基于状态观测器的四旋翼飞行器鲁棒控制*
2020-03-27 06:37:02付兴建员乾乾王天琛
火力与指挥控制 2020年1期
付兴建,员乾乾,王天琛
(北京信息科技大学自动化学院,北京 100192)
0 引言
四旋翼飞行器,自从20 世纪中期问世以来,已经有几十年的发展历史[1-3],现如今无论是娱乐用的航模玩具,还是基于PIXHAWK 控制板的四旋翼系统所采用的控制策略大多是PID 控制。PID 控制器原理简单,易于实现,但是PID 控制的抗干扰能力差、鲁棒性弱。而四轴控制系统是一种复杂的多变量强耦合系统,加之在飞行过程中存在着各种各样的不确定因素,简单的PID 算法不能达到很好的效果。对四旋翼系统中存在不确定性情况下的稳定性问题的研究有重要的意义[4-5]。
随着科技的发展,控制系统在现实中的应用越来越广泛。状态反馈以其独特优势发挥着重要的作用,无论是系统的极点配置还是线性二次型的最优控制,利用状态反馈的方法去分析是人们最先想得到的[5]。但是,在实际四旋翼飞行器中,状态作为系统的内部变量组,有的时候不可能全部被测量,有的时候又会在经济性和适用性等方面受到限制,这就使得状态反馈的物理实现变成一件极其困难的事情。这就形成了一个比较复杂的矛盾,而解决这个矛盾的方法就是设计一个状态观测器,用观测器得到一组逼近系统状态的向量,从而得到基于状态观测器形式的输出控制器[6]。
控制系统是使得被控的模型按照预期目标运行的系统,大部分控制系统是基于反馈控制原理实现的。经典的反馈控制系统设计所需要被控对象的精确的数学模型。但是实际情况下,被控对象的动态特征很难用精确的模型去描述。大部分情况下需要进行适当的简化才能进行有效分析[7]。常用的方法就是用线性定常系统中参数模型代替实际高阶系统,这样必须引入不确定性,另外在控制系统的运行过程中,还会出现环境的变化,元器件的老化问题,因此,不确定性是普遍存在的。鲁棒控制中可以描述系统模型的不确定性信息[8-11],并估计在某些条件下,达到控制目标所留有的自由度。使得系统存在模型不确定情况下和外界干扰时,设计控制器使得相应的闭环系统具有期望的性能。本文将所提出的结论应用于四旋翼飞行器中,通过求解状态观测器和状态反馈控制器,验证了存在不确定性的四旋翼飞行器系统的稳定控制,证明了本文所提方法的有效性。
1 问题描述
考虑如下带外部扰动的不确定系统:

假设1 系统的不确定性ΔA 和ΔB 矩阵满足如下的形式

假设2 系统式(1),x0是初始状态,(A,B)是可镇定的,(A,C)是可观的。
对于系统式(1),定义如下观测器:


2 主要结果和证明
引理1[12]:已知对称矩阵
其中,则下面的条件之间能相互转换:


引理3[14]:设x,y 是适当维度的向量,则下列不等式成立


其中,


证明:选取李雅普诺夫函数

其中,P1和P2为正定矩阵。对选取的Lyapunov 函数沿着闭环系统式(1)与式(5)进行求导

根据引理3,则存在正实数a,b,c 使得下面的式子成立
可得
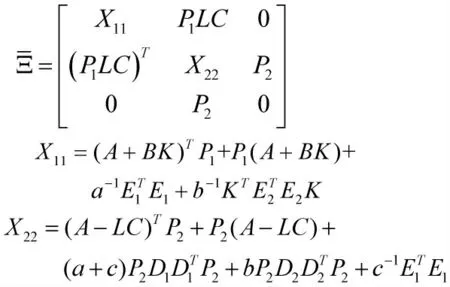
对上面式子整理变换可得:
其中
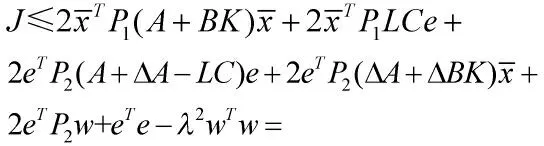
定义如下所示的性能指标


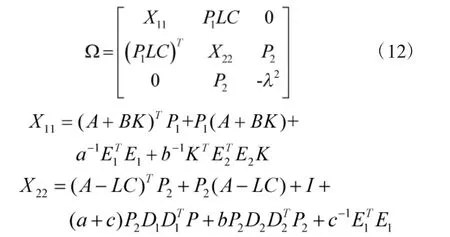
把式(10)带入可得到

其中
3 四旋翼飞行器实例仿真
以某种四旋翼飞行器为例[15],选定俯仰角、俯仰角速度、滚动角、滚动角速度、偏航角、偏航角速度为系统6 个状态,系统输入量为:前、后、左、右4个电机的电压,则状态方程参数为:
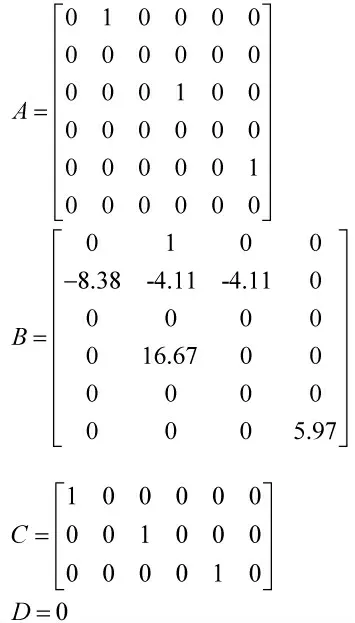
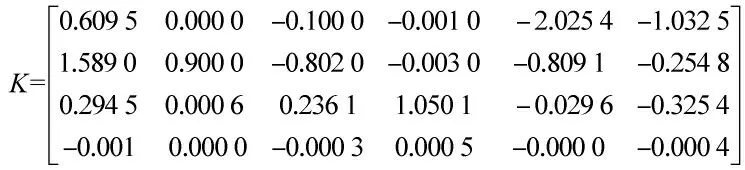
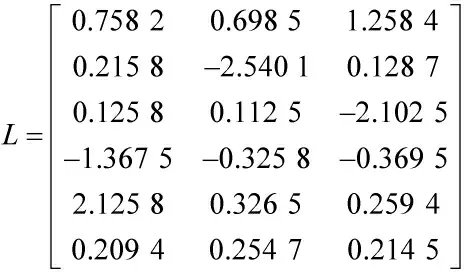
选择

根据四旋翼飞行器的状态参数,选取a=0.47,b=1.2,c=0.7。在MATLAB 中根据LMI 工具箱求解可得状态反馈增益的值。
状态响应曲线如图1~图3 所示。
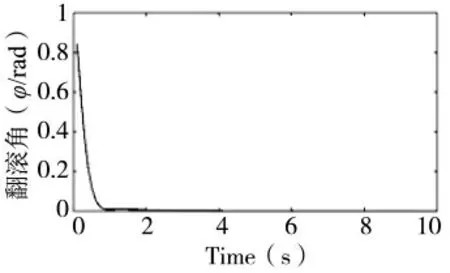
图1 翻滚角状态响应曲线
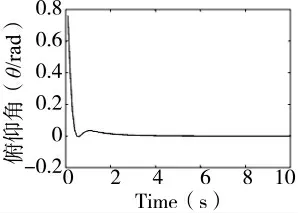
图2 俯仰角状态响应曲线
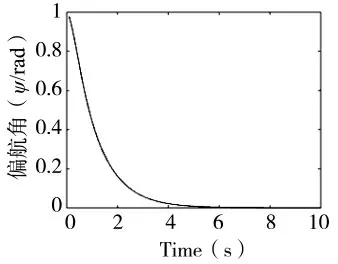
图3 偏航角状态响应曲线
从图1~图3 的状态响应曲线可看出,系统的状态在很短时间内达到稳定,从而表明设计的基于观测器的鲁棒控制器的有效性。因此,存在不确定性的四旋翼飞行器系统,在鲁棒控制作用下,在较短时间内即可达到稳定并且满足一定的性能要求。
4 结论
考虑了状态不容易测量的范数有界的不确定四旋翼飞行器系统,设计了基于状态观测器的鲁棒控制,通过推导得到鲁棒控制和状态观测器满足的不等式,通过Schur 补引理,将代数不等式转化为等价的标准的线性矩阵不等式。仿真实验证明了基于观测器的鲁棒控制器的有效性。
猜你喜欢
北京航空航天大学学报(2021年9期)2021-11-02 08:24:16
军民两用技术与产品(2021年9期)2021-03-09 05:45:28
自动化学报(2019年6期)2019-07-23 01:18:22
电子制作(2019年9期)2019-05-30 09:41:48
厦门理工学院学报(2016年1期)2016-12-01 04:50:41
北京航空航天大学学报(2016年8期)2016-11-16 01:51:09
北京航空航天大学学报(2016年7期)2016-11-16 01:51:01
系统工程与电子技术(2016年4期)2016-08-24 07:46:18
铁道科学与工程学报(2015年5期)2015-12-24 12:12:08
深空探测学报(2015年3期)2015-12-07 11:15:06