基于MCR-WPT的电动汽车动态无线充电系统的负载电压控制器
2020-03-22 09:38张伟杰范兴明
桂林电子科技大学学报 2020年6期
张伟杰, 范兴明, 张 鑫
(桂林电子科技大学 机电工程学院,广西 桂林 541004)
动态无线充电(dynamic wireless charge, 简称DWC)技术是一种以电磁场为媒介,通过铺设于地面下的电源轨道与接收机构的磁耦合作用对移动中的电动汽车实现电能传输的输电技术[1-4]。电动汽车动态无线充电系统的线圈考虑到道路维护,需要埋在地下,要求无线充电能够远距离传输。磁耦合谐振式无线充电技术(MCR-WPT)因其高效的中程传输能力而适合于这种应用。由于电动汽车无线充电系统需要适应各类车型,输出功率在较大范围内要求可调,且输出电压和电流需要保持稳定,所以设计负载控制器用以满足系统要求。在接收端采用DC-DC变换电路可使发射效率最大化,它不仅由发射线圈和接收线圈的参数决定,而且还由负载条件决定。因此,以负载反馈控制DC-DC变换电路可以增强系统的鲁棒性和提高效率。
鉴于此,采用等效电路理论对基于磁耦合谐振式的电动汽车动态无线充电系统结构进行分析,设计了一种采用DC-DC变换电路模型的带反馈控制的负载电压控制器。仿真结果表明,该负载电压控制器是有效的,可提高系统传输效率和充电功率,使系统拥有最佳的鲁棒稳定性。
1 系统结构与理论分析
1.1 系统结构
动态无线充电系统的基本结构包括发射端和接收端,如图1所示。通过发射端转换电能为高频交流电进行发射,接收端接收转换电能给电动汽车供电。发射端部分和接收端部分均采用串联结构进行补偿,保证发射端工作频率和接收端工作频率一致,实现高效耦合谐振,保证系统传输效率。
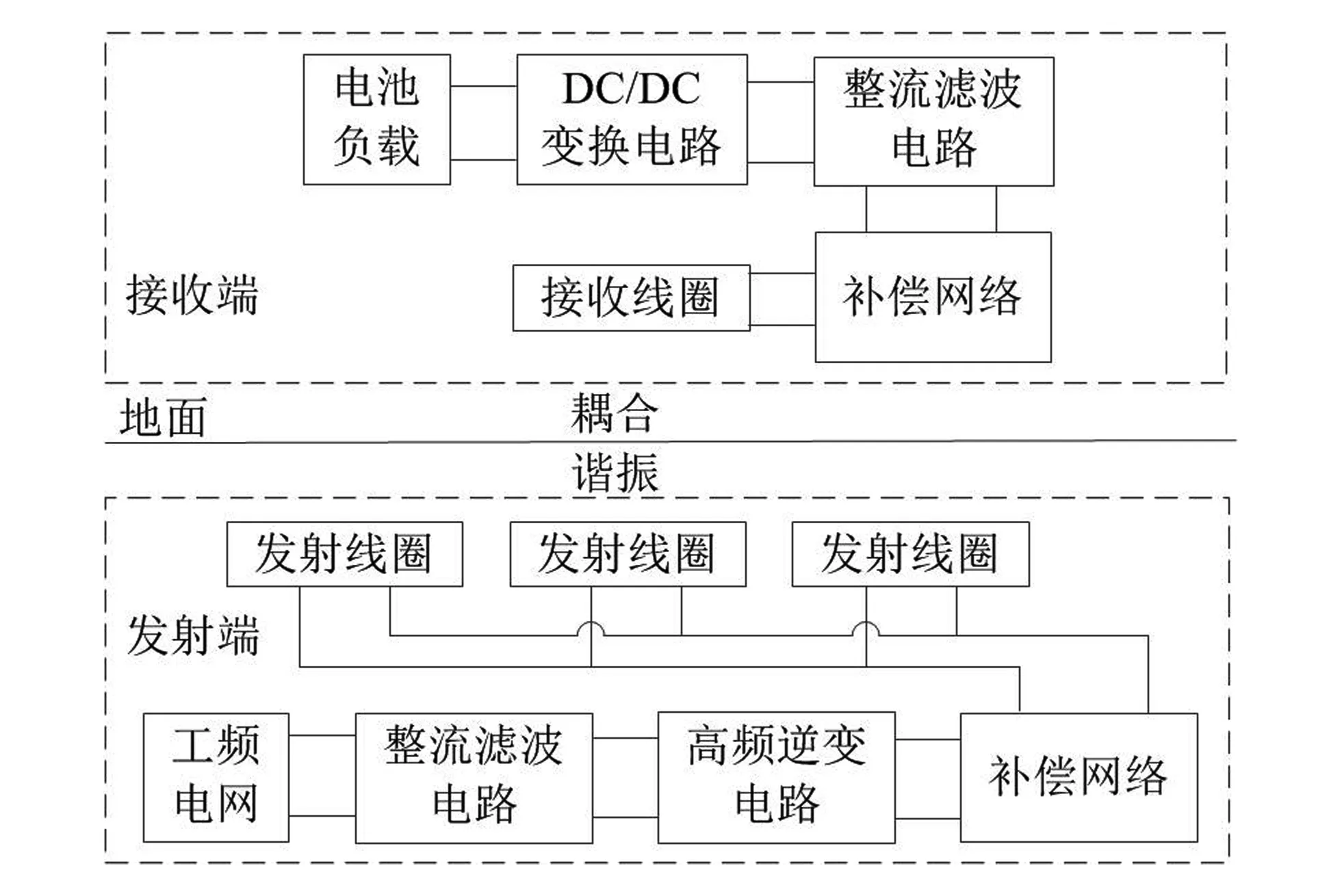
图1 动态无线充电系统基本结构图
1.2 理论分析
基于S-S拓扑结构的无线充电系统,利用电路分析法,分析接收端到发射端的反映阻抗,在此基础上推导输出功率和传输效率。图2为发射无线充电系统的等效电路图。其中,US为高频逆变电压源,IP1、IP2、IR分别为发射端两回路与接收端回路的电流,LP1、LP2、LR分别为发射端两回路与接收端回路的耦合电感,CP1、CP2、CR分别为发射端两回路与接收端回路的串联谐振补偿电容,MP1,R、MP2,R、MP1,P2分
别为发射端两回路与接端线圈与接收端线圈、两发射端线圈之间的互感,RP1、RP2、RR分别为发射端两回路与接收端回路的等效内阻,RL为系统负载。

图2 无线充电系统的等效电路
由基尔霍夫电压定律可得等效电路方程:
(1)
其中:ZP1、ZP2、ZR分别为两发射端线圈回路与接收端线圈回路阻抗,
(2)
ω为角频率,ω=2πf,f为谐振频率。
由于发射端并联,且各个结构相同,LP=LP1=LP2,CP=CP1=CP2,RP=RP1=RP2。因此,ZP=ZP1=ZP2。
由式(1)、(2)可解得各回路电流:
(3)
因为电动汽车无线充电系统线圈工作在谐振状态,所以
(4)
假设接收端线圈刚好移动到位于两发射端线圈的中间位置,则
MP1,R=MP2,R=MP1,P2。
(5)
由式(3)解得系统输出总功率:
(6)
因此,系统传输效率为
2jω3MP1,RMP2,RMP1,P2]·(2ZR(ZP-jωMP1,P2)+
(7)
2 控制器设计
通过在动态无线充电系统接收端负载前增加输出DC-DC变换电路,以实现接收端负载平稳充电控制。电动汽车动态无线充电过程中,系统耦合系数处于波动变化状态,导致系统接收功率波动大,接收端易造成电压激增,需要稳定接收端电压大小。因此,选择降压型变换电路作为DC-DC变换电路对输出功率进行调节。
图3为DC-DC变换电路的等效电路。Cf为直流链电容器的电容,起降压和储能作用,在一定程度上能保持输出电压的恒定;Lf为电抗器线圈的电感,二极管Df为续流二极管;iL为流过电抗器线圈的电流;iC为流过直流链电容器的电流;vo为流入电池的负载电压。

图3 DC-DC变换电路等效电路
DC-DC变换电路的对象模型可用状态空间平均法来描述[8]。负载电压控制器采用滑模变结构控制算法,选择负载两端电压误差为控制状态变量。在连续导电模式下,电压误差x1和电压误差变化率x2可表示为
(8)
其中:Vref、vi、βvo分别为参考电压、变换前输入电压瞬时值、检测到的负载输出电压瞬时值;Cf、Lf、rL分别为DC-DC变换电路的电容、电感、负载电阻;u=1或u=0为功率开关管Sw的开关状态。
将式(8)对时间求导,得到状态空间模型:
(9)
负载电压控制器根据控制参数x1和x2确定开关函数u。滑动面函数为
S=αx1+x2,
(10)
其中,α为滑动系数,且为待确定的控制参数。令S=0,可得梯度为α的滑动线,以滑动面为分界线,确定2个区域,对应为2个开关状态,开关状态引导滑动轨迹向滑动线移动,当轨迹到达滑动线并跟踪滑动线移动时,认为系统为稳定状态,即x1=0,且x2=0。
为了使系统能够获得快速的动态响应,需保证滑动系数α足够小,以使存在区域足够大,故将α设为
(11)
控制器需要对参数x1、x2作连续估计,故将式(8)、(11)代入式(10),得
S=Kp1(Vref-βvo)+Kp2iC,
(12)

由于开关的不完美性,所以容易产生抖振现象,而导致不必要的开关损耗、磁性损耗以及电磁干扰等问题。因此,通过引入具有边界条件S=k、S=-k的泄环以消除抖振,定义控制律为

(13)
其中,k为任意小的值。通过引入含不触发开关动作的区域-k≤S≤k,可有效地控制最大开关频率,缓解抖振现象。此外通过改变k的大小,可以控制工作频率。由此,得到的基于滑模变结构算法的负载电压控制器将会自动稳定。
3 仿真分析
3.1 系统仿真模型
为验证所设计的负载电压控制器的有效性,根据前述负载电压控制器,在Simulink中搭建系统仿真电路,验证基于滑模变结构控制算法的充电效果。仿真参数设置如表1所示。

表1 系统仿真参数设置
图4为搭建的动态无线充电系统仿真电路。设置2组发射端和接收端的耦合线圈,这2组线圈的电感和耦合系数相同,通过在发射端设置延时通断开关交替转换接通位置,实现动态无线充电的模拟仿真。
3.2 负载电压控制的有效性
设定总仿真时间为0.1 s,通过在发射端不断切换线圈实现动态充电的仿真,切换周期为0.02 s,仿真得到的负载电压控制器的负载电流仿真波形如图5所示。从图5可看出,从开始供电到系统稳定运行仅用了0.017 6 s,通过在发射端不断切换线圈使系统参数变化时,负载充电电流误差在±0.001 A内,且恢复平衡时间保持在0.000 1 s内。因此,该负载电压控制器充电电流误差小,充电波动小,可实现负载均衡充电。

图4 负载电压控制动态无线充电系统仿真电路

图5 负载电压控制负载电流仿真波形
3.3 不同耦合系数条件下的适应性
由于运动过程中产生的线圈偏移将导致发射端和接收端的线圈耦合性能下降,需进一步研究所设计的负载电压控制器对接收线圈不同耦合条件的适应性。根据线圈偏移的相对位置不同,选择耦合系数k为0.1~0.5进行仿真,得到如图6所示的不同耦合系数条件下的系统负载电流曲线。

图6 不同耦合系数条件下系统负载电流曲线
从图6可看出,当耦合系数变化时,负载电压控制器依然具有充电电流误差小、充电波动小的特点;动态充电过程中,在不同耦合条件下均能保持充电平稳;在线圈耦合更高时,起始供电至稳定运行状态的幅值更小,且恢复平衡状态时间更短。因此,该负载电压控制器具有较好的抗偏移性,能够在不同偏移情况下快速调整至最佳状态。
3.4 变负载条件下的适应性
为了进一步研究该负载电压控制器对负载的适应性,通过改变负载大小进行动态仿真。根据负载功率大小不同,选择电阻RL为6、8、10、12 Ω作为系统负载进行仿真,得到如图7所示的系统负载电流曲线。

图7 不同负载条件下系统负载电流曲线
从图7可看出,当负载改变时,负载电压控制器依然具有充电电流误差小、充电波动小的特点,不同负载在动态充电过程中均能保持充电平稳。其中,在系统负载相对较小情况下,起始供电至稳定运行状态时间更短,且幅值更小。因此,该负载电压控制器具有较好的负载适应能力。
4 结束语
采用等效电路理论对基于磁耦合谐振式的电动汽车动态无线充电系统结构进行分析,设计了一种采用DC-DC变换电路模型的带反馈控制的负载电压控制器。仿真结果表明,该负载电压控制器是有效的,
且具有充电电流误差小、充电波动小等特点,在不同耦合系数或负载变化时,均体现了较好的抗偏移能力和负载适应能力,具有较好的鲁棒稳定性。
猜你喜欢
电工技术学报(2022年19期)2022-10-14
大电机技术(2022年4期)2022-08-30
汽车实用技术(2022年5期)2022-04-02
石家庄铁路职业技术学院学报(2021年1期)2021-06-09
科学技术创新(2021年7期)2021-03-23
声学技术(2020年4期)2020-09-15
装备制造技术(2020年12期)2020-05-22
模具制造(2019年7期)2019-09-25
汽车文摘(2017年3期)2017-12-08
汽车维护与修理(2015年6期)2015-02-28