
钻井过程人员异常行为视频智能识别系统
2020-03-25 07:51王文正吴德松李千登
安全、健康和环境 2020年2期
王文正,吴德松,李千登
(中国石化青岛安全工程研究院,山东青岛 266071)
0 引言
随着国家能源战略要求的进一步提高,油气开发行业将迎来新一轮的高峰期,而钻井作业安全也又一次成为社会关注的焦点。作业人员异常行为会对钻井安全带来极大影响。统计表明,近年来发生的井喷、物体打击、机械伤害等钻井过程安全事故中,87%是由于人员异常操作行为引发的[1-2]。如何有效控制人员异常行为已经成为了钻井现场安全管理的关键制约点。视频监控系统是目前较为常用的行为监控手段,但已有监控系统主要依靠人工观看的方式来进行问题排查和事后回溯,存在负载过大、人员易于疲惫出错、误报、漏报、报警反应时间长等问题。
为了利用视频监控设备更加及时、准确地获得监管信息,视频智能识别技术已成为国内外关注的热点[3-5]。目前采用的视频智能识别技术对于人员异常行为进行实时检测报警已在煤矿安全、公共安全等不同领域取得了一定的研究与应用成果[6-7]。董观利等[8]设计了矿井行人越界检测系统,能够对于运动的行人目标进行主动安全监测;贾澎涛等[9]对Camshift算法进行改进,提出了煤矿井下视频多目标轨迹跟踪算法,提高了检测与识别的准确性;华斌等[10]从人群的加速度角度对可能导致公共安全事故的人群异常行为进行研究,提出了一种公共场所人群加速度异常检测系统,实现了对于人群逃散、人群聚集、人群拥挤和人群逆行等4种异常行为的检测报警。然而在钻井安全管控领域尚未见到相关的研究与应用。
针对上述问题,根据钻井现场的实际应用需求,设计并实现了一种钻井过程人员异常行为视频智能识别系统,建立了井控坐岗监测、起下钻作业、甩钻具作业等不同场景下人员异常行为的识别规则,为规范钻井现场安全管理、提升作业安全水平提供了基础和依据。
1 系统概述
1.1 钻井过程典型异常行为特征分析
井喷事故是钻井过程中危害后果最严重的事故。由于地下流体存在的高压、高含硫等特点,井喷事故一旦发生,将会造成大量人员伤亡和巨大财产损失,产生极为严重的社会影响。通过对于56起重大钻井井喷事故数据分析表明,引发事故的直接原因中,井控坐岗制度未落实、未及时准确发现溢流占比最高,达到11.18%[2]。
物体打击、机械伤害等高危作业事故是钻井过程中最常见的事故类型。该类事故虽然引发人员伤亡相较于井喷事故较小,但其发生频率极高。通过对某石油企业近5年钻井过程高危作业事故统计发现,起下钻、拆装作业等环节涉及高危设备和复杂操作流程,是事故多发环节,而人员错误站位是引发事故的主要原因。
因此,选取井控坐岗监测场景下人员离岗行为、起下钻和甩钻具作业场景下人员错误站位行为作为异常行为识别的主要对象开展分析研究。
1.2 异常行为智能识别系统设计
钻井人员异常行为智能识别系统是基于钻井井场已部署好的摄像头,集中式获取钻井作业现场实时视频流,选择性设定观测区域及算法,基于目标几何和统计特征进行图像分割,在复杂场景中对目标进行检测识别、跟踪,实现目标及特征的自动提取,将目标数据在视频图像上直观标示,并输出目标及特征数据。依据目标特征及异常行为判定模型,采用深度学习算法,实现异常行为判定,并输出相应报警信息。后台管理端接收前端各类报警信息,综合生成现场的安全信息,并可进一步执行信息的浏览、异常行为处理等任务。视频智能识别系统工作流程如图1所示。

图1 视频智能识别工作流程
2 系统实现
2.1 建立钻井过程典型异常行为特征识别规则
结合钻井作业操作规程,针对井控坐岗监测场景下人员离岗、起下钻和甩钻具作业场景下人员错误站位等异常行为,提取其特征识别规则,详见表1。
2.2 供试数据
试验视频采用西南地区某石油工程公司A井场作业视频,采集于2017年11月30日至2018年5月1日,共计100段视频,每段视频时长为20~40 min。对选出视频进行处理,获得300段测试视频(每段长约20 s左右)和约10 000幅人员图像作为训练数据,并从其中随机选出10段视频、2 000幅作为测试数据,训练数据与测试数据不重复。
2.3 算法建立
2.3.1场景特点与需求分析
提出人员离岗、起下钻和甩钻具作业场景下人员错误站位等场景,存在以下特点:①监控区域属于危险区域,且人员在监控区域内频繁进出的行为较为频繁,因此所采用的算法必须能够快速检测人员目标,并进行位置判断,要求运算时间不能太长;②视频场景复杂,光照、设备运动等都会对于视频分析结果产生影响,容易导致误检。
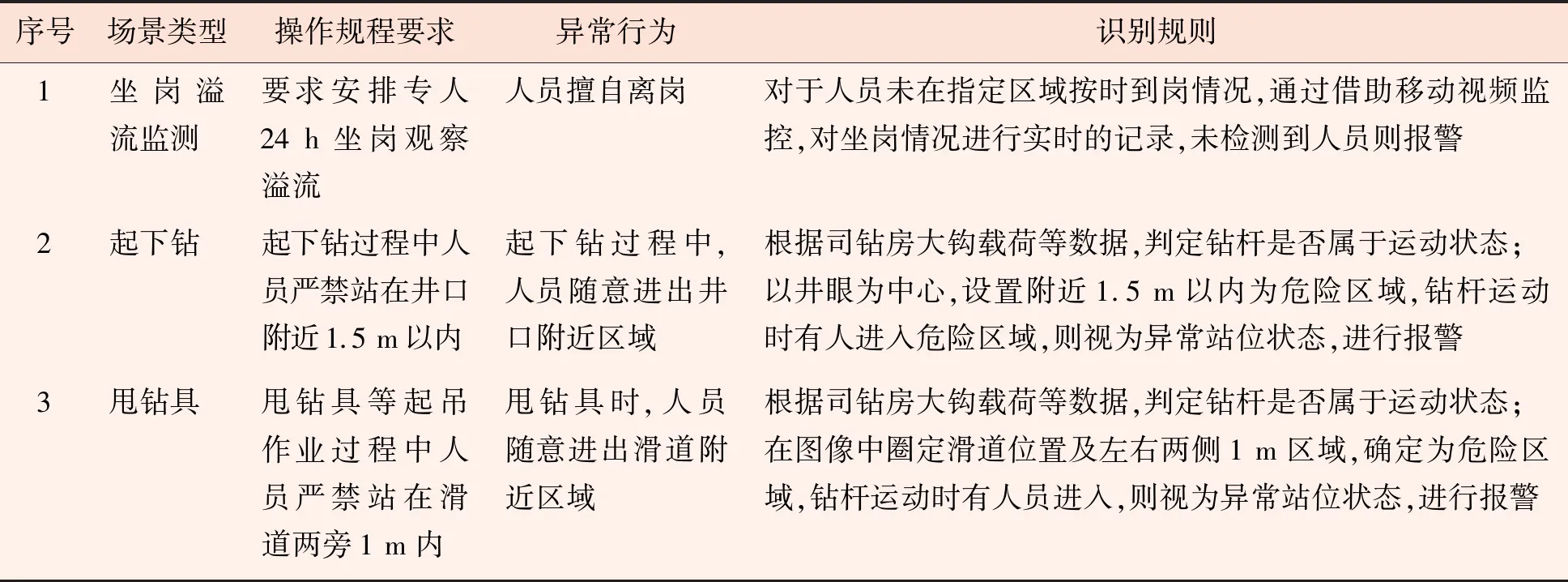
表1 不同钻井作业场景下异常行为特征及识别规则
2.3.2算法改进
为保证识别速度,采用基于卷积神经网络的目标检测方法[11]。AlexNet网络模型共有8层,其中前5层为卷积层,后3层为全连接层,如图2所示。在一定的准确率损失下,通过近似和简化AlexNet网络,加速AlexNet计算,网络模型的修改优化如下:
缩小原输入图像的尺寸,第1个conv层(conv1)输入图像大小由224×224调整为179×179,以尽量降低计算损耗,三维卷积核大小为11×11×3,步长为4;经卷积操作后,得到两个55×55大小的图像,通道数为48,最大池化后得到两个27×27,通道数为128的图像,输入第2个conv层(conv2);第3个conv层(conv3)通过只使用单通道,即不再使用图2中黄色线框内的通道,以降低GPU资源占用,通过卷积操作,得到13×13的图像,通道数为192;第4个conv层(conv4)再经过3×3卷积操作,同时对图像进行填充,得到与上一层相同尺寸和通道的图像;第5个conv层(conv5)再次卷积和填充操作后,得到13×13大小的图像,通道数为128。最后,经第1个full-connected层(fc6)、第2个full-connected层(fc7)、第3个full-connected层(fc8)共3层全连接后,得到752维特征向量的输出,以达到降低过拟合的目的,修改后的模型大大提高了计算效率。

图2 缩减后的AlexNet结构
为了增强实际场景模型中的抗干扰能力,针对在原始数据集上训练得到的初始模型进行反复迭代,采用基于强化学习的困难样本筛选策略,从而极大地增加了正样本数据集的特征多样性,保证模型在不同环境下的鲁棒性。
此外,由于SIFT方法具有尺度不变特性,而在改变旋转角度、图像亮度或拍摄视角,依然能够得到较好的检测效果,符合钻井现场野外情况多变的特点[12]。因此,为了保证识别准确率,通过引入了SIFT方法,将SIFT方法得到的关键点的方向参
数作为卷积神经网络的输入,以提高增强算法的细节提取能力,减少误检。
2.4 测试结果分析
将SIFT方法与已公开的Faster R-CNN/Refined CNN方法进行比较,结果如表2所示,在像素分辨率1 920×1 080的情况下,整体识别准确率达到85.7%,平均速度为135 ms/帧,相较于Faster R-CNN/Refined CNN方法高约3%,运算速度提高约3倍。

表2 不同计算方法测试结果对比
3 应用效果及分析
为测试检测效果,选取A井场进行了实地部署与测试。该系统部署于公司机房,通过千兆或万兆网卡接入监控视频网络,监控网络中的监控资源通过GB/T 28181-2011《安全防范视频监控联网系统信息传输、交换、控制板术要求》与系统对接,实时码流直接进入设备进行在线解析。
图3为作业现场视频部署情况,摄像头1位于队部顶端,可监控钻台前方滑道、管架附近区域。摄像头2位于振动筛附近,用于监控井控坐岗监测情况。摄像头3位于司钻房顶端,用于监控钻台上井口附近区域。其中,摄像头1、3为固定摄像头,摄像头2为移动摄像头。
3.1 坐岗溢流监测异常行为识别
坐岗溢流监测人员行为检测中固定摄像头的分辨率设置为1 080 P,帧率设置为25帧/s,结果如图4所示。图中泥浆液面观测区域为设置的检测区,如黄色框线所示,坐岗人员则用蓝色识别框表示。图4(a)表示人员在岗时,系统能够准确识别出检测区的目标人员;图4(b)则表示人员做出擅自离岗行为时,系统会自动发现目标区域内目标人员缺失,进而显示“Absence”的状态信息,并向后台发送报警信息。
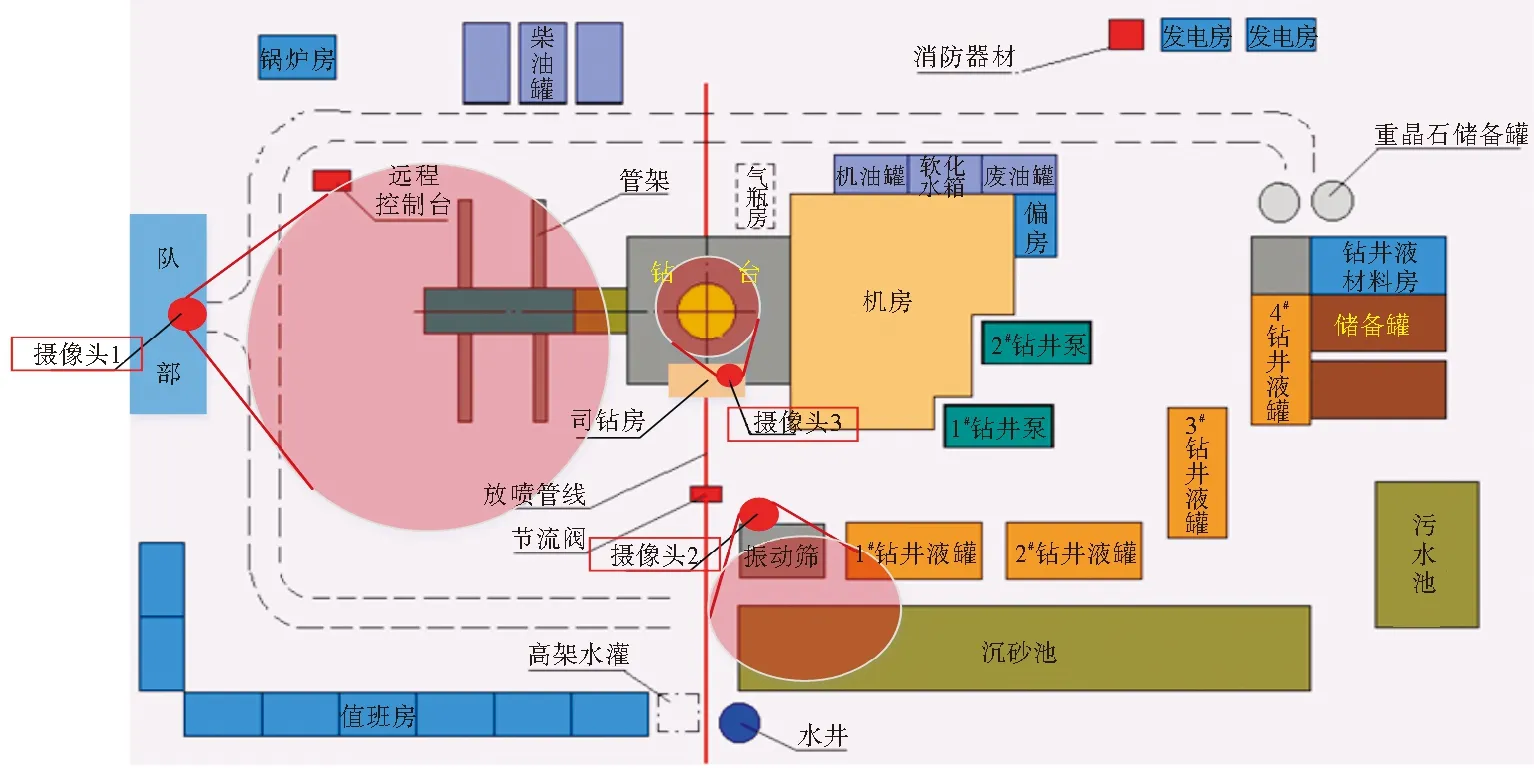
图3 钻井作业现场摄像头部署分布情况

图4 坐岗溢流监测场景下异常行为识别情况
3.2 起下钻作业异常行为识别
起下钻作业过程人员行为检测中固定摄像头的分辨率设置为1 080 P,帧率设置为25帧/s,结果如图5所示。图中井眼附近约1.5 m的区域为设置的检测区,如绿色框线所示,坐岗人员则用蓝色识别框表示。图5(a)表示钻柱上提时,系统能够通过采集司钻台大钩载荷数据,判断出钻柱处于运动状态,并通过“Moving”字串显示钻柱运动信息,同时系统并未在检测区内检测到目标人员,故无异常状态示警;图5(b)表示同样在钻柱上提时,系统判断出钻柱处于运动状态,并在检测区域内检测到目标人员,则系统会显示“Alarm”的状态信息,并向后台发送报警信息;图5(c)表示系统通过大钩载荷判断钻柱处于静止状态时,会通过“NoMove”字串显示钻柱信息,此时虽然系统在检测区内检测到目标人员,但并不会进行报警。
可以看出,采用司钻房数据与视频智能识别分析相结合的方式,能够有效避免了由于颜色过暗、标志不明显以及视频背景同类物体多、干扰大等原因所导致的钻柱运动状态难以准确识别的问题,能够简便、准确的确定钻柱运动状态,提高了算法后台处理速度,降低了误报率。
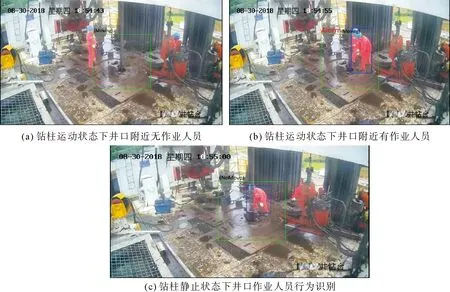
图5 起下钻作业场景下人员异常行为识别情况
3.3 甩钻具作业异常行为识别
甩钻具作业过程人员行为检测中固定摄像头分辨率设置为1 080 P,帧率设置为25帧/s。图中平板滑道附近约1 m的区域为设置的检测区,如绿色框线所示,坐岗人员则用蓝色识别框表示。与起下钻作业过程人员行为识别方法相同,同样采用司钻房数据与视频智能识别分析相结合的方式。如图6所示,钻柱起吊时,系统通过采集司钻台数据,判断出钻柱处于运动状态,同时系统在检测区内检测到目标人员,则系统会显示“Alarm”的状态信息,并向后台发送报警信息。
该系统已经在某公司井场部署,并实际运行了近4个月。目前,该系统能够保证正常解码视频流,并运行人员行为检测相关算法,系统检测画面显示正常、连续、实时。通过井场实地在线运行,充分证明了该系统的可行性。

图6 甩钻具钻作业场景下人员异常行为识别情况
4 结论
a) 深入分析钻井作业现场特点,在基于卷积神经网络的目标检测方法的基础上,引入SIFT方法和基于强化学习的困难样本筛选策略,提高了算法识别的准确率与鲁棒性。测试结果表明,在像素分辨率1 920×1 080的情况下,该方法整体识别准确率达到85%以上,平均识别速度为135 ms/帧。
b) 试点井场应用结果表明,该系统能够对接入的视频流进行实时检测,准确识别出坐岗人员擅自离岗、起下钻及甩钻具过程人员危险站位等异常行为,所采用的司钻房数据与视频智能识别分析相结合的方式有效提高了系统处理速度,降低了误报率。该系统能够有效减少人工值守工作量,避免了监控遗漏,提升了井场风险研判、预警及应急处置能力。
猜你喜欢
化工管理(2022年14期)2022-12-02
中国交通信息化(2022年9期)2022-10-28
汽车工程师(2021年12期)2022-01-18
北京航空航天大学学报(2021年9期)2021-11-02
电子制作(2019年13期)2020-01-14
电子制作(2019年11期)2019-07-04
北京航空航天大学学报(2018年1期)2018-04-20
新民周刊(2017年11期)2017-04-05
中国水运(2015年5期)2015-07-13
汽车维修与保养(2015年8期)2015-04-17
