
大型喷杆运动模拟器设计与田间工况复现试验
2020-03-24 06:47崔龙飞薛新宇丁素明乐飞翔
江苏大学学报(自然科学版) 2020年1期
崔龙飞, 薛新宇, 丁素明, 乐飞翔, 顾 伟
(农业农村部 南京农业机械化研究所, 江苏 南京 210014)
喷杆喷雾机广泛用于喷洒化学农药进行作物保护,近年来随着世界人口的增加,对粮食产量的需求越来越大,为了提高作业效率,喷杆的喷幅从最初的12 m增加到了50 m以上,大部分自走式喷雾机作业速度提高到了4 m·s-1以上,药箱容量也增大到5 000 L以上,喷杆田间作业时要求每亩地以指定的剂量均匀喷洒,喷雾机行驶过程中,源自土壤路面不平整导致喷杆产生滚转、横摆、俯仰及往复振荡等有害运动.大量的研究[1-6]指出喷杆有害运动直接导致雾滴的沉积分布不均匀,致使“重喷”和“漏喷”现象发生,使得沉积分布变异系数在0~800%变化(理想的分布为100%),同时缩短了机具寿命,降低驾驶员的舒适性.对喷雾分布均匀性影响较大的主要是喷杆竖直面内的滚转运动,如图1所示.
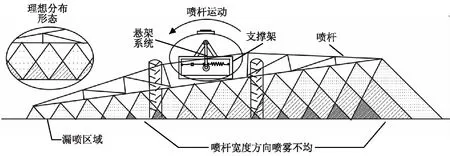
图1 喷杆运动对雾滴分布的影响
随着喷杆振动问题的日益突出,喷杆的结构设计逐步从静态向动态发展,许多喷杆上都配备了减振悬架系统,起初喷杆及其悬架系统的动力学特性大都使用数学建模的方法来描述[7-8],然而复杂的模型难以直接求解和应用,必须先进行验证或者标定;文献[9]在田间对27 m的自走式喷雾机进行了喷杆运动和末梢加速度的测量,但是受到外界条件的制约,试验可重复性差;文献[10]使用了混合建模的方法进行喷杆悬架的建模和自平衡控制器设计,综合了六自由度运动试验台扫频测试和数学模型优势,是一种研究现代机械动力学较为适当的方法.
运动状态的室内模拟可以使所有试验按照统一条件进行重复与对比,不受天气条件的影响,大大缩短了研发周期.文献[11]研制了首个用于农机振动研究的六自由度运动平台,负载质量500 kg,可以实现频率1.0 Hz(幅值100 mm)到频率10.0 Hz(幅值1 mm)的运动复现;此外,文献[12]还设计了重载农用车辆低功率激振试验台,用于研究轮胎路面的耦合动力学,提高驾驶舒适性和机具的性能[12].德国联邦农业和林业生物研究中心(BBA)建立了六自由度的液压伺服振动试验台,用于研究田间运动状态下喷杆的喷雾分布均匀性[13].利用运动模拟平台进行喷雾机田间工况复现,还可以准确测量系统的喷杆动力学特性,无论对喷杆运动被动控制、主动控制研究,还是对喷臂结构优化都具有重要意义.
文中根据前期开展的农田激励谱测试和喷雾机工作状态下喷杆振动研究[14-17],对大型喷杆适用的运动模拟平台进行设计,首先确定试验台的性能指标(最大负载、幅值、频率),通过MATLAB和ADAMS建模与仿真,分析Stewart并联机构运动学和动力学特性,校验设计参数的合理性.为了测试动平台对目标信号的跟踪精度,文中选用正弦信号、正弦扫频信号、田间实测信号3种信号进行复现,验证复现精度.
1 基于Stewart机构的运动平台设计
1.1 技术要求
通过对国内外大型喷杆喷雾机哈迪(Hardi Commander系列与Alpha系列)、阿玛松(AMAZONE, Pantera系列)、约翰迪尔(John deer4630等)、马佐蒂(MazzottiMAF5240等)、中农丰茂植保机械等公司的主流喷杆喷雾机开展调研和测试[14-17],喷杆都采用了轻量化设计,质量通常小于1 500 kg,臂展长度多数在18~36 m,在田间作业过程中喷雾机车架的振幅在±0.3 m以内,喷雾机底盘的侧倾角、俯仰角、偏航角在±5°以内.根据前期开展的农田地面不平度测量与分析[16],地面传递来的激励经过轮胎、底盘减振器的衰减,实际到车体的有效激励在10.0 Hz以内[18-20].驾驶员处于坐姿时的自身固有频率约为5.0 Hz,欧盟及国际上已经建立了相关标准对农机具的振动进行评价[21].综上所述,初步确定六自由度平台的主要技术指标:试件的最大质量2 000 kg,长度30 m,转动惯量4.5×105kg·m2,工作频宽0.01~35.00 Hz,纵向、侧向、垂向3个方向平动范围±0.30 m,平动加速度范围±9.8 m·s-2,滚转、俯仰、偏航3个方向转动范围±10°,角加速度范围±180(°)·s-2.为了方便测试时喷杆的安装,避免喷臂触碰地面,上平台的安装平面半径大于2 m,平台的中位高度大于2.65 m.
1.2 运动模拟平台的运动学与动力学描述
为了满足自由度多、负载大的使用需要,模拟平台使用Stewart并联机构[22],并联机构运动学分析主要是得到各支链运动输入与动平台运动输出之间的映射关系,首先在并联六自由度机构的基平台和动平台上分别建立坐标系O1X1Y1Z1和O2X2Y2Z2,如图2所示,基坐标系坐标原点O1位于下铰点外接圆圆心,Z1轴垂直底面向下,X1轴位于底面,垂直下铰点B1和B2的连线,Y1轴方向可由右手法则确定.建立在动平台上的动坐标系O2X2Y2Z2,其坐标原点位于上铰点外接圆圆心O2,Z2轴垂直于运动平台向下,X2轴垂直于上铰点P1和P2的连线,同理X2轴方向可由右手法则确定.
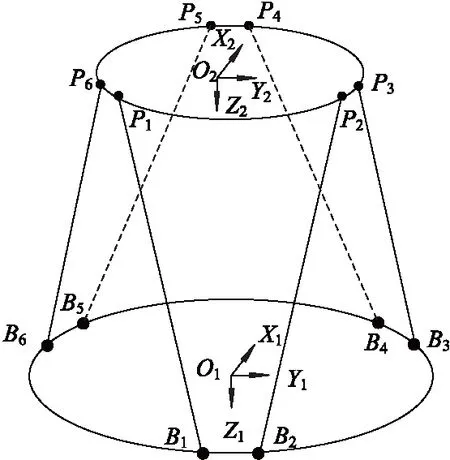
图2 六自由度并联机构及坐标系
动坐标系原点O2在基坐标系中的位置矢量表示为P=[xyz]T,动坐标系相对于基坐标系转动的3个独立转角滚转角、俯仰角、横摆角分别表示为ψx,ψy,ψz,则固联在动平台上的动坐标系O2X2Y2Z2在基坐标系O1X1Y1Z1中的广义位姿可表示为
Xp=[xyzψxψyψz],
(1)
Xp即并联六自由度机构动平台末端在工作空间的表示.

(2)
式中:T为动坐标系到惯性坐标系的旋转变换矩阵,可表示为[24]
(3)
式中:sψ,cψ分别表示sinψ与cosψ.
因此驱动杆的方向矢量可表示为
qi=pi-bi.
(4)
六自由度机构在关节空间的矢量q即可表示为
(5)
利用上式得到其在关节空间的表示,这就是并联六自由度机构的运动学逆解,反之己知6个支腿长度如何求解平台位姿即六自由度平台的位姿正解,并联机构运动学正解的难度较大,通过Newton-Raphson数值法获得并联六自由度机构的运动学正解.记并联六自由度机构的运动学反解运算为[24]
q=IK(Xp),
(6)
相应地,记并联六自由度机构的运动学正解为
Xp=FX(q).
(7)
1.3 运动平台构型参数确定
根据上述动力学与运动学方程,在MATLAB软件中建立Stewart并联机构参数化仿真模型,进行运动学与动力学解算,根据设计指标中动平台的运动范围,经过反复迭代计算,检验是否存在干涉、奇异性等问题,并结合以往六自由度平台设计经验公式[24],对构型参数进行不断调整,确定6UPU并联机构的构型参数:上铰圆直径,3.80 m;下铰圆直径,5.50 m;中位高度,2.80 m;上平台铰链偏置角,6.20°;下平台铰链偏置角,4.35°,偏置角表示该铰链偏离120°等分线的角度,取绝对值.
六自由度试验台的动平台可达空间是试验室厂房布置和设备安装的重要依据,Stewart平台的可达空间是6个驱动杆所能达到的工作子空间的交集,受到驱动杆长度和驱动杆间干涉的制约.文中采用边界数值搜索法来求解本平台工作空间,将平台工作空间看成是由无数个离散的点所组成,每个点对应一个位姿,对于每个特定的动平台位姿,通过运动学反解均可计算出6根驱动杆的向量形式,判断是否满足约束条件,只要不满足其中一个条件,这个点就不存在,反之,这个点就处于工作空间.在MATLAB中编程计算工作空间,如图3所示.
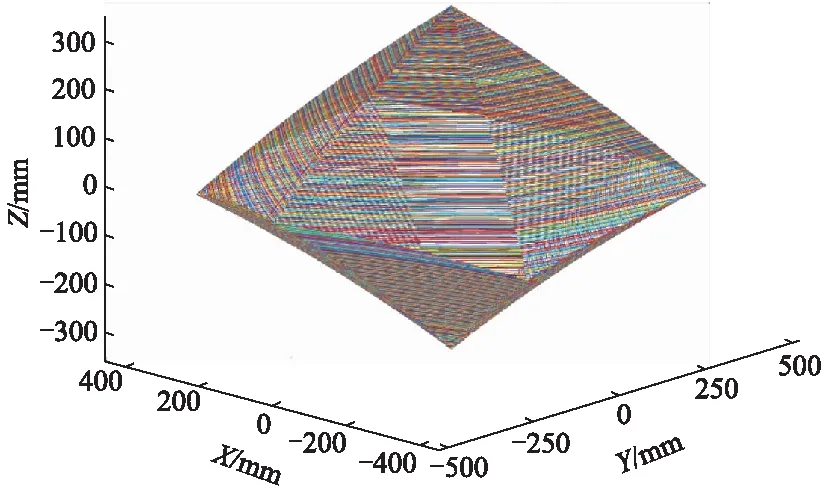
图3 动平台可达空间
为了验证数值搜索法的准确性,在多体动力学仿真软件ADAMS中建立六自由度平台虚拟样机模型如图4所示,进行运动学正解分析,计算出平台的最大位移和最大角位移如表1所示,可知铰链座的空间位置和驱动腿长度均满足动平台线位移和角位移的要求.
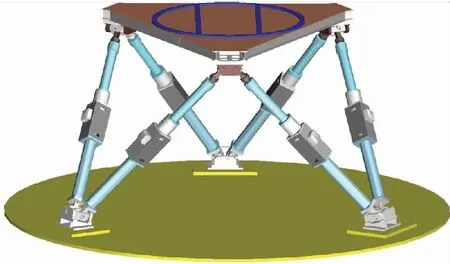
图4 虚拟样机模型
表1 动平台运动空间
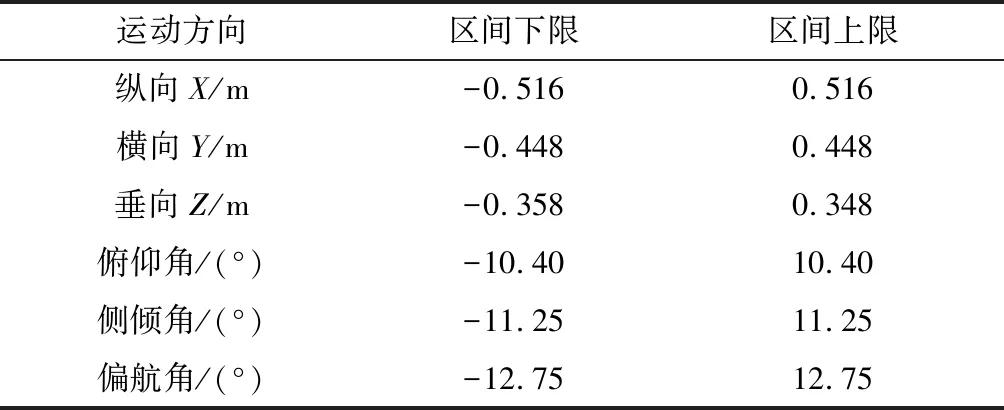
运动方向区间下限区间上限纵向X/m-0.5160.516横向Y/m-0.4480.448垂向Z/m-0.3580.348俯仰角/(°)-10.4010.40侧倾角/(°)-11.2511.25偏航角/(°)-12.7512.75
1.4 动力元件选型
根据动平台和试验对象的总质量、转动惯量及动平台的最大线速度、最大线加速度、最大角速度、最大角加速度等设计指标,按照正弦规律运动时,计算对应的运动幅值和频率,如表2所示,4种工况在ADAMS中进行全系统动力学逆解,得到电动缸最大推力和最大缸速,作为交流伺服电机和丝杠的选型依据.通过4种极限工况仿真得到电动缸峰值速度为0.39 m·s-1;峰值推力为41 436 N.
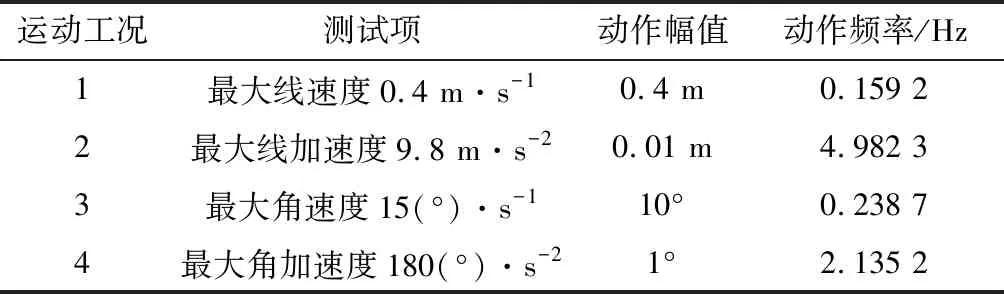
表2 4种极限测试工况
六自由度运动平台的执行器由伺服驱动器、伺服电机、电动缸组成,交流伺服电动机选用意大利PHASE公司U310F型永磁同步无刷伺服电动机,额定转速3 000 r·min-1,额定功率27 kW,转矩86 N·m,伺服电动机上安装了永磁制动器,具有失去刹车保护功能;伺服驱动器选用PHASEAXMⅡ35型;位置传感器选用海德汉ECN413型绝对值编码器,精度为1 024线·转-1;电动缸选用THK公司HBN型的滚珠丝杠,丝杠直径40 mm,缸筒外径150 mm,缸内杆直径80 mm,丝杠导程10 mm,有效行程550 mm,传动效率90%.由电动机额定转速、转矩和导程可计算出电动缸额度速度0.5 m·s-1,额定推力43.74 kN,峰值推力56.86 kN(按照电动机额定扭矩的1.3倍计算).
2 运动模拟平台控制系统
平台控制采用分布式控制方式,控制系统主要硬件由主控计算机、测试计算机、伺服驱动器、交流伺服电机、旋转编码器、数据输入/输出板卡等组成.测试计算机实现对整个系统状态监控等,主控计算机主要实现指令下达、运动解算、实时控制等功能.当用户输入给定位姿指令时,控制电动缸进行规律性的伸缩运动.
2.1 控制策略
六自由度运动平台采用基于铰接空间的控制策略,假设6个支腿间相互独立、不存在耦合,依靠6-UPU并联机构间的运动学关系,将平台期望位姿经过运动学逆解后,求得6个驱动腿目标位置,对每个驱动腿进行独立的控制器设计.控制器采用増益控制型模糊PID算法[25],电动缸的PMSM伺服系统采用电流环、速度环、位置环三闭环控制,系统对电流环的控制要求是定、转子电流能够快速、准确跟踪矢量控制指令,以便能够使用惯性环节替代定转子电压方程,从而实现矢量控制;系统速度环控制要求速度脉动率小、频率响应快、调速范围宽,电流环、速度环均采用比例控制.
2.2 控制系统软硬件
六自由度运动平台伺服控制原理如图5所示,计算机控制系统是运动控制系统的核心,选用德国西门子公司的SIMATIC847工控机作为主控计算机,与模拟量输出卡(研华PCI-1723)、开关量输入/输出(研华PCI-1750)、脉冲计数器(研华PCI-1780U)等工控板卡构成闭环控制系统.主控计算机通过模拟量输出卡向伺服驱动器发出电压指令,伺服电动机旋转,并带动滚珠丝杠转动,滚珠丝杠与滚珠螺母配合,将旋转运动变换为缸筒的直线运动,6个丝杠按控制器设定的方式运动,从而实现平台的运动控制.同时,伺服电动机的运动信息通过绝对值编码器及脉冲计数器反馈至主控计算机和测试计算机,主控计算机将脉冲数据转换为缸筒的位移量,形成闭环控制,测试计算机则进行运动学正解实时显示和输出动平台的位姿.
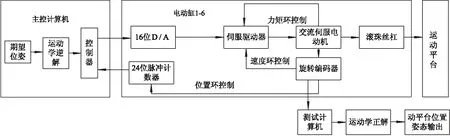
图5 六自由度运动平台伺服控制原理图
3 试验测试
3.1 六自由度平台与测试装置
Stewart六自由度运动平台如图6a所示.
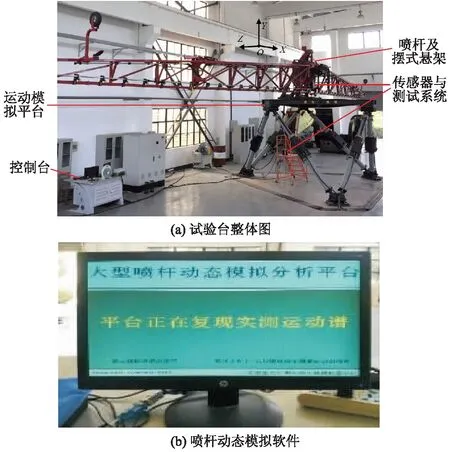
图6 大型喷杆运动模拟分析平台
本次测试对象为图6a中的28 m桁架式喷杆及其摆式悬架[25-26],带有弹簧、阻尼的摆式被动悬架,喷臂采用四面体桁架结构,喷杆质量926 kg,绕摆动中心的转动惯量32 700 kg·m2.通过安装夹具将悬架支座固定于Stewart六自由度运动模拟平台上,以动平台的运动模拟喷雾机底盘的晃动.喷杆动态模拟分析软件用户界面如图6b所示,测试计算机上显示并记录动平台的位姿信号.
3.2 系统控制性能评价指标
3.3 试验及结果分析
轨迹跟踪性能是并联六自由度机构的重要性能指标,为尽可能准确地反映六自由度平台伺服系统在各种运行条件下对目标的跟踪性能,试验过程中选用了3种参考信号进行测试,分别是正弦信号、正弦扫频信号、田间实测信号.
3.3.1正弦运动模拟
对喷雾分布均匀性影响最大的是喷杆竖直面内的滚转运动,摆式悬架的设计主要是抑制喷杆滚转运动,对喷臂疲劳寿命影响最大的是竖直方向的振动.由于喷杆被动悬架具有对于输入激励起到低通滤波器的作用[30],试验时主要考察低频激励对悬架性能的影响.
设置Stewart运动模拟平台按正弦信号输出滚转运动、垂向运动,模拟路面不平引起的喷雾机底盘低频扰动,测试结果如图7a和图8a所示,滚转方向输入频率为0.1 Hz,幅值5°的正弦信号时,系统达到稳态以后,动平台的均方根误差0.127 3°,最大误差0.191 3°;当输入频率为10.0 Hz,幅值为0.045°的正弦信号时,动平台的均方根误差为0.003 3°,最大误差0.009 2°.
垂直方向正弦信号跟踪结果如图7b和图8b所示,系统达到稳态以后,0.1 Hz幅值200 mm正弦信号输入时,动平台的均方根误差5.22 mm,最大误差7.34 mm;当输入频率10.0 Hz,幅值2.5 mm的正弦信号时,动平台的均方根误差0.21 mm,最大误差0.19 mm.
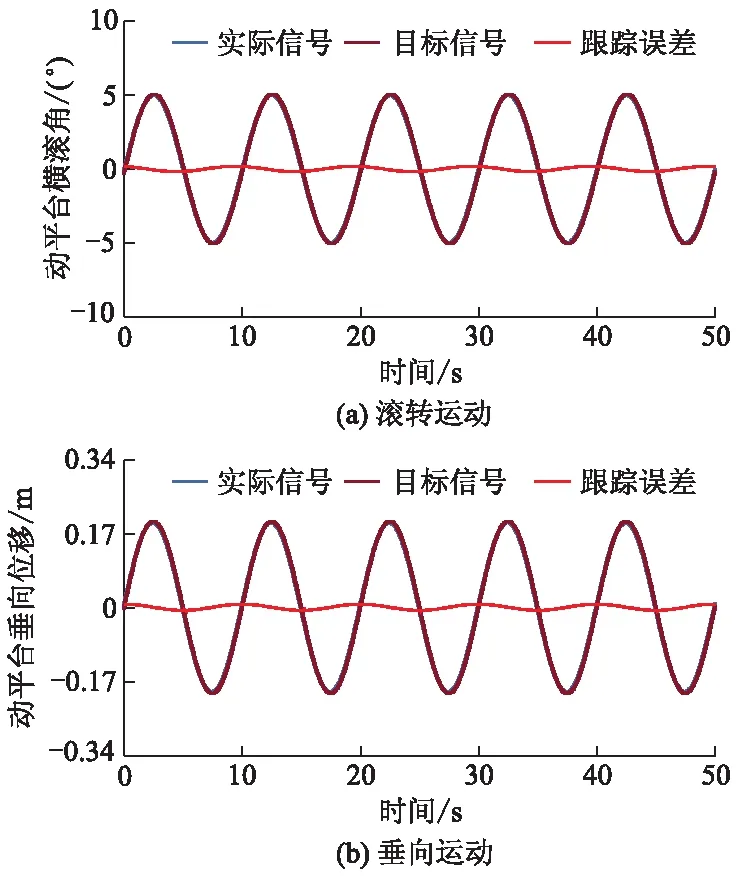
图7 0.1 Hz正弦信号跟踪试验
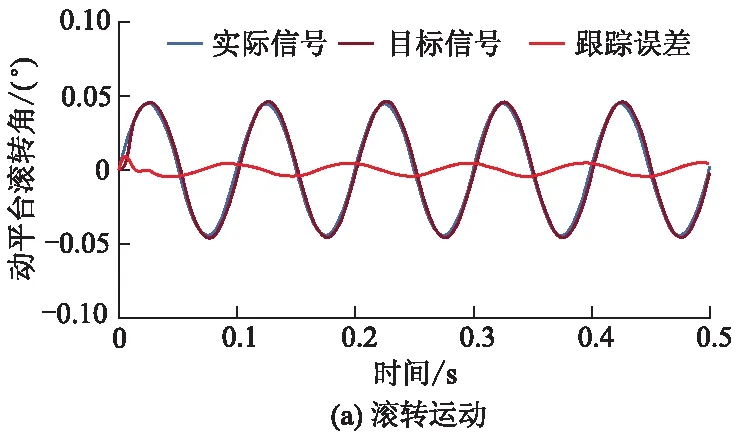
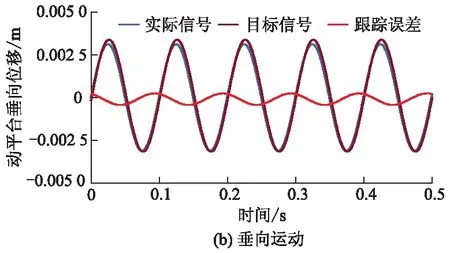
图8 10.0 Hz正弦信号跟踪试验
3.3.2正弦扫频运动测试
通过正弦扫频试验能够准确地辨识喷杆悬架系统的频响函数,确定共振频率,以做耐振处理.对于半主动喷杆悬架系统,通过扫频测试可以清晰地判别在哪个频率范围悬架系统是主动的,在哪个频率范围主动悬架逐渐被被动悬架代替.用正弦扫频信号作为系统扰动信号输入,通过Stewart六自由度运动平台输出频率0.05~0.70 Hz、幅值1°的正弦线性等形扫频信号,该扫频激励范围包含了市场上摆式喷杆悬架的共振频率.
扫频测试的目标信号、动平台实际角位置及跟踪误差如图9所示,均方根误差0.020 0°,最大误差0.098 0°,随着频率增大,跟踪误差逐渐增大.被测28 m喷杆悬架的频响特性如图10所示.
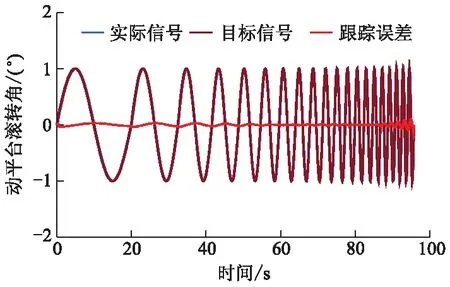
图9 正弦扫频试验
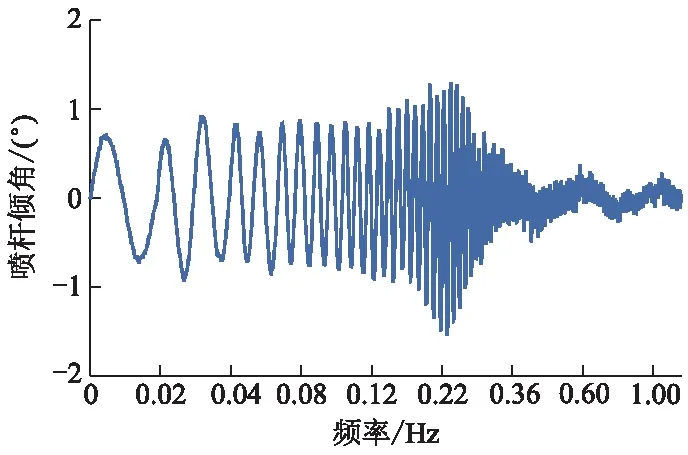
图10 被动悬架频响特性
当滚转运动的频率在0.02 Hz到被动悬架的共振频率0.24 Hz之间,被动悬架几乎不起减振作用,在共振频率0.24 Hz处,被动悬架在共振频率附近将激励放大,激励频率高于共振频率时,被动悬架开始发挥衰减振动作用,随着扰动频率增加,喷杆角度稳定在-0.27°~0.28°.
3.3.3田间实测运动复现
随着喷杆式喷雾机不断大型化,作业速度也不断增加,喷杆的设计由传统静态分析设计到动态设计转变,利用六自由度运动平台可在试验室内进行各种田间工况模拟和多次重复试验,用于研究喷杆悬架系统的动态特性、喷臂结构的可靠性等.
本实验室开发六自由度运动平台主要用途之一是大型喷杆田间工况模拟,因此需要采集喷杆安装位置附近的喷雾机车架运动信号,在不同地域(黑龙江、江苏、新疆建设兵团等)采集了多种机型作业时的典型运动谱数据,经过信号处理,编入数据库中.如图11所示,喷杆式喷雾机(Mazzotti MAF5240)在田间行驶过程中,使用双GPS辅助的姿态测量系统(SBG Ellipse-D-G4A2B1,SBGSystem)进行喷雾机车身运动姿态信号采集,该测量系统内置加速度计测量范围±8g,陀螺仪角速度测量范围±450 (°)·s-1,零偏稳定性±0.2(°)·s-1,姿态最大测量误差(艾伦方差)滚转0.1°、俯仰0.1°、偏航角0.2°,采样频率200.0 Hz.姿态测量系统的数据通过基于ZigBee协议的DTK 2617C无线模块发送至远程接收模块,可以实现1.5 km范围内的数据传输.

图11 喷雾机田间运动数据采集
通常直接采集到的喷雾机运动信号往往叠加有噪声信号,使得振动曲线呈现许多毛刺,为了削弱噪声信号的影响,首先对实测运动信号进行平滑处理,采用五点三次平滑法对数据进行平滑[31],然后使用有限冲激响应数字滤波器进行低通滤波处理,截止频率10.0 Hz,最后将处理后的数据输入实时控制计算机,控制动平台实时跟踪该目标信号,其中滚转运动、垂向运动轨迹及跟踪误差如图12和图13所示.在有负载的情况下,动平台滚转角均方根误差为0.297 0°,最大误差为0.779 0°;垂向位移均方根误差为15.7 mm,最大误差为61.3 mm.从试验数据可知,动平台在10.0 Hz以内低频波形复现精度较高,可以用于喷杆自平衡悬架的动态模拟.
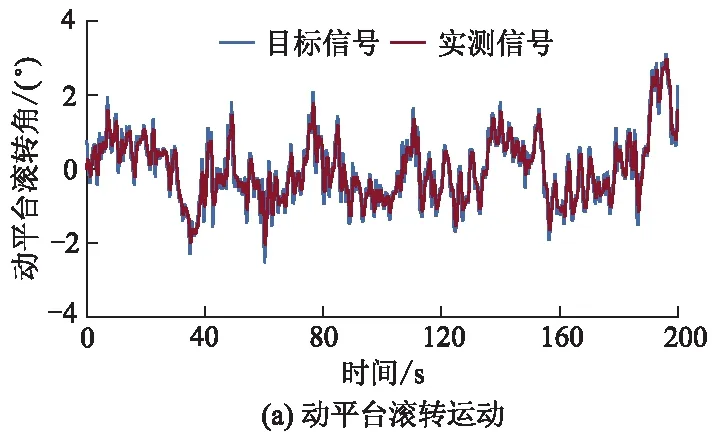
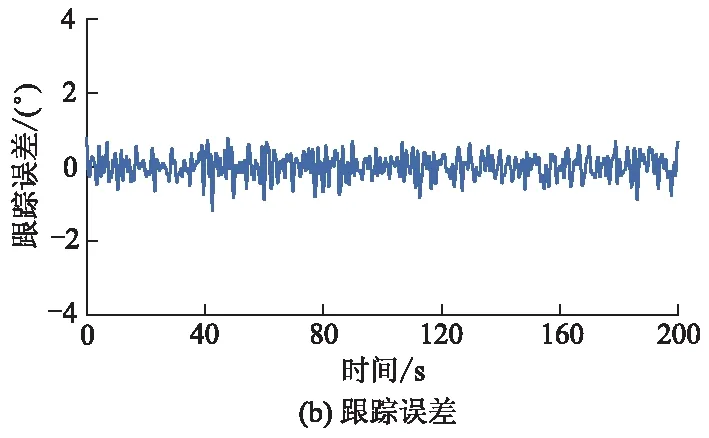
图12 动平台滚转运动
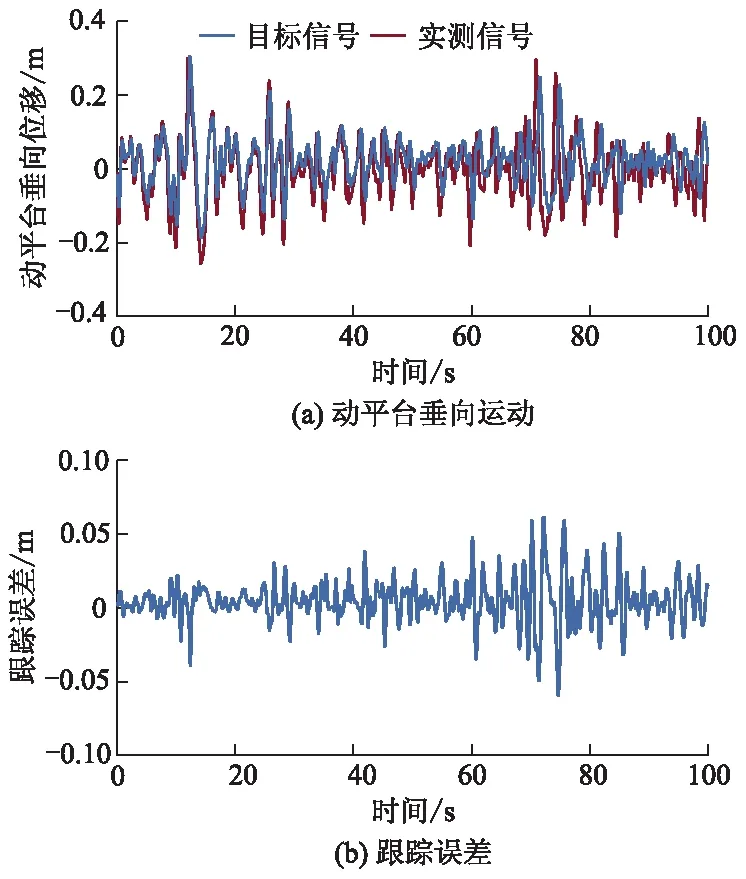
图13 动平台垂向往复运动
4 结 论
随着喷杆逐渐大型化,振动问题的日益突出,依据前期国内外农业机械振动测试、室内运动模拟研究现状,对大型喷杆适用的运动六自由度模拟平台进行了设计,首先确定了试验台的性能指标(负载质量、运动幅值、频率),通过MATLAB和ADAMS建模与仿真,分析了Stewart并联机构运动学和动力学特性,计算出了动平台的可达空间,以及极限工况下驱动腿的最大推力,进行了伺服电动机和滚转丝杠的选型,校验平台设计参数的合理性,并设计了6个伺服电动缸的分布式控制系统及上位机软件,搭建了六自由度喷杆动态模拟平台.
为了测试控制器的复现精度,选用正弦信号、正弦扫频信号、田间实测信号3种信号进行了试验.从试验数据可知,动平台的10.0 Hz以内低频全波形复现精度较高,可以用于喷杆自平衡悬架的频响特性测试.同时,采用了基于双GPS辅助惯性姿态测量系统,采集喷雾机在农田作业时运动姿态数据,通过平滑预处理和低通滤波,在六自由度运动模拟器上进行了10.0 Hz以下田间运动时域全波形复现,动平台滚转角均方根误差为0.297 0°,最大误差0.779 0°;垂向位移均方根误差15.7 mm,最大误差61.3 m.未来还将继续深化平台功率谱控制策略的研究,实现平台10.0 Hz以上振动功率谱的复现,用于喷杆喷雾机关键部件疲劳耐久性试验.
猜你喜欢
农业开发与装备(2022年7期)2023-01-05
农业装备与车辆工程(2022年5期)2022-10-31
中国农机化学报(2022年8期)2022-08-12
新高考·高三数学(2022年3期)2022-04-28
农业机械学报(2022年2期)2022-03-14
中小企业管理与科技(2019年3期)2019-03-07
中学生数理化·高一版(2018年6期)2018-07-09
江苏农机化(2018年3期)2018-06-23
农机使用与维修(2018年3期)2018-03-23
农业知识(2018年45期)2018-01-17
