
电阻应变片在侧面碰撞中车门开启过程监控的应用研究
2020-03-26 06:19习波波商恩义李月明周大永顾鹏云
汽车零部件 2020年2期
习波波,商恩义,李月明,周大永,顾鹏云
(浙江吉利汽车研究院有限公司,浙江杭州 311228)
0 引言
在侧面碰撞测试中,保持车辆侧面结构的完整性对于保护驾乘员人员安全至关重要。其中,侧面碰撞过程中车门不得开启,否则将破坏侧面结构完整性,更严重造成驾乘人员被甩出车外,发生二次碰撞事故,导致驾乘人员发生严重伤害。因此,国内外法规及新车评价体系中,对侧面碰撞过程车门解锁及开启状态有明确规定,如GB 20071-2006、C-NCAP管理规则(2018年版)以及Euro NCAP对试验后车门解锁及开启状态都有明确规定,且其中以Euro NCAP工况较为恶劣,即侧面碰撞工况中要求各车门非落锁状态。
GB 20071-2006中明确规定:在试验过程中车门不得开启,碰撞试验后,不使用工具应能打开足够数量的车门,使乘员能正常进出;C-NCAP及Euro NCAP规定:对于两侧的每一个车门,若在碰撞过程中开启,则分别减去1分[1-4]。
目前侧面碰撞研发工况测试过程中,法规及NCAP试验,特别是针对IIHS及C-IASI等侧碰试验,由于壁障作用范围大,碰撞过程中后车门易出现开启,这将直接导致扣分或降级处理。但在侧面工况结构开发过程中,行业内并无成熟且可靠的车门开启监控测试方法,这主要由于车门内锁位置空间狭小且密闭,门锁内部运动动态过程监控困难。目前在碰撞试验过程中:监控门锁开启方法主要是通过录像观察车门开启变化时刻;其次是在左后门把手位置附近增加Y向加速度传感器,分析门把手在碰撞过程中与车辆车门车身的相对速度变化,判断门锁开启时间,门锁处属于碰撞变形区域,在此安装的加速度传感器极易损坏,试验成本较高。上述两种监控测量方法能判断出门锁开启时间,但无法监控门锁实际开启位移。
据此,本文作者研究了电阻应变片及门锁开启运动的工作原理,设计了一种既能简单方便安装在门锁内部、还能准确定量监控门锁开启位移的测量方法。即在门锁内部增加电阻应变片传感器,通过采集电阻应变片电阻变化标定门锁系统开启位移量,在实际碰撞过程中通过标定的插值公式转换成门锁实际开启的位移量,从而定量监测门内把手在碰撞过程中拉伸最大位移及相对应时刻。
1 门锁开启原因分析
为分析门锁开启原因,探究门锁在侧面碰撞运动过程中的动态过程,掌握碰撞过程中门锁系统各机构间的相对运动,对门锁开启原因进行统计分析。
如图1所示,是车辆侧面工况开发过程中车门开启原因统计分析示意图。门锁系统涉及到零部件数量较多,各部件之前运动关系较复杂。通过分析门锁开启工作原理,归纳总结门锁开启原因主要有以下方面:(1)门外板变形带动把手后移、导致连杆与玻璃导轨挤压,造成门锁开启;(2)门外板变形直接挤压到连杆机构或拉线固定端子,导致门锁拉线发生了相对运动,拉线动作导致门锁开启;(3)外把手惯性块质量过小,可平衡的惯性力过小,导致外把手拉开门锁;(4)门外板造型特征引导变形,导致把手位置变形不佳。
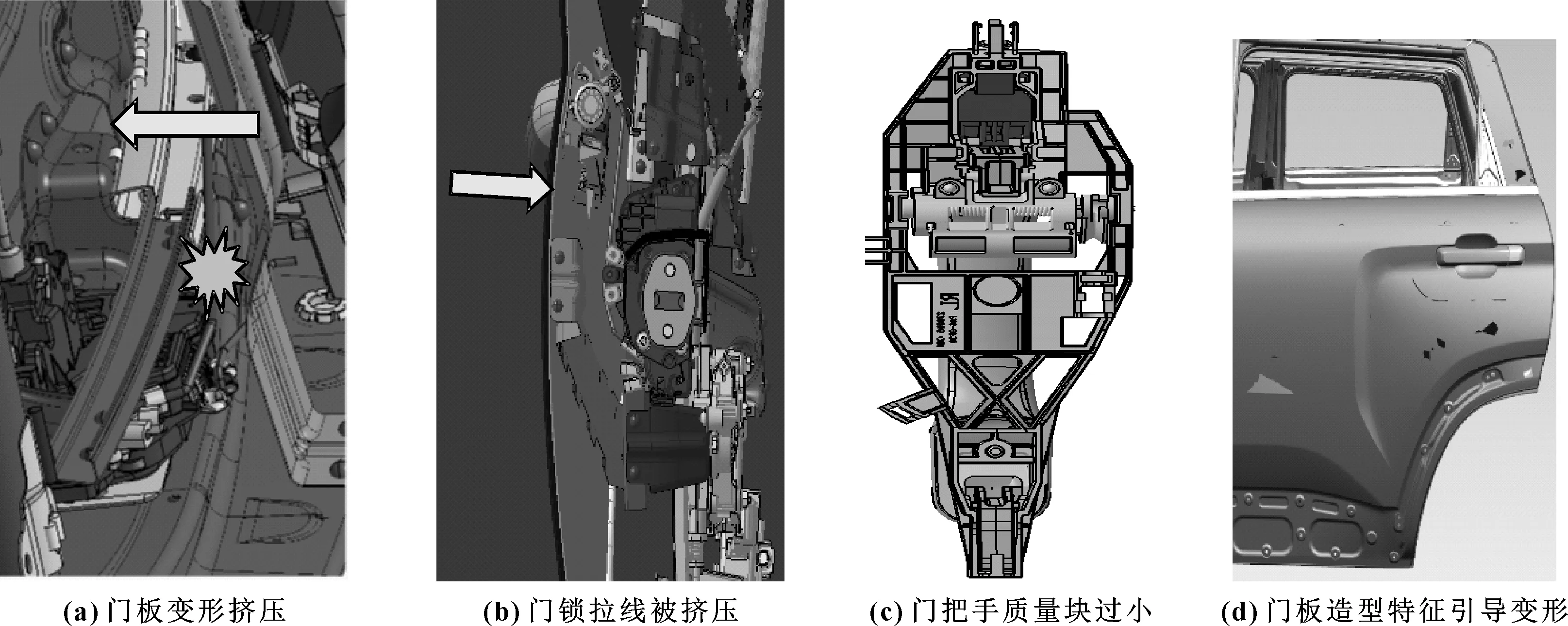
图1 车门开启原因统计分析示意
从上述门锁开启原因分析结果看,任何方式的门锁开启原因都是锁体解锁结构相对车门车身产生相对运动导致门锁开启位移达到或超过开启临界设计值,从而导致车门在碰撞过程中打开。
为研究门锁在碰撞过程中的运动位移变化过程,考虑到门锁安装位置空间狭小且密闭的特殊性,对利用电阻应变片方案监控门锁运动过程及门锁位移采集方法进行了研究。
2 电阻应变片测量原理及灵敏度系数换算
2.1 电阻应变片测量原理
在电阻应变片电路测量中,单个电阻应变片式传感器的应变片由于温度变化引起的电阻变化与弹性敏感元件的应变所造成的电阻变化几乎有相同的数量级,是误差产生的主要原因。对此,可采用热电阻补偿法。在使用单个应变片进行测量时,通常通过增加同应变片相同电阻的补偿电阻组成全桥电路进行应变采集[5]。图2所示为以某一规格常用应变片电阻值即R=350 Ω进行的电路连接示意。
在门锁产生运动位移过程中,门锁锁体通过开/关锁拉线实现锁体摇臂摆锤运动,当达到最大位移时,门锁解锁。锁体在开/关锁拉线下作摇臂运动,锁体摆臂运动带动粘有应变片的弹性钢片运动,安装在弹性钢片上的电阻应变片发生相应的电阻变化,利用电阻应变片电阻变化换算出锁体摆臂运动位移。

图2 应变片全桥连接示意
以某车型的门锁系统作为监控对象,首先根据锁体摆臂的运动行程,在锁体平整侧安装弹性钢片一端并使用热熔胶进行固定,另一端与锁体摆臂成相切状态,确保弹性钢片运动与锁体摆臂运动保持一致,具体电阻应变片系统安装结构及弹性钢片与锁体摆臂联合运动示意如图3所示。
日前,一场别开生面的“车辆驾驶技能竞赛”拉开了天业热电产业2018年职工职业技能竞赛的帷幕。在比赛现场,层层选拔出来的26名优秀选手同台竞技,展示当代“工匠风采”。

图3 电阻应变片系统安装结构及弹性钢片与锁体联合运动示意
2.2 灵敏度系数换算
电阻应变片灵敏系数是指电阻应变片在单位应变作用下所产生的电阻的相对变化量,可表示为
k=(ΔR/R)/(ΔL/L)
(1)
在数据采集系统中,为得到所需数据,需要对应变片采集的数据单位进行换算,得到需要的数据。根据式(1)可换算得到如下公式:
ΔR=k·R·(ΔL/L)
(2)
其中:k为电阻应变片的灵敏系数;R为应变片电阻值;ΔR为单位物理量引起应变片电阻变化量;应变ε=ΔL/L为形变量与原来长度尺寸的比值,则有ΔR=k·R·ε;由于数据采集系统只能对全桥电路进行信号处理,根据图2所示应变片全桥连接图,假设当外界物理量单位变化引起应变片电阻变化ΔR时,引起全桥电路电压变化为ΔV,则有:
ΔV=0.5-[R/(R+(R+ΔR))]
(3)
则通过换算后数采系统内设置的灵敏度系数为ΔV,即物理量发生单位变化时,在单位激励电压下对应得到的变化电压为ΔV。
3 试验方案验证
采集N次测量值(X1,Y1),(X2,Y2),......,(Xn,Yn)。其中X为自变量即采集的电压值,Y为因变量即锁体摆臂在水平线上的位移,采用最小二乘法线性拟合。
利用下列公式计算各标定位置锁体摆臂在水平线上标定位移Yn,单位为mm:
Yn=Xn·m+b
(4)
式中:Xn为变量;m为标定系数,mm/V;b为截距,mm。
根据最小二乘法来判定数据的最佳拟合,在Excel中可利用函数LINEST来获得现有数据的最佳拟合直线,通过LINEST函数可以求解截距b及标定系数m。数据的离散程度决定了LINEST函数计算直线的精确度,数据越接近线性,LINEST模型就越精确。 LINEST函数使用最小二乘法来判定数据的最佳拟合[6]。
根据上述标定方法,对某车型的门锁锁体摆臂的水平位移进行标定,以一定间隔分别采集4次测量值,通过线性拟合得到式(5),具体标定数值及结果如图4所示。
Y=6.89X+47.74
(5)
根据换算后的系数,对某车型在GB20071-2006 50 km/h侧面碰撞试验中左后门锁锁体摆臂在水平线上的位移进行换算,得到如图5所示的锁体摆臂在水平线上的位移与时间对应曲线。

图4 锁体摆臂水平线位移标定数值及结果 图5 门锁锁体摆臂在水平线上的位移
通过采集换算后的数据,内门把手开/关锁拉线位移约在24 s处位移变化值达到最大为24.5 mm,该门锁系统设计开启位移临界设计值最大变化量为15 mm,因此在碰撞过程中门锁系统开启位移超过开启临界设计值,导致车门在碰撞过程中打开,与试验后实际检查结果相符。
4 结束语
研究了电阻应变片传感器在车辆侧面碰撞过程中监控车门开启的应用,对电阻应变片传感器的工作原理、灵敏系数换算及位移计算进行了详细分析及研究。总结出以下内容:(1)侧面碰撞过程中,车门开启主要原因是锁体在外部作用力下,开/关锁拉线拉动锁体摆臂达到门锁解锁要求的行程导致解锁发生。(2)利用应变片传感器采集及安装的便利性,将应变片与门锁机构运动结合,实现对门锁机构运动的定量分析。(3)在侧面碰撞过程中,利用电阻应变片监控车门锁体摆臂在水平线上的运动,可直观得到门锁系统在碰撞过程中的运动位移及突变时刻。试验结果表明:该方法效果显著,且使用成本低,具有较高的工程应用价值。
猜你喜欢
汽车电器(2021年8期)2021-08-24
汽车电器(2021年7期)2021-08-04
汽车实用技术(2021年6期)2021-04-07
少儿画王(3-6岁)(2021年6期)2021-01-13
科学与财富(2019年23期)2019-10-21
工业设计(2019年1期)2019-06-11
智富时代(2019年2期)2019-04-18
智富时代(2019年2期)2019-04-18
农民致富之友(2018年21期)2018-12-27
今古传奇·故事版(2017年8期)2017-05-19
