差分组合目标定位的舰炮对海射击检靶方法
2020-03-23 13:20徐义桂陈维义
兵器装备工程学报 2020年2期
徐义桂,陈维义
(海军工程大学 兵器工程学院,武汉 430033)
水面舰艇舰炮武器系统执行对海射击训练任务时,目前常采用舰载雷达、光电跟踪仪等设备完成海上检靶任务。但是舰载雷达对海上目标探测时,存在一定的不足:易受到海杂波和多路径的影响,探测性能低;有时其无法将目标回波从复杂背景回波中分辨出来;对炸点海水柱回波无自动识别功能且显示效果不清晰,等等。而舰载光电跟踪仪探测时又易受船体的摇摆影响,光电平台不易稳定。这样就造成了炸点海水柱测不到、测不准、检靶效率低以及检靶过程繁琐等问题,不利于舰炮射击效果的评定和编队射击训练工作的组织。
当前,随着无人机目标定位技术的不断发展,可对海上目标进行视频实时侦察定位,具备实时性强、效率高、分辨率高、造价低及使用便利等优点,可用于解决上述问题。通过查阅相关文献发现,周前飞[1]、徐诚[2]、蔡明兵[3]等提出了基于机载光电平台的多目标定位算法,可以同时完成对多个目标实时定位,具备目标定位效率高、实时性强及工程应用性强等优异特性,但是,由于镜头畸变、传感器测量误差等因素的影响,导致目标定位精度不佳;张辉[4]、樊邦奎[5]等提出了无人机空间三点距离交会定位的方法,由于该方法在一定程度上减少了无人机姿态角、光轴稳定转台角度等测量误差对目标定位的不良影响,目标定位精度较高,但是该方法只能对单点目标进行定位。通过分析无人机海上检靶的过程可知,在执行检靶任务时涉及到对海上靶标(理论上的静止靶标)和炸点海水柱同时定位过程,且测量精度要求尽可能高。因此,本研究在上述前人研究的两种目标定位技术的基础上进行融合改进,提出了差分组合的目标定位方法。
1 差分组合定位原理和模型解算过程
1.1 差分组合定位原理

(1)

(2)
1.2 模型解算过程
可选用具备垂直起降的固定翼无人机(如,KC3400型无人机),如图1所示,其携带相应的载荷后(电视摄像机、激光测距仪等),经舰艇编队释放并前出至指定区域进行工作。无人机差分组合定位的舰炮射击检靶模型解算过程如图2所示。

图1 KC3400型垂直起降固定翼无人机
图2 模型解算过程框图
2 炸点海水柱的偏差量测量
在舰炮对海射击训练过程中,通过无人机完成检靶任务的关键是要完成无人机对海面静止靶标和炸点海水柱的高精度定位,然后才能计算出炸点与靶标之间的偏差量。无人机多目标定位算法,是通过一次测量达到同时多点定位的目的,具体过程为:首先建立坐标转换空间坐标系及确定坐标之间的转换关系,然后根据某时刻目标定位过程中的海上靶标、炸点海水柱及它们在像片中的几何位置关系,并融合无人机姿态角、摄像机转角、摄像机焦距等参数,推导出所拍摄图像中任一点在摄像机坐标系中的坐标,接着通过齐次坐标转换解算得到海上靶标和炸点海水柱在大地空间直角坐标系下的位置坐标,即完成多目标定位过程[1-3]。空间三点交会目标定位算法,是通过对海上靶标实施跟踪过程中,在三个不共线的位置点分别进行采样,然后对采样后的数据进行空间交会解算并通过坐标转换得到海上靶标在大地空间直角坐标系下位置坐标的定位算法,特别适合针对单一目标进行重点侦察定位[4-5]。利用差分组合定位原理对炸点海水柱的位置坐标进行修正,以达到减少系统随机误差对定位结果影响的目的。最终在得到海上靶标位置坐标和炸点海水柱的修正位置坐标后,计算其两者间的距离(又称之为炸点海水柱偏差量)。
2.1 多目标定位算法
2.1.1坐标系定义
多目标定位算法涉及六个空间坐标系,如图3所示,分别定义为[2,6-7]:① 大地坐标系C,在大地坐标系中任一点的坐标以纬度B、经度L和大地高H表示,如图3(a)所示;② 大地空间直角坐标系E:与大地坐标系定义完全相同,但在大地空间直角坐标系中任意一点的坐标是以直角坐标的形式表示,如图3(a)所示;③ 载体地理坐标系G,即为“东北天坐标系 ”,如图3(a)所示;④ 载体机体坐标系B,当载体机体坐标系相对载体地理坐标系的三轴姿态角为0°时,其三轴指向与载体地理坐标系三轴指向重合,设φ(偏航角)、ω(横滚角)、θ(俯仰角)分别为绕Zb、Yb、Xb轴旋转的转角,如图3(b)所示;⑤ 摄像机坐标系S,当摄像机在初始位置时,Zs轴指向载机机头,Ys轴指向机体正下方,Xs轴指向载机右翼的方向,三轴构成右手坐标系,其中光轴旋转角为方位角α和高低角β,如图3(c)所示;⑥ 图像坐标系W,如图3(d)所示。

图3 各坐标系定义
2.1.2坐标转换过程
在图3中,建立了多目标定位模型中所用的空间坐标系,设目标像点在W系下的坐标为(xw,yw),目标分别在S系、B系、G系和E系下坐标为(xs,ys,zs)、(xb,yb,zb)、(xg,yg,zg)和(xe,ye,ze),目标在C系下的坐标为(B,L,H)。
1)根据某时刻目标的像点在摄像机屏幕坐标(即图像坐标系下的坐标),由三角形相似原理可得目标P在摄像机坐标系下的xs、ys坐标,zs可由本文2.1.3节求解得到:
(3)
其中f为摄像机的焦距。
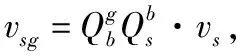
2)根据齐次坐标转换法,可用四阶矩阵来表示坐标的旋转、平移、放大或缩小等[8]。借助此种方法,将目标在摄像机坐标系下的坐标转换为在大地空间直角坐标系下的齐次坐标,计算公式为:
(4)


α、β为摄像机光轴的方位角、俯仰角,φ、ω、θ为无人机偏航角、横滚角、俯仰角,B0、L0、H0为无人机某时刻所处的经度、纬度、高度,N为某处WGS-84椭球卯酉圈曲率半径,e为WGS-84椭球的第一偏心率。
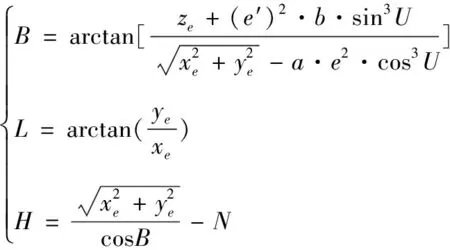
3)由大地测量学基础知识可知[7],大地坐标系与大地空间直角坐标系之间的坐标转换公式为:
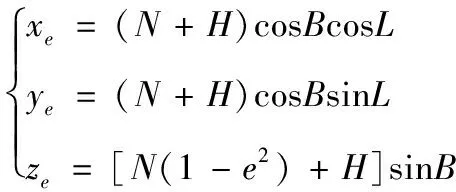
(5)
(6)

2.1.3多目标定位模型
图4所示为无人机定位过程中海上靶标、炸点海水柱和它们在像片中像点的几何关系模型,M为海上静止靶标,P为炸点海水柱,m、p为它们在像片中的像点,T1为海平面,T2为图像平面。在无人机对海上靶标定位过程中,利用光电跟踪器产生标志框套住靶标,并控制光轴稳定转台转动将目标始终锁定在摄像机视场中心。待舰炮射击后,摄像机视场内炸点海水柱出现瞬间,锁定该帧图像并输出无人机遥测参数。

图4 目标、炸点和像点的成像几何关系模型
1)海上靶标的位置定位

(7)
2)炸点海水柱的位置定位
在某一时刻无人机搭载的摄像机获得的帧图像中,炸点海水柱像点p分别在图像坐标系和摄像机坐标系下的坐标为(xwp,ywp)、(xwp,ywp,f),摄像机的焦距为f,且设OsP与OsM的夹角为ε,则:
(8)
(9)
根据图5的几何关系可知:
(10)
则炸点海水柱在摄像机坐标系中的Zs轴坐标值为:

(11)
又将式(8)代入式(11)便可得:
(12)
再将式(12)代入式(3)可得xsp和ysp:
(13)
结合上述各式可得,炸点海水柱在摄像机坐标系下的齐次坐标值为tsP=[xsP,ysP,zsP,1]T,最后由式(4)的齐次坐标转换可得炸点海水柱在大地空间直角坐标系中的齐次坐标teP=[xeP,yeP,zeP,1]T。
2.2 空间三点交会定位算法
图5所示为当无人机侦察到海上靶标后,光电跟踪器通过标志框套住目标,无人机沿其飞行轨迹在海上靶标上空附近区域飞行,并在其的航迹三点处分别进行一次激光测距,设激光测距值为R1,R2,R3;同时输出无人机的位置坐标,分别为(x1,y1,z1)、(x2,y2,z2)、(x3,y3,z3),则:
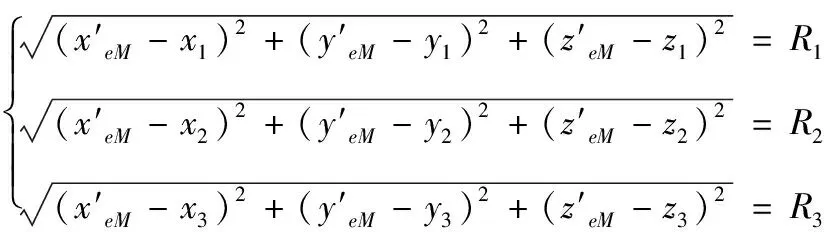
(14)

图5 无人空间三点交会定位示意图

(15)
3 炸点海水柱偏差量测量误差分析
3.1 蒙特卡洛仿真实验
误差分析是衡量炸点海水柱偏差量测量模型优劣的重要环节。在借助无人机平台进行炸点海水柱偏差量测量过程中,影响炸点海水柱偏差量测量结果的因素很多,主要包括:GPS测量误差、导航系统的姿态角测量误差、载荷传感器测量误差及像片中像点坐标测量误差等。由概率论知识可知,这些测量误差近似的服从正态分布,因此可假设参数测量误差Δx服从的分布为[9]:
Δx~N(0,σ)
故可利用模特卡罗法建立误差传递模型:
ΔY=G(x1+Δx1,…,xn+Δxn)-G(x1,…,xn)
(16)
其中:xi为各参数的名义值;Δxi为各参数的测量误差,G为相关模型计算过程。
为了分析本文炸点海水柱偏差量测量模型的误差特性,可采用蒙特卡洛模拟统计实验的方法分析模型的误差特性。其中,可根据各传感器设备技术手册上提供的最大标定误差作为模拟过程中各测量误差正态分布的均方差值[10-11],如表1所示。于是通过蒙特卡洛方法可统计出炸点海水柱偏差量误差的均方差,具体步骤如图6所示。

表1 测量参数随机误差分布的均方差值

图6 蒙特卡洛法仿真步骤框图
3.2 仿真结果与分析
借助Matlab软件按照图6中的蒙特卡洛法仿真步骤编写程序仿真得到2 000组炸点偏差量数据,并进行统计学分析,得到如图8所示的仿真结果,其中,图7(a)为多目标定位算法仿真结果,图7(b)为差分组合定位算法仿真结果。对比图7(a)与图7(b)可以看出,两种算法解算得到的2 000组炸点偏差量测量结果误差均近似服从μ=0的正态分布;不同的是经过差分组合定位原理修正后,炸点偏差量误差“体型”明显变“瘦”,表明经过修正后的炸点偏差量误差的均方差值有一定的减小。根据统计数值可知,经过差分组合修正后的炸点偏差测量精度提高4 m左右,因此,差分组合定位修正有效果。

图7 两种算法解算的炸点偏差量误差仿真结果
4 结论
基于差分组合定位原理推导出了舰炮对海射击检靶模型,可有效解决炸点海水柱测不到、测不准、检靶效率低以及检靶过程繁琐等问题。通过差分组合修正后的炸点偏差量误差的均方差值有一定减小,检靶精度提高约4 m左右。
本研究未充分考虑无人机自身性能、靶场测试环境等局限对该检靶方法的影响,舰载雷达设备开机时容易导致无人机失控“栽入”海中等。未来无人机技术不断成熟,该方法对于解决舰炮检靶难的问题具有积极作用。
猜你喜欢
今日农业(2022年4期)2022-11-16
火力与指挥控制(2022年3期)2022-04-27
导航定位学报(2022年2期)2022-04-11
红领巾·萌芽(2022年3期)2022-03-13
军民两用技术与产品(2021年10期)2021-03-16
语数外学习·高中版中旬(2021年11期)2021-02-14
师道·教研(2019年7期)2019-08-13
考试周刊(2018年15期)2018-01-21
中学生数理化·七年级数学人教版(2017年4期)2017-07-08
物联网技术(2016年12期)2017-01-21