
基于体育辅助训练器速度调节控制系统的研究与分析*
2020-03-25 00:55苟小平张万军张景轩张景怡张景妍
甘肃科技 2020年24期
苟小平 ,张万军 ,张 峰 ,张景轩 ,张景怡 ,张景妍
(1.陇东学院,甘肃 庆阳 745000;2.甘肃泽德电子技术有限公司,甘肃 天水 741003;3.兰州工业化设备有限公司,甘肃 兰州 730050)
体育辅助训练器速度调节对系统的动态特性和更快的响应速度有着更高的要求,运动员在攀爬过程中存在着许多不确定因素,传统的控制策略的单闭环负反馈控制系统调速效果不理想。体育锻炼辅助机器人在国外已经研究了几十年,到目前为止已经推出了许多商用的移动产品[1-3]。
文章所研究的辅助机器人[4]的驱动部件[5-8]核心是无刷直流电机,能够满足上下建筑的通用功能,具有较低的成本和较高的性价比。无刷直流电机常用的速度控制方法有PID 控制[9-10]、交叉耦合控制[11-12]、模糊控制、最优控制[13]等。甘肃泽德电子技术有限公司的教授级高工、高级经济师、博士张万军研究了一些模型辨识控制系统[14-22体育锻炼辅助机器人。
文章给出了一种基于体育辅助训练器速度调节控制的算法,建立了一种基于体育辅助训练器速度调节的控制系统,利用MATLAB 进行仿真。仿真结果表明:辅助训练器的测试曲线与辅助训练器的实际基本上相一致,更稳定,舒适度更高,误差更小,精度更高,符合辅助训练实际教学和体育锻炼的要求。在陇东学院体育学院实验取得良好的效果;同时,在其他的地方体育的教学和训练具有较强的借鉴意义。
2 体育辅助训练器的结构特点
电机、一个传动减速装置和两个连接到爬楼传动减速装置的连杆小轮组成,其核心是一个无刷直流电机。为了简化研究模型,假设电机的三相绕组是完全对称的,不考虑涡流和磁滞损耗。其核心是一个无刷直流电机。为了简化研究模型,假设电机的三相绕组是完全对称的,不考虑涡流和磁滞损耗。定子绕组产生的电子转矩:

ia,ib,ic:表示为定子绕组相电流;ea,eb,ec:表示为定子绕组相电动势。得到公式(2):无刷直流电机电磁转矩公式、电磁转矩和电流幅值为可控转矩,方波电流需要电角差,并得到运动方程。

式(2),(3)中:
Te——电磁转矩;
Tl——负载转矩;
B——阻尼系数;
ω——电机转动惯量;
J——电机转动惯量。
式(3)中,Tt为系统的负载转矩,J 为系统的转动惯量,Kt为转矩系数,Kr为阻尼系数,ω 为机械角速度。
3 体育辅助训练器速度调节控制系统
无刷直流电机转速单闭环负反馈控制可以保证系统在稳态条件下无静差,但不能根据需要控制电机的电流或转矩动态过程,主要用于动态特性较低的场合。体育辅助训练器的驱动部件的控制系统结构图,如图1 所示。
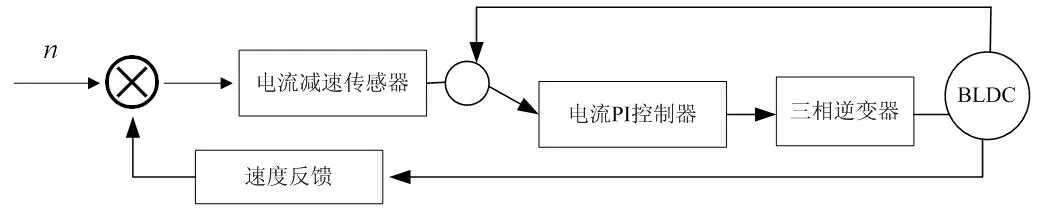
图1 体育辅助训练器的驱动部件的控制系统结构图
4 仿真结果与实验分析
在本实验中,电机的额定转速为3000rmin。减速比为1:150 后,车轮的预期转速为20rmin。体育辅助训练器的总重量约为50kg,乘员的重量设定为80kg。质量之和约为130kg,重力G 为130N,连杆支撑点到体育辅助训练器重心垂直线的水平距离d约为0.1m,因此,在本次模拟试验中,无人乘坐时,电机的负载扭矩约为0.33N·m,负载扭矩为乘坐时的电机约为0.87N·m。
4.1 MATLAB 仿真
一种基于体育辅助训练器速度调节的控制系统,利用MATLAB 进行仿真。MATLAB 仿真图,如图2 所示。

图2 MATLAB 仿真图
4.2 辅助训练器的测试曲线与实际曲线的比较
辅助训练器的测试曲线与实际曲线的比较图,如图3~6 所示。

图3 测试曲线与实际曲线的比较图1
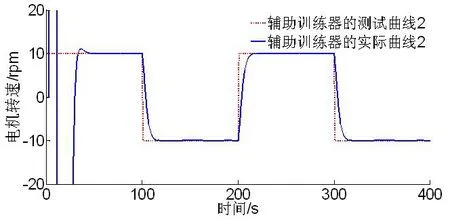
图4 测试曲线与实际曲线的比较图2
辅助训练器的测试曲线与辅助训练器的实际曲线基本上相一致,符合辅助训练实际教学和体育锻炼的要求,在陇东学院体育学院实验取得良好的效果;同时,在其他的地方体育的教学和训练具有较强的借鉴意义。
由图3~6 可知,其仿真结果表明:辅助训练器的测试曲线与辅助训练器的实际基本上相一致,更稳定,舒适度更高,误差更小,精度更高,符合辅助训练实际教学和体育锻炼的要求。
4.2 实际测试实验
实验在陇东学院体育由苟小平副教授进行实验,实验数据的分析由甘肃省泽德电子技术有限公司的教授级高级工程师、高级经济师、博士张万军进行对照实验。辅助训练器实际测试的照片,如图7所示。
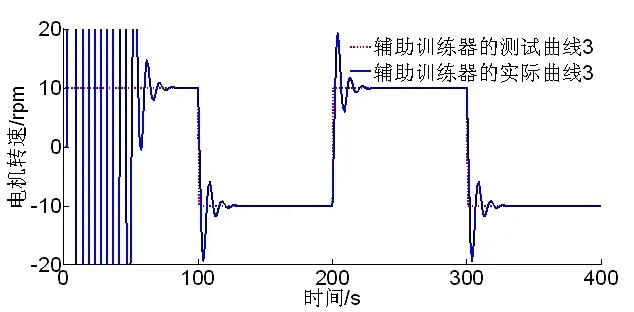
图5 测试曲线与实际曲线的比较图3
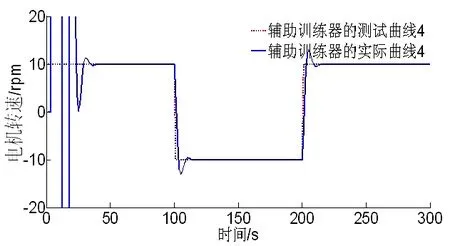
图6 测试曲线与实际曲线的比较图4

图7 辅助训练器实际测试的照片
辅助训练器的测试与辅助训练器的实际检测基本上相一致,更稳定,舒适度更高,符合辅助训练实际教学和体育锻炼的要求。
5 结论
1)本文给出了一种基于体育辅助训练器速度调节控制的算法,建立了一种基于体育辅助训练器速度调节的控制系统,利用MATLAB 进行仿真。仿真结果表明:辅助训练器的测试曲线与辅助训练器的实际基本上相一致,更稳定,舒适度更高,误差更小,精度更高,符合辅助训练实际教学和体育锻炼的要求。
2)在陇东学院体育学院实验取得良好的效果;同时,在其他的地方体育的教学和训练具有较强的借鉴意义。
猜你喜欢
大电机技术(2022年5期)2022-11-17
电机与控制学报(2022年6期)2022-07-15
汽车实用技术(2022年12期)2022-07-05
机械设计与制造(2022年5期)2022-05-19
防爆电机(2022年2期)2022-04-26
装备制造技术(2020年1期)2020-12-25
商情(2019年37期)2019-08-21
电子制作(2017年1期)2017-05-17
电子制作(2016年1期)2016-11-07
通信电源技术(2016年1期)2016-04-16
