基于三维激光扫描技术的桥梁检测应用研究
2020-03-26 11:38骆义赵文举张建
智能建筑与智慧城市 2020年3期
骆义,赵文举,张建
(东南大学土木工程学院)
随着我国交通运输事业的蓬勃发展,我国桥梁建设已经进入了“建养并重”的可持续发展道路。与此同时,桥梁基数的增加引起桥梁养护任务越来越重。因此,在运营阶段对现役桥梁进行长期的健康监测和有效的管理养护势在必行。结构健康监测技术是提高工程结构健康安全及实现其可持续性管理的有效途径之一,利用结构健康监测技术早期发现结构损伤和隐患从而实现治小病防大病的预防性维护被寄予厚望。国内许多大型桥梁安装了监测系统并且积累了海量的监测数据[1-2]。
在结构外观病害快速智能检测方面,针对传统裂缝检测技术费工费时且效果不佳的难题,Ni等[3]开发了基于多尺度特征融合深度学习的裂缝自动勾画技术,能够实现图像中裂缝的快速实时高精度自动化勾画。Jiang Shang和Zhang Jian[4]研发了一种新型爬壁无人机平台,可快速灵活地获取结构表面细致的损伤影像,采用先进的人工智能和图像处理算法,实现了裂缝等病害的实时自动识别和快速量化分析(图1)。
在结构非接触式测量方面,基于开发的微波干涉雷达设备,Zhao等[5]首先验证了所开发设备的测试精度,并采用信号盲源分离方法进行桥梁多拉索信号分离,从而结合振动法实现多拉索索力同步识别(图2(a))。考虑图像像素之间微小变化和中小型桥梁变形程度小的特点,Yu Shanshan 和 Zhang Jian[6]提出了一种采用追踪被测结构自然特征技术的视觉方法,可实现桥梁结构挠度的快速测量(图2(b))。

图1 基于无人机平台的结构外观病害智能检测

图2 非接触式桥梁快速测试
但需指出的是,国内众多桥梁中存在着大量缺少设计和施工资料的旧桥,由于图纸、尺寸的缺少导致建模不准确难以安全准确的制定适用的监测方案。当前桥梁检测主要使用大地测量方法等传统测量方法。其主要采用光学或电子测量仪器周期而重复性地对既定测点的三维坐标进行测量,从而检测桥梁结构水平位移和垂直位移。该方法虽然精度与灵活性较高,但自动化程度与检测速度较低,测点数量受限于观测棱镜,人工作业量大而强度高,亟需发展新的检测手段。
作为一项新兴测绘技术,三维激光扫描技术(3D Laser Scanning)发展于九十年代,又称“实景复制技术”,无需反射棱镜即可快速对待测结构进行整体扫描并获得其空间坐标及表面信息,进而获得高精度的扫描点云数据。然后将测定数据构造成三维模型。三维激光扫描技术突破了传统的单点测量方法,具有高效率、高精度的独特优势。目前,国内外均已有运用三维扫描技术进行桥梁检测的研究。2011年Liu等[7]通过三维激光雷达对美国泰特公路桥进行数据采集,并运用LiBE算法测量了桥梁的质量损失。2018年KojiMatsumoto等[8]提出了一种基于三维空间测量的桥梁整体变形捕获方法,并采用三维激光扫描仪对缅甸Twantay桥进行空间信息测量。相比之下,虽然三维激光扫描技术在桥梁监测研究在我国的起步较晚,但已有部分学者也取得了不少应用成果。其中,2014年田云峰等[9]利用三维激光扫描采集的点云数据和BIM模型的对接,分析了基于三维激光扫描和BIM模型在桥梁质量管理中的可行性和必然性。2017年徐进军等[10]将地面三维激光扫描技术应用到桥梁挠度变形测量。其结合桥底面点云具体特点,采用点云拟合法和重心法分别获取不同荷载下桥梁底部的挠度变化,通过对比分析初步确定该方法变形测量精度,验证了该技术在桥梁挠度变形测量中的可行性。
本文简要介绍了三维激光扫描技术应用原理,给出了点云数据处理、结构三维建模方法以及结构几何变形测试方法。并以一实际桥梁为依托,基于三维激光扫描技术提取了该结构精确的几何尺寸信息,进一步对结构点云群数据获得了相较于单点测量更加全面的几何信息。
1 三维激光扫描技术理论与应用原理
1.1 三维激光扫描工作原理
三维激光扫描系统主要由三维激光扫描仪、计算机、电源供应系统、支架以及系统配套软件构成。三维激光扫描仪作为三维激光扫描系统的主要组成部分,其主要由激光射器、接收器、时间计数器、马达控制可旋转的滤光镜、控制电路板、微电脑、CCD机以及软件等组成,是测绘领域继GPS技术之后的一次技术革命。它突破了传统的单点测量方法,具有高效率、高精度的独特优势。三维激光扫描技术能够提供扫描物体表面的三维点云数据,因此可以用于获取高精度和高分辨率的数字地形模型。近年来,三维激光扫描仪已经由基载向机载方向发展,最具代表性的为机载三维激光雷达。可利用三维激光扫描仪共同作业,通过激光扫描测距快速、非接触、高精度地获取任意复杂场景下结构的三维立体信息,从而掌握结构全场范围的表面损伤和变形等状况。
三维激光扫描技术主要通过测距系统获取扫描仪到被测结构之间的距离,再通过测角系统获取扫描仪至被测结构的水平角和垂直角信息即可计算出物体的三维坐标。在扫描的过程中可利用设备本身的垂直和水平马达传动装置完成对结构的全方位扫描,从而实现对空间一定的取样密度进行连续扫描测量,获得被测结构的密集点云数据。根据测距原理的不同,三维激光扫描系统主要分为脉冲法、干涉相位法和三角测距法三种类型。脉冲法测距远、精度低。而干涉相位测量和三角激光测量法适用于精度高的近距离测量。考虑到市面上主要的三维激光雷达运用的是脉冲法,故本文详细介绍了脉冲法测距原理。
如图3所示,不同于大地坐标系,激光扫描系统采用内部坐标系统进行作业。其坐标系以扫描器的激光点为中心,基于右手定则进行被测结构测距定位。
对任意一个空间测点P( x ,y,z )来讲,它位于激光扫描系统三维空间坐标系中的坐标为:

式中,s为测点相对于坐标系原点之间的距离,θ和α分别为测点的水平和竖直夹角。

图3 激光扫描仪三维坐标系示意图
脉冲激光测距利用激光器对目标发射脉冲信号,通过脉冲到达目标并由目标返回到接收器的时间,从而计算出目标距离假设目标距离为s ,具体表述为:

式中,c 为光在真空中的传播速度,为光往返时间。
1.2 基于三维点云的结构轴线提取与快速建模
基于上述三维激光扫描工作原理,三维激光扫描技术通过数据点云来存储扫描信息,进而可提取结构轴线和进行快速建模。
图4给出了三维点云的轴线提取与快速建模流程。在实际工程应用中,首先对采集的结构点云数据进行降噪、抽稀以及距离采样等预处理,进而进行数据获取、处理和最终生成结构模型等系列操作。其中获取并处理数据是最关键的环节,具体又可分为:数据缩减、坐标纠正、数据滤波、分割、三角网建立、三维建模等。三维建模是三维激光扫描技术的一个重要应用,其主要根据获取的三维点云数据,经处理后提取建模所需要数据,对被测结构进行实体造型。根据结果的存储方法和处理方式具体分为点云模型、三维线框模型、以及三维表面模型和三维实体模型四种。首先基于预处理后的点云数据进行中轴线粗提取工作,然后采用最小二乘拟合法可实现被测结构轴线精确提取。

图4 被测结构轴线提取与快速建模流程图
1.3 基于三维点云的桥梁变形检测
基于三维激光扫描的桥梁变形检测实施方案如图5所示。在桥梁变形检测现场作业时,需首先对被测结构现场环境进行勘测,确定观测点后进行现场扫描。在三维激光测量变形应用领域,三维点云数据的精度始终是应重点关注的问题。提高激光扫描仪三维数据的实用性和可靠性,就必须建立完善的精度评估、误差分析方法,在此基础上减少数据误差、修正数据错误,提高数据精度,从而为三维激光扫描仪在实际工程中的可靠性提供充分的保证。引起三维激光点云误差的原因主要来自于两个方面,其一为扫描仪本身引起的误差,另一方面即为外界因素的干扰。为了减少外界误差,首先需要对点云进行滤除噪声离群点,从而使点云均匀抽稀。然后进行数据处理并通过单、多期检测数据对比得到变形量。
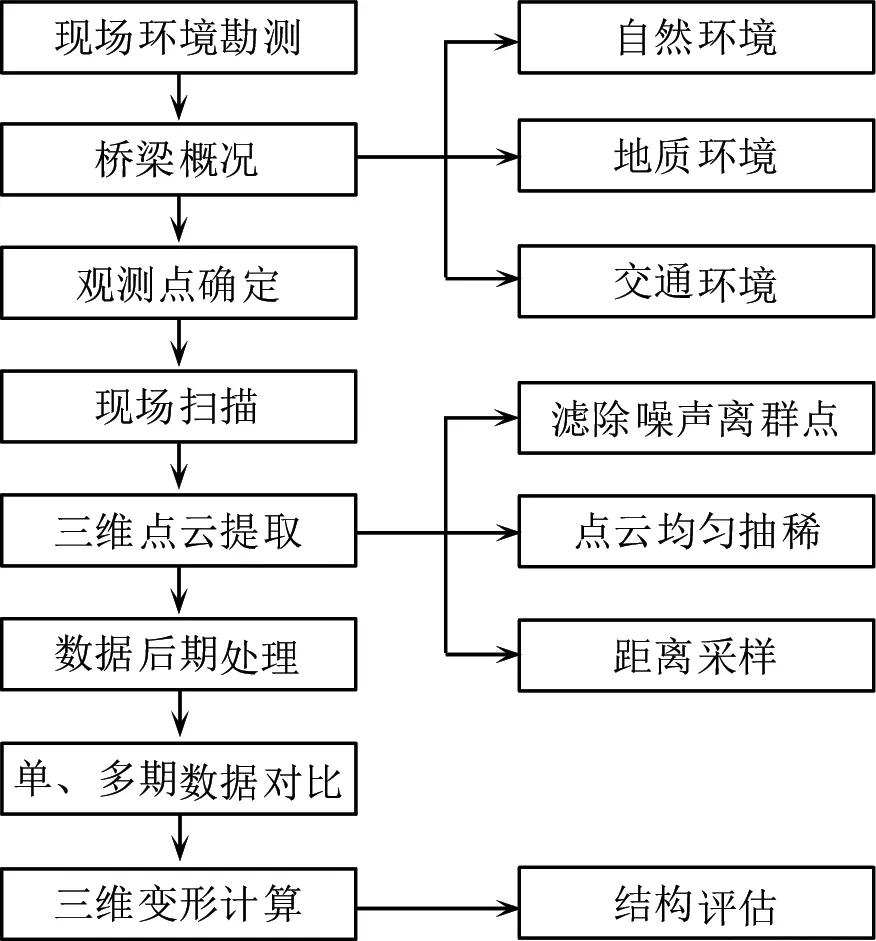
图5 基于三维激光扫描的桥梁变形检测实施方案
2 工程应用
2.1 工程概述
如图6(a)所示,高明大桥(旧桥)是广东省佛山市广(州)海(安)线西线上横跨西江的一座特大桥。于1991年11月建成通车,大桥共13跨,总长1116.2m。其中,主跨为中承式钢管混凝土拱桥,引桥为上承式钢筋混凝土肋拱桥,拱上结构主要由拱上立柱、纵梁、肋腋板和桥面组成。
如图6(b-c)所示,三维激光扫描现场作业采用地面站覆盖式扫描方式对全桥进行扫描,获取桥梁整体的三维点云信息,并依据点云数据分析桥梁几何形态,建立单期桥梁基础模型,为全桥整体长期性变形检测提供基础数据。扫描工作采用的设备为最前沿RIEGLVZ-400i型三维激光扫描仪(最大测距800m,测试精度5mm),其采用创新处理框架可实现与互联网交互的最新波形处理LiDAR技术。本次实验采用激光发射频率为1200kHz。
2.2 测试结果分析
如图7所示,扫描作业完成后对各扫描站点的点云数据进行粗拼接和精拼接处理,得到全桥的三维点云信息。全桥点云包含约23.9亿点,其中桥拱等关键位置的点云密度约为1.4万点/㎡,点云拼接精度为4.1mm。
以7#主拱为例进行分析,将其三维点云(图(8a))从全桥点云数据中分割提取,然后进行点云去噪处理形成光滑网格,可以得到该主拱的三维模型信(图(8b))。然后将该模型导出到Auto CAD软件中,提取该结构真实尺寸下的模型线型图纸(图8(c))。
通过对全桥模型进行多次扫描重建,对比多期扫描结果可以得到全桥范围内任意位置的变形情况。由于本次扫描是首次扫描,无法进行多期模型对比。因此,通过对比分析设计中几何外形一致的6#和7#主拱模型以验证多期扫描测量变形的可行性。分别对6#和7#主拱模型进行抽稀和匹配,其中选取变形相对较小的主拱底部混凝土支座为参考点,两主拱的变形情况如图9所示。研究发现,从对比云图中可以清晰地观察各位置的几何外形差别情况两主拱平均几何差异为29mm,最大位置相差41.5mm。
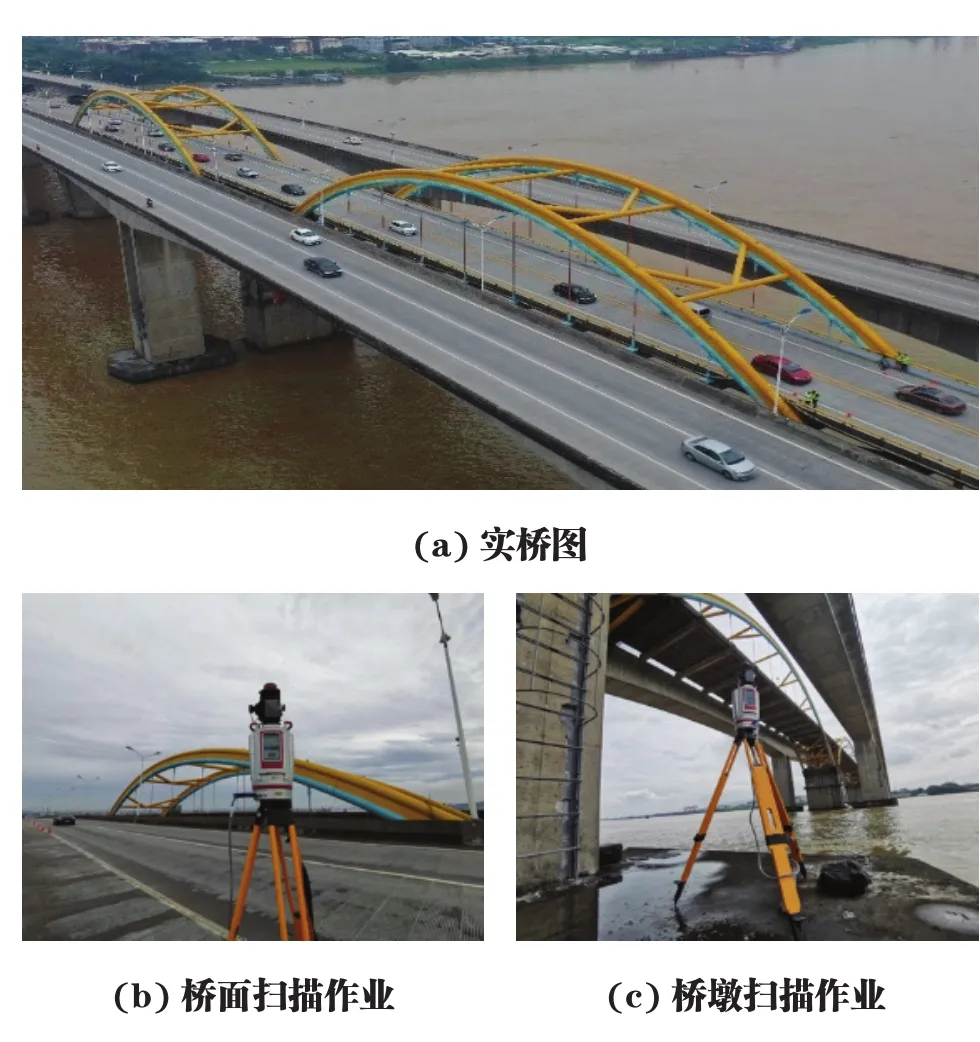
图6 高明大桥测试概况图
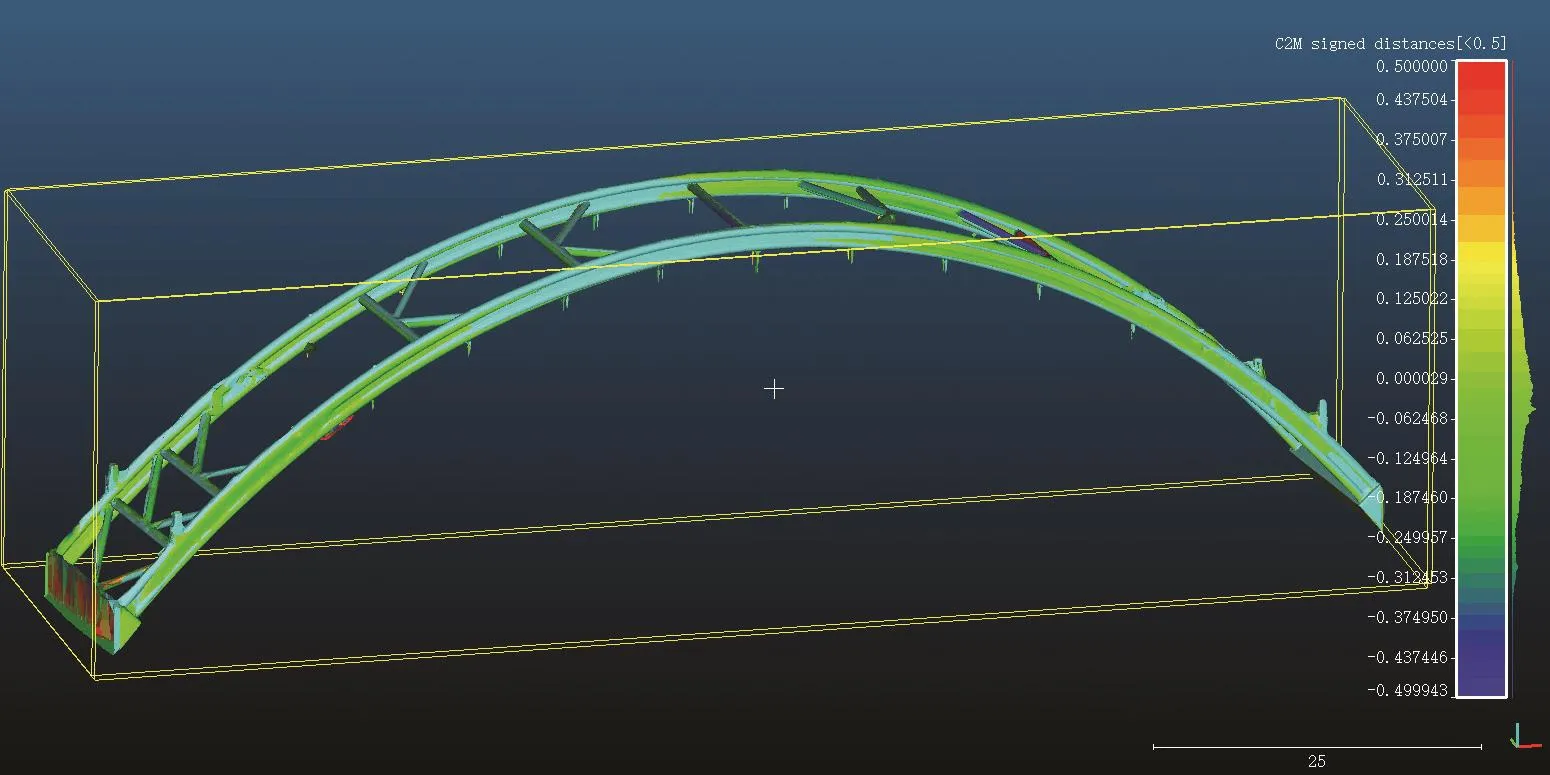
图9 被测桥梁结构6#与7#主拱几何外形对比图
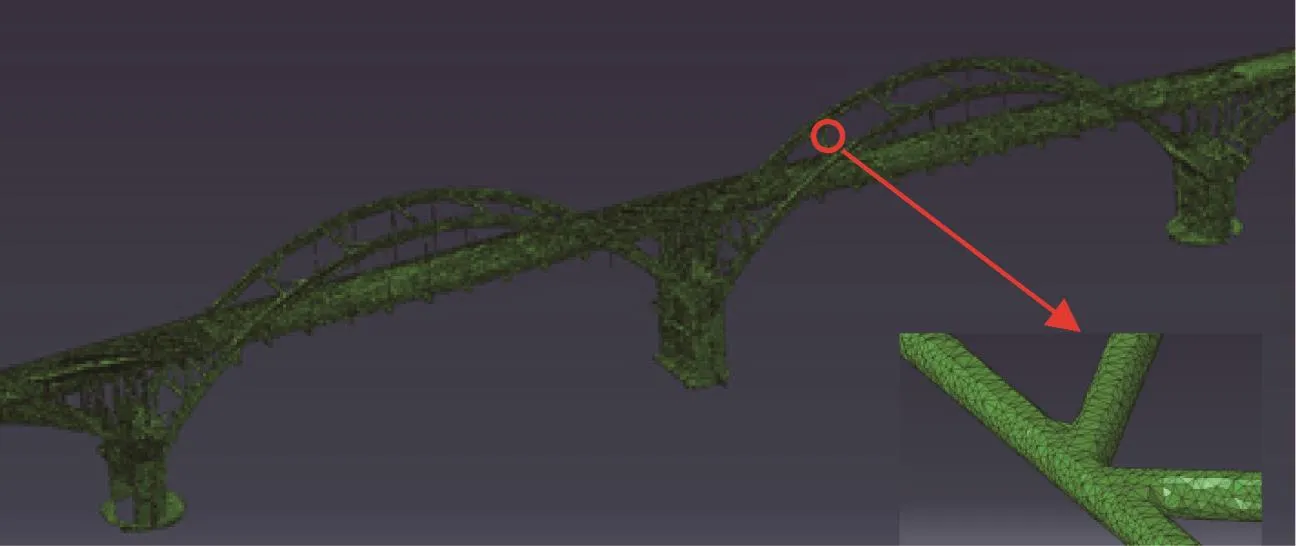
图10 有限元模型图
此外,可将毫米级桥梁三维点云模型导入有限元分析软件中进行快速有限元建模。图10给出了该测试桥梁结构三维点云模型导入有限元软件Abaqus中的模型网格划分图。通过快速建立该有限元模型,可实现在后续桥梁检测之前进行有限元分析。
3 结论
针对已建桥梁快速智能建模对于桥梁健康监测和定期养护具有重要的现实意义。本文提出了一种基于三维激光扫描技术的桥梁快速建模和几何变形测量方法。结合一实体桥梁的应用,给出了一种桥梁日常运行下的有效检测点布设方案,通过点云数据获取进行桥梁结构快速建模,并得到了桥梁两侧拱结构几何线型,有效验证了三维激光扫描技术在桥梁快速建模与检测应用中的可行性。
猜你喜欢
现代仪器与医疗(2022年2期)2022-08-11
昆明医科大学学报(2021年6期)2021-07-31
中学生数理化(高中版.高考理化)(2020年11期)2020-12-14
科学(2020年5期)2020-11-26
初中生世界·九年级(2020年2期)2020-04-10
模具制造(2019年3期)2019-06-06
小哥白尼(趣味科学)(2019年2期)2019-04-17
电子制作(2018年17期)2018-09-28
儿童故事画报·发现号趣味百科(2016年3期)2016-06-24
现代营销·经营版(2015年3期)2015-04-20