,高于文献[3]方法和文献[4]方法的灵敏度测试结果。 这是由于本文方法在进行电力巡检机器人的巡检过程实行收敛性控制。 在相同时间内,进行电力巡检机器人的运动轨迹分布情况对比,得到其电力巡检机器人运动轨迹分布对比结果如图6 所示。
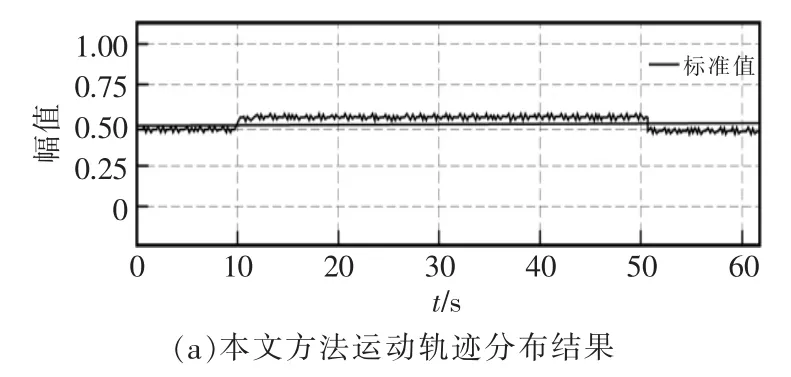
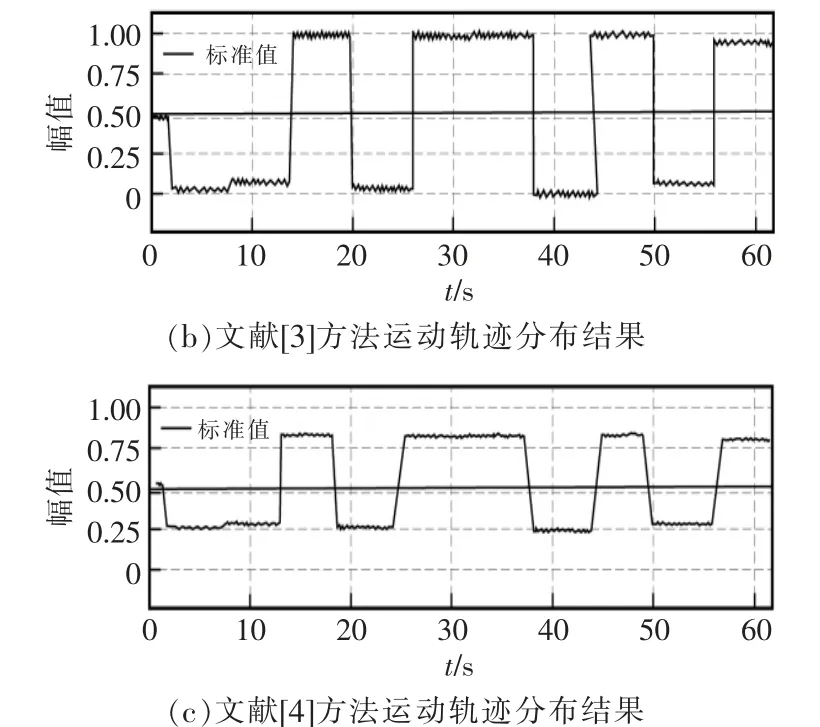
图6 三种方法电力巡检机器人运动轨迹分布对比结果Fig.6 Comparison results of three methods of electric inspection robot motion track distribution
根据图6 可知,在相同时间内,利用文献[3]方法和文献[4]方法进行电力巡检机器人运动轨迹测定分布结果不均匀,且远离运动轨迹标准值;而利用本文方法进行电力巡检机器人运动轨迹测定分布结果稳定,在标准值上下浮动,接近运动轨迹的标准值。 基于B 样条曲线的电力巡检机器人运动情况,能够实现越障控制的安全,保障正常运行,在一定程度上提高了电力巡检机器人越障性能。
4 结语
进行电力巡检机器人越障控制优化设计,建立电力巡检机器人越障的自适应控制模型,提高电力巡检机器人越障控制和稳态跟踪能力,本文提出基于B 样条曲线的电力巡检机器人越障控制技术,构建电力巡检机器人越障控制约束参数模型,结合位姿参数的自适应调节方法进行电力巡检机器人越障运动学模型构造,结合空间扰动性融合方法进行电力巡检机器人越障扰动控制,采用B 样条曲线跟踪寻优方法进行机器人的越障路径规划,采用自适应的模糊信息加权方法,进行电力巡检机器人越障控制优化。 分析得知,本文方法进行机器人越障控制的自适应控制能力较强,提高了电力巡检机器人越障性能,具有很好的应用价值。
猜你喜欢
北京航空航天大学学报(2021年7期)2021-08-13
图学学报(2020年5期)2020-11-13
空间科学学报(2020年6期)2020-07-21
中国惯性技术学报(2019年3期)2019-10-15
电子制作(2019年15期)2019-08-27
中国惯性技术学报(2019年6期)2019-03-04
软件(2017年6期)2017-09-23
火控雷达技术(2016年2期)2016-02-06
海军航空大学学报(2015年1期)2015-11-11
国外科技新书评介(2014年11期)2014-12-08