V2G系统中三电平逆变器改进型SVPWM算法研究
2020-03-27 06:47杨龙团王继东范丽波
通信电源技术 2020年22期
杨龙团,王 鹏,王继东,范丽波
(1.许昌学院 国际教育学院,河南 许昌 461000;2.华北水利水电大学 电力学院,河南 郑州 450000)
0 引 言
V2G技术最早在1995年由Amory Lovins提出,然后由美国特拉华大学William Kempton教授及其团队进一步发展[1]。三电平逆变器具有输出容量大、输出电压高以及功率器件的开关频率低等特点,被广泛应用到新能源发电并网、V2G技术、柔性交流输电以及无功补偿等多个领域。
高效的调制算法有利于逆变器输出性能的提高,且易于数字实现。电压利用率高的SVPWM技术在三电平逆变器中具有广泛应用。文献[2]提出空间矢量脉宽调制算法,用直流侧电容电压来确定所使用的小矢量。文献[3]提出二极管箝位型逆变器的工作原理和拓扑结构,并建立数学模型。文献[4]提出大小矢量法对空间电压矢量进行分类。文献[5]和文献[6]推导出空间矢量划分之后大小扇区的判断准则。文献[7]利用伏秒平衡计算矢量的作用时间,采用归一法将其他扇区都归到第一扇区进行计算,使算法得到简化。文献[8]根据开关的关断频率特点设计出开关管的作用顺序,并研究了SVPWM信号的产生原理。文献[9]研究了基于双环控制的三电平逆变器并网策略。文献[10]准确测量出V2G系统中电动汽车的充放电损失,分析出电网集成车辆系统的功率损耗,给充电系统的设计提供了参考。
上述文献方法在SVPWM调制算法简化方面还有很大改进空间。本文提出一种基于60°坐标系的改进型SVPWM算法,能够使基于V2G系统的三电平逆变器在并网控制过程中减少输出电能的总谐波含量,并能简化SVPWM调试算法。最后通过仿真验证提出的改进型SVPWM调制算法提高三电平逆变器输出电压等级,在输出电能质量的改善方面具有显著效果。
1 二极管箝位型三电平逆变器空间矢量原理
三电平逆变器的拓扑结构如图1所示,由两个串联的电容和4个桥臂组成,每个桥臂包含4个IGBT开关管和两个二极管,其中二极管也被称作箝位型二极管,两电容之间的点被称为中点O,因此也被称作为中点箝位型逆变器[11,12]。

图1 三电平逆变器拓扑结构
三电平逆变器的等效开关模型如图2所示,其中Sip、Sio、Sin(i=a、b、c)分别对应的是3个桥中的3个开关触点[13]。逆变器中的每相桥臂均有3种状态,分别为P状态、O状态以及N状态,对应的分别用1、0、-1表示,与3个状态相对应的输出相电压分别为Udc/2、0以及-Udc/2。用开关函数Si来定义三电平逆变器的输出状态如式(1)。

图2 三电平逆变器的等效开关模型

根据前边的分析可知,逆变器共有27种开关状态,其合成电压矢量数为27个。根据空间电压矢量幅值的大小,能够将这27个空间电压矢量分为大矢量、中矢量、小矢量以及零矢量,具体如表1所示[13]。

表1 空间电压矢量分类
2 基于60°坐标系三电平SVPWM算法改进
逆变器控制指令的电压参考矢量会以角频率ω在空间平面旋转,旋转到每个区间内都会有3个基本空间矢量来合成矢量Ur,功率开关管的状态对应着此空间矢量的状态,因此通过控制开关管的闭合与断开就能合成相应的Ur。当Ur每旋转360°,逆变器就会对应输出一个周期的正弦波。由文献可知通常的SVPWM调制算法存在计算量大的问题,这样就不利于芯片里面进行编程。基于此本文提出一种基于60°坐标系的调制方法,该调制方法能够通过坐标的变换使得扇区判断和时间计算得到简化[14]。60°坐标系下第一大扇区的矢量图如图3所示。

图3 60°坐标系下第一大扇区的矢量图

在g-h坐标系下,定义小矢量的长度Vdc/3为单位长度1,于是得到参考矢量ref的坐标(g,h),其中g=3Vg/Vdc,h=3Vh/Vdc。如图 3 所示1对应的g-h坐标是(1,0),通过坐标变换后的大扇区判断规则如表2所示。

表2 大扇区选择规则
判断完大扇区之后,对于不属于第一大扇区的空间矢量都旋转-60°[N-1](顺时针为正)至第一扇区进行判断,图4是以第二扇区旋转到第一扇区为例进行的分析。

图4 60°坐标系下矢量旋转示意图

由式(3)能够得出从第二大扇区旋转到第一大扇区的变换关系如下:


综上就能确定空间矢量落所落在的任意一个大扇区的,以第一大扇区为例,每个扇区6个小扇区的判断规则如表3所示。

表3 小扇区的判断规则
在g-h坐标系下有:

综上可知,在每次计算矢量作用时间的时候,计算一次g和h就可以用来进行矢量作用时间的计算,这样就能简化计算量大且复杂的SVPWM调制算法。
3 基于电网电压定向的并网控制
在V2G系统中,电动车电能最终是要实现并网,所以对于三相并网逆变器控制而言,为简化运算可以将三相静止abc坐标系转换成两相静止αβ坐标系,然后再转化成两相同步旋转dq坐标系。3种坐标系可以同时表示出来,如图5所示。

图5 矢量控制关系图
由图5可知,三相静止abc坐标系转换到两相静止坐标系αβ后,α轴与a轴重合,β轴超前α轴90°相角。可得转换坐标关系如下:

式中,Clark变换矩阵为:

将αβ坐标系转换成两相dq坐标系,可得:

式中,Park变换矩阵为:

由图5可知,假设在dq坐标系中d轴始终和电网电压矢量E保持重合,则该控制被称为基于电网电压定向的矢量控制。由矢量关系得ed=|E|,eq=0。假设用p表示系统的有功功率,用q表示无功功率,则由瞬时功率理论可得[15]:
由式(11)可得,可以通过调整idiq来实现对逆变器有功功率和无功功率的控制。在V2G系统中电池侧输入的有功功率的瞬时值是p=idcudc,当系统开关处于理想状态时有如下关系:

由式(12)可知,假设电网电压恒定不变,并网电流的d轴分量、直流侧电压以及有功功率存在着一种正比例的关系,因此可以调整id实现对直流侧电压的控制。对电网电压采样,将采集到的ea、eb、ec通过abc-αβ转换,获得在静止坐标系αβ下的表达式eα、eβ,最后计算 sinωt和 cosωt如下:

由以上分析能够得到如图6所示的三电平逆变器的总体控制结构。
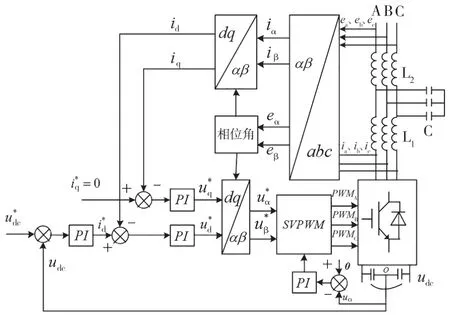
图6 基于电网电压定向的矢量控制结构
该控制系统由电压外环和电流内环组成双环控制系统,内环电流主要控制有功和无功功率,外环电压主要控制直流母线电压。
4 仿真分析
改进型SVPWM算法在V2G系统中以三电平逆变器并网控制为基础,在Simulink仿真软件中搭建仿真模型。仿真模型主要由SVPWM模块和三电平逆变桥模块组成,控制采用基于电网电压定向的双闭环PI控制策略。
仿真离散时间为0.000 5 s,SVPWM的控制周期Ts=1/2 000 s,输出频率f0=50 Hz,控制频率为12.5 kHz,采样频率为12.5 kHz,直流母线电压UDC=700 V,额定交流电压380 V,调制度m=0.8,滤波电感L=0.07 mH,滤波电容C=40 μF。逆变器输出线电压波形如图7所示,相电压波形如图8所示。
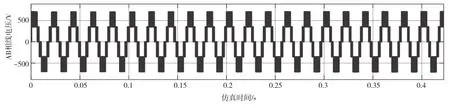
图7 逆变器输出线电压波形
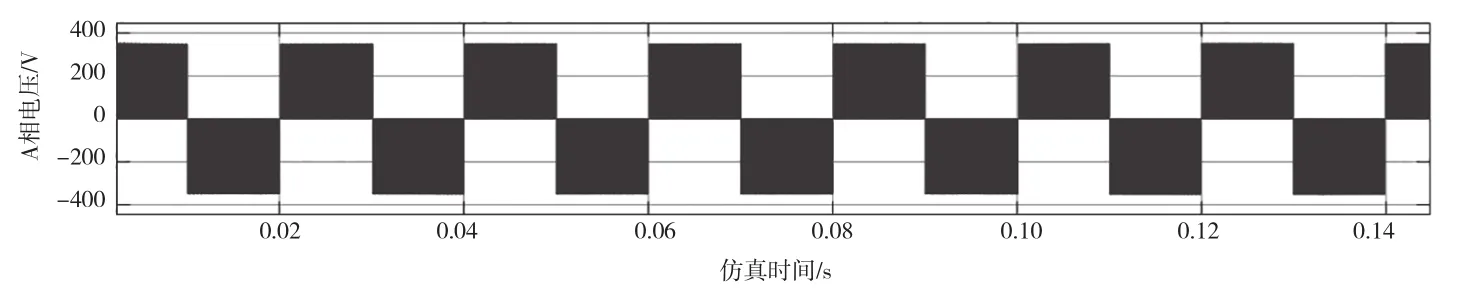
图8 逆变器输出相电压波形
图7中共有5个电平,分别为0 V、350 V、-350 V、700 V以及-700 V,图8中可以看出相电压共有3个电平,分别为-350 V、0 V以及350 V,可以看出三电平逆变器输出多电平电压更加的接近正波。
改进型SVPWM调制算法控制三电平逆变器并网输出的A相电压与电流波形如图9所示,从图中能够看出并网电压的正弦度很好。

图9 A相电压与并网电流波形
改进型SVPWM控制A相并网电流谐波畸变率和传统SVPWM控制A相并网电流谐波畸变率分别如图10和图11所示。横坐标为以50 Hz为基础频率的并网电流谐波阶次,纵坐标为各个频次所对应的谐波畸变率。在改进型SVPWM控制下的A相并网电流谐波畸变率THD为1.32%,而在传统SVPWM控制下逆变器输出的A相并网电流谐波畸变率THD为15.85%,能够明显看出在改进型SVPWM算法调制下的三电平逆变器输出的电能谐波含量更低,电能质量更高。

图10 改进型SVPWM控制A相并网电流谐波畸变率

图11 传统SVPWM控制A相并网电流谐波畸变率
5 结 论
本文分析了V2G系统中三电平逆变器的拓扑结构和工作原理,建立出三电平逆变器的数学模型,得出开关管的工作状态与输出电压之间的关系。以第一扇区为例对SVPWM控制策略进行深入的研究,引入60°坐标系法对SVPWM算法进行简化,采用基于电网电压定向的双闭环PI控制策略实现电能逆变之后的并网。最后在MATLAB环境下进行了谐波的含量的仿真,同时利用快速傅里叶变换工具对线电压和相电压进行了谐波含量的分析和仿真,通过与传统SVPWM控制逆变器的对比,验证了所提出的三电平逆变器改进型SVPWM控制算法不仅能够高效的应用到V2G系统中,而且能够有效减小并网电压的谐波畸变率,对于实现V2G系统中电动车电能高质量馈入电网方面具有积极作用。
猜你喜欢
南北桥(2022年2期)2022-05-31
一重技术(2021年5期)2022-01-18
北京航空航天大学学报(2021年9期)2021-11-02
铁道机车车辆(2021年3期)2021-07-12
科学家(2021年24期)2021-04-25
中国民航大学学报(2019年1期)2019-04-13
航空学报(2018年12期)2019-01-18
电脑知识与技术·经验技巧(2017年9期)2018-02-24
电子制作(2017年20期)2017-04-26
电子制作(2017年10期)2017-04-18