激光雷达扫描反射镜结构有限元分析*
2020-03-26 02:09:14张文博
机械研究与应用 2020年1期
张文博
(苏州旭创科技有限公司,江苏 苏州 215126)
0 引 言
激光雷达是利用特定波长的激光信号对障碍物表面进行主动式扫描来获取障碍物表面信息[1],其不易受环境光的影响,抗干扰能力强,具有良好方向性以及相干性,可以实现高精度测量,因此激光雷达技术在障碍探测以及环境重建方面具有明显的优势[2-3]。根据扫描方式类型不同,激光雷达可以分为机械旋转激光雷达、混合固态激光雷达和固态激光雷达。作为无人驾驶车障碍物探测的主要传感器,目前应用较多的是机械旋转激光雷达,对车辆周围360°环境进行扫描测量[4]。
近年来随着无人驾驶技术的迅速发展,国内外众多科研机构、公司等对此都展开了较为深入的研究。就国外而言,美国Velodyne公司开发的产品HDL-64E、HDL-32E、VLP-16分别为64线、32线及16线的360°全景激光雷达,扫描方式均为机械旋转式,即将激光器、探测器和信号处理单元作为上端运动部件进行整体旋转[5]。德国IBeo公司的LUX系列4线和8线激光雷达产品扫描方式也为机械旋转式,但旋转扫描采用一定范围扫描而非360°扫描,其激光器和探测器均设置为固定部件,旋转部件只需要采用轻质的转镜,使得光束满足一定范围内的扫描[6]。以色列Innoviz公司开发的激光雷达利用MEMS微振镜,即采用半导体生成工艺把微光反射镜与MEMS驱动器集成到单个芯片进行扫描,属于混合固态激光雷达[7]。美国Quanergy公司S3激光雷达采用了光波导相控阵激光雷达技术,通过调节发射阵列中每个发射单元的相位差改变激光的出射角度,属于固态激光雷达[8]。
国内一些科研院校和公司在激光雷达方面也有一定的研究积累。西安电子科技大学沈辰弋等人通过俯仰镜片扫描实现了空间二维扫描[9]。南京理工大学陈怀波等人基于45°转镜扫描方式提出了一种车载线阵激光雷达全新的周向扫描成像体制[10]。国防科学技术大学胡春生等人研制了一种三维高速扫描激光雷达[11]。西安理工大学蒋猛等人研究了一种机械旋转激光雷达系统实现对障碍物的水平扫描[12]。上海技术物理研究所陈育伟等人提出了一种机载用的线扫描激光雷达[13]。还有北京北科天绘、深圳速腾聚创和深圳镭神智能等企业已经量产机械旋转16线和32线激光雷达。
目前,机械旋转激光雷达根据转镜扫描方式有摆镜扫描、45°转镜扫描、双(单)面镜扫描和旋转多面镜扫描四种方式。摆镜扫描的优点是扫描效率高,但缺点是扫描幅宽窄,如果扫描角度偏大或使用双向扫描,尺寸过大,稳定性也差。45°转镜扫描的优点是扫描镜尺寸小,总视场大,但缺点是焦平面会出现像旋现象,若不消除像旋现象,则不能应用于阵列探测器。双(单)面镜扫描的优点是没有像旋,适合在线列、面阵探测器中使用,但缺点是扫描效率低。当扫描角度较大时,镜面体积庞大,当系统瞬时视场较小时,对双面镜的面平行度及面形精度有较高要求[14]。因此,本文采用的是旋转多面镜扫描方式,它的优势在于扫描范围大、扫描速度快、分辨率高且技术应用成熟。
机械旋转激光雷达是通过一定的轴系来维持整个系统的运转,扫描结构作为机械旋转激光雷达中的关键结构之一,高速旋转或受到外界冲击会直接引起测距和测角误差,故扫描结构的工作精度直接影响系统的测量精度[15],而反射镜结构的高刚强度和高稳定性直接与扫描结构的工作精度有关,故本文以激光雷达扫描反射镜为主要研究对象进行分析。
1 有限元建模
本文中激光雷达的扫描结构包括轴、反射镜、磁钢、硅钢片、轴承等,装配后的二维剖视图如图1所示,其中反射镜采用的是扫描三面棱镜,三个反射面以垂直轴为中心轴扫描,以实现扫描视场大和角度精度高等目的。为便于分析计算,硅钢片和轴承作简化处理。其中主要扫描结构具体材料参数如表1所示。
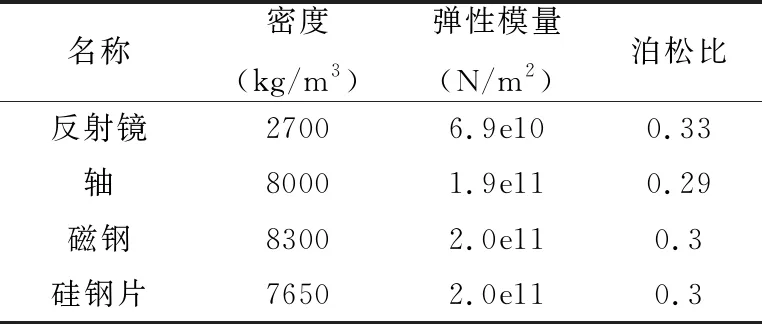
表1 扫描结构材料参数
在设定关联中心为中等、全局单元尺寸为3 mm的提前下对扫描结构进行网格划分,其中平滑设置为中等、过渡设置为缓慢,划分后的模型如图2所示,共计14 814个节点和68 428个单元。
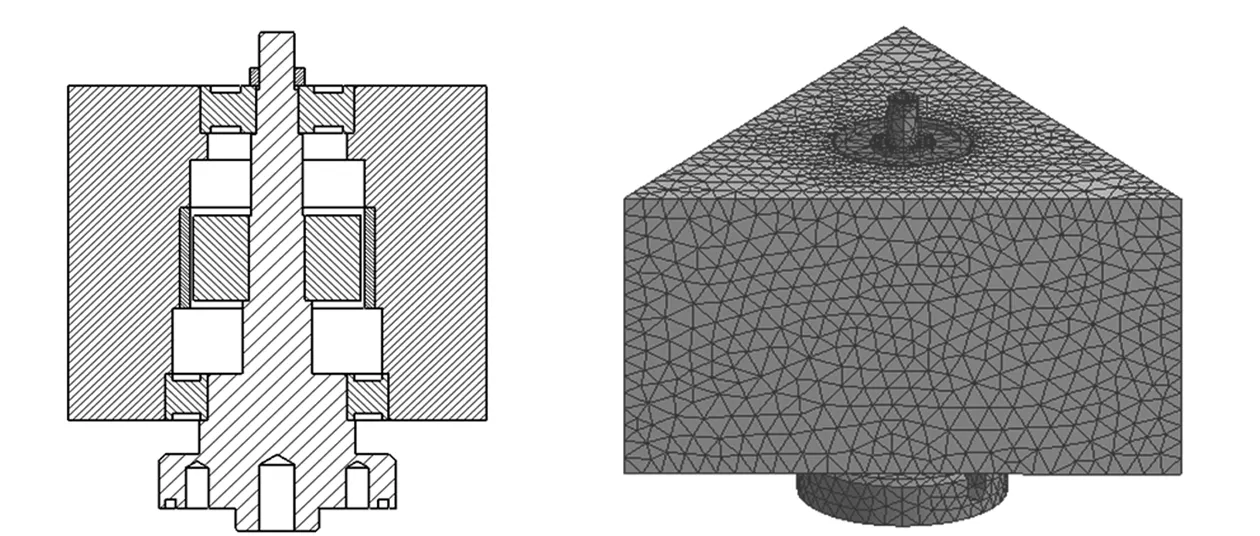
图1 二维剖视图 图2 网格模型
2 模态分析
模态分析是对扫描结构进行动力学分析的首要步骤,目的在于确定扫描结构的各阶固有频率和模态振型,是动力学分析的基础。由于求解的是扫描结构的整体模态,所以必须在ANSYS Workbench中先用接触对的方法将各个结构耦合在一起,否则求解的将是各个结构的单个模态。
由于在低阶模态下对系统的振动有较大影响,故只计算扫描结构在自由模态下前六阶固有频率,表2所示是扫描结构第一阶到第六阶固有频率。

表2 模态阶数与频率 /Hz
由于驱动电机旋转产生的振动对扫描结构来说为外界激励,最大转速3 000 r/min对应的最大转动频率为50 Hz,远小于扫描结构的第一阶固有频率1 777.2 Hz,故扫描结构不会发生共振。
3 动力学分析
ANSYS Workbench中通过定义接触对传递动力来模拟真实传动情况。轴底部对地设为固定约束,小轴承与反射镜和大轴承与反射镜间的接触类型均设置为无摩擦接触,其中反射镜相对轴设置为转动铰链,在转动铰链上加载转速为314 rad/s,加载后的有限元模型如图3所示。
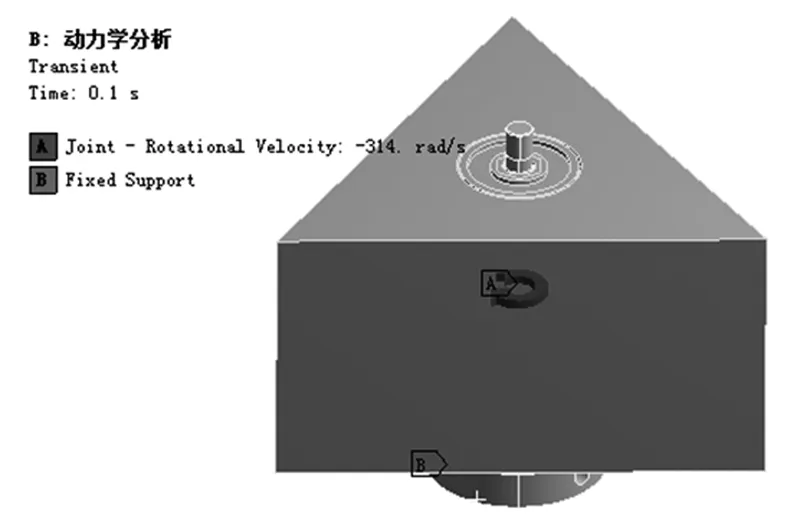
图3 加载后的有限元模型
作用时间为0.04 s,其中0~0.01 s时间段采用渐变载荷,设置子步初始步数、最小步数、最大步数分别为800、100、1 000,求解分析反射镜结构的位移和应力,提取的位移云图和应力云图分别如图4、5所示。
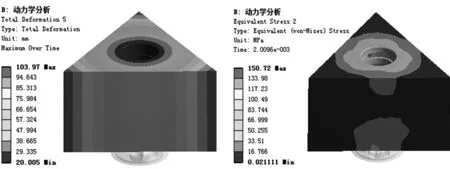
图4 位移云图 图5 应力云图
由位移云图可知,变形发生在整个反射镜上,且离轴心越远变形越大,最大位移值为103.97 mm,所以反射镜最大变形为0.05 mm(反射镜绕轴线的最大旋转半径为51.96 mm),此变形小于所允许的最大变形值0.1 mm,说明反射镜结构在工作过程中刚度是足够的。
由应力云图可知,最大应力值为150.72 MPa,位于反射镜与小轴承结合面处,应力值小于反射镜材料AL6061-T6的屈服应力值210 MPa,说明反射镜结构在工作过程中也具有足够的强度。
4 冲击分析
扫描结构需要满足一定的冲击条件,故在ANSYS workbench方向加速度公式里输入500*sin(285.6*time),即采用半正弦波冲击,其中加速度大小为500 m/s2,持续时间为11 ms,其中轴对地设为铰链约束,Z向即轴向为自由约束,提取的位移云图和应力云图分别如图6和图7所示。
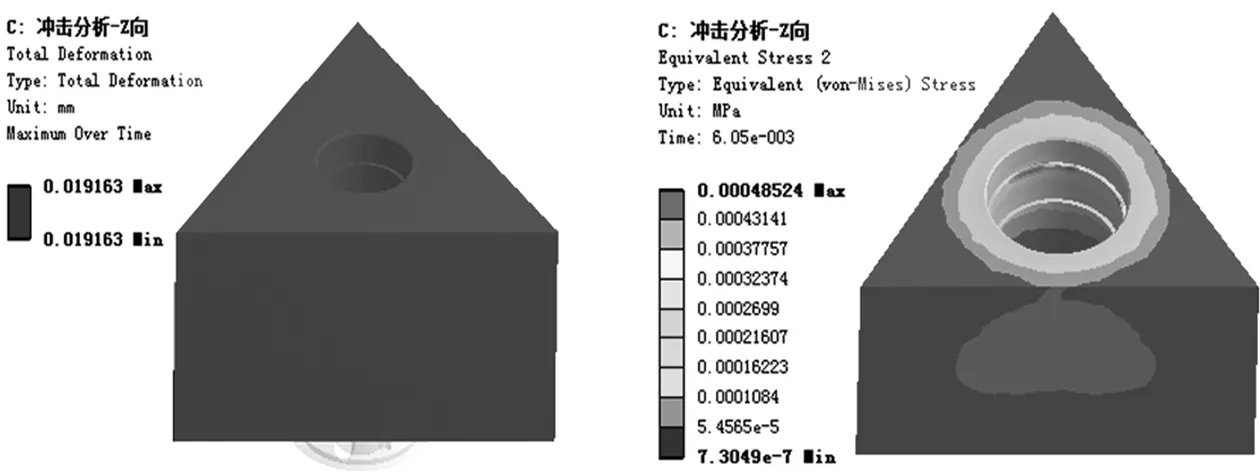
图6 位移云图 图7 应力云图
由位移云图可知,最大位移为0.019 163 mm,此值小于所允许的最大变形值0.1 mm,说明反射镜结构在冲击载荷下刚度是足够的。
由应力云图可知,最大应力为4.8524E-4 MPa,位于反射镜大轴承台阶端,远小于材料AL6061-T6的屈服应力210 MPa,说明反射镜结构在冲击载荷下也具有足够的强度。
5 结 论
(1) 通过对激光雷达扫描反射镜结构进行动力学分析得到其工作过程中的等效位移云图和等效应力云图。由位移云图可知最大变形位于反射面边缘处,而激光束照射在每个反射面发生渐晕现象的地方也在反射面边缘处,为了保证反射镜在水平方向有效的视场角,故可以适当增大反射镜的旋转半径。由应力云图可知最大应力位于反射镜与轴承结合面处,为了减小反射镜和轴承之间相对转动,延长反射镜的使用寿命,故在产品装配时需保证反射镜与轴承外圈相对固定。
(2) 冲击载荷下的有限元分析结果也表明反射镜结构具有足够的刚度和强度,说明冲击载荷引起反射镜的抖动对垂直方向上的角度分辨率没太大影响。
(3) 基于动力学和冲击分析能有效地实现对扫描反射镜在工作过程中和冲击载荷下的真实模拟,合理地获得反射镜的位移和应力分布,可指导完成反射镜结构及其系统的优化设计。
猜你喜欢
北京测绘(2022年5期)2022-11-22 06:57:43
新能源科技(2022年9期)2022-11-20 19:28:56
汽车观察(2021年8期)2021-09-01 10:12:41
环境技术(2020年1期)2020-03-06 11:41:02
中国农资(2019年44期)2019-12-03 03:10:46
中国交通信息化(2019年1期)2019-03-26 06:43:46
电子制作(2018年16期)2018-09-26 03:27:00
名家名作(2017年3期)2017-09-15 11:13:37
光学精密工程(2016年6期)2016-11-07 09:07:15
光学精密工程(2016年4期)2016-11-07 09:05:37