基于卡尔曼滤波的无人机目标跟踪系统
2020-03-18 09:42:40段淇超袁天夫王宇倩皇甫萍萍
智能计算机与应用 2020年10期
段淇超, 袁天夫, 王宇倩, 皇甫萍萍
(上海工程技术大学 电子电气工程学院, 上海 201620)
0 引 言
机器视觉是人工智能领域快速发展的一个重要分支,通过机器代替人眼来进行检测和判断,而目标跟踪算法则是当前机器视觉的一个重要研究方向。
目前市面上大多数跟踪算法相继被应用于无人机领域,例如:基于均值偏移(Meanshift)是一种概率密度分布的跟踪方法,这种算法适用于背景和色彩模块差异较大的情况,但在室内环境下的目标跟踪效果欠佳。根据仿射变换, 排除伪特征点, 然后基于图像像素守恒原理, 进行两幅图像间变形评估, 建立图像约束方程, 达到准确跟踪目标的基于特征点检测的光流算法[1];通过寻找一个滤波模板,让下一帧的图像与寻找到的滤波模板做卷积操作,响应最大的区域就是预测目标的相关滤波(Correlation Filter)跟踪算法[2]。该算法的缺陷是如果目标快速移动,形状发生较大变化会对预测结果造成影响;而传统的跟踪算法只能对目标的运动状态与轨迹做一个大致估计,当目标被遮挡时极易导致目标信息丢失,从而跟踪失效。
本文将经典的卡尔曼滤波(Kalmen Filter,KF)算法应用于无人机目标跟踪系统中。卡尔曼滤波是一种利用递归实现目标方位估计的滤波器,它能够从一系列含有噪声的测量中,估计预测目标系统的下一时刻的位置信息,对目标的轨迹进行预测,并且使用确信度较高的跟踪结果进行预测结果的修正, 即只要获取上一时刻状态的估计值以及当前状态的观测值就可以计算出当前状态的估计值,因此不需要记录观测或者估计的历史信息,是控制领域常用的一种算法。
1 基于卡尔曼滤波的跟踪算法
1.1 卡尔曼滤波器
卡尔曼滤波器有很多用处,包括控制、导航等。卡尔曼滤波器是一种对动态系统的状态序列进行线性最小方差估计的算法,通过状态方程和观测方程来描述一个动态系统,基于系统以前的状态序列对下一个状态作最优估计,预测时具有无偏、稳定和最优的特点,且具有计算量小、可实时计算的特点,可以较为准确地预测目标的位置和速度。
本文将卡尔曼滤波器运用在无人机目标跟踪上,假设使用卡尔曼滤波器的3个条件:
(1)系统是线性的;
(2)影响测量的噪声属于白噪声;
(3)噪声服从高斯分布。
在线性高斯系统中,运动方程、观测方程是线性的,且两个噪声项服从零均值的高斯分布。卡尔曼滤波就是根据上一时刻的估计值递推求解的过程。
1.2 无人机目标跟踪流程
无人机目标跟踪流程如图1所示。待测目标通过镜头处理后的影像传输给摄像机,摄像机捕获待检测目标的图像,将其转换为电信号输入到图像采集卡初步的处理,经过卡尔曼滤波器输入到无人机飞控系统中,最后飞控对其进行分析和处理,并将结果送入到控制机构,对设备进行控制,实现智能化的控制和处理。
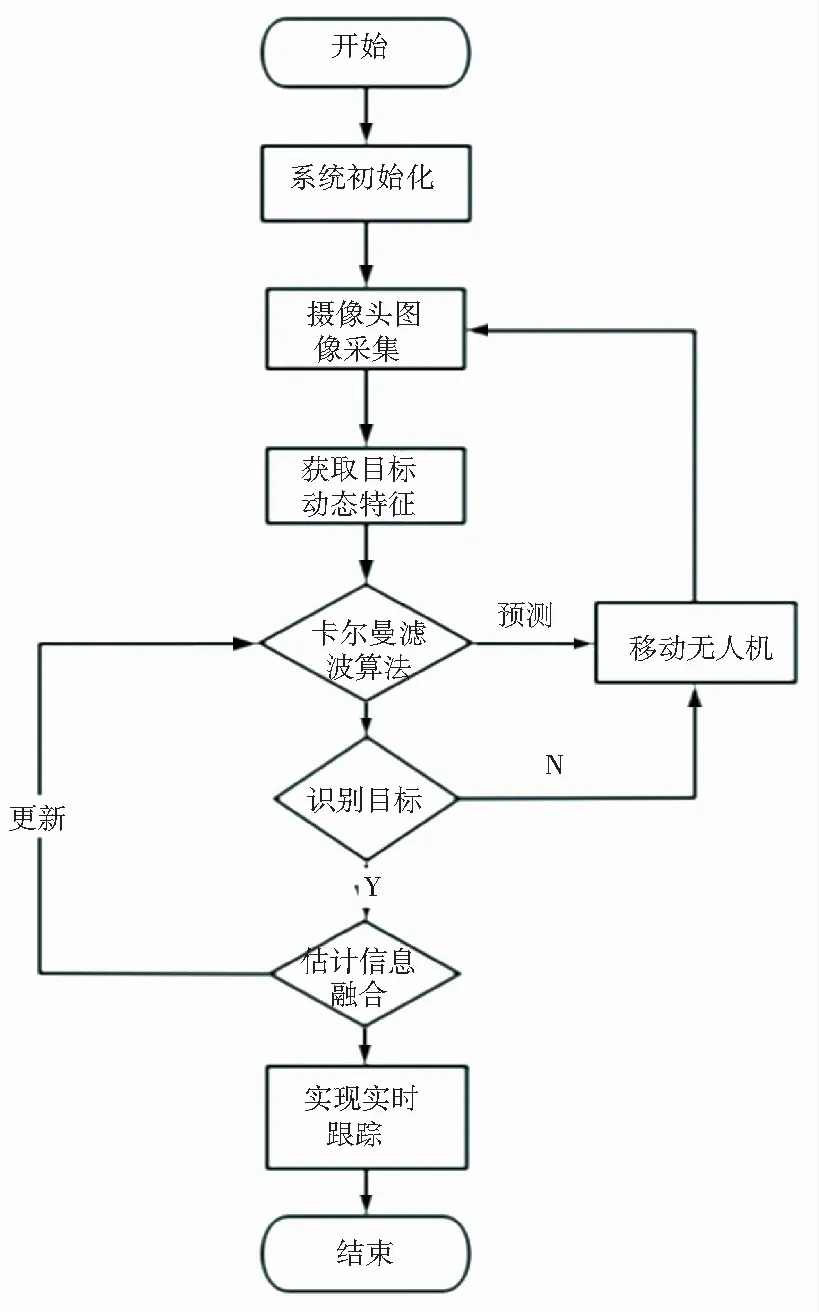
图1 目标跟踪流程图
1.3 目标状态预估算法
本文的目标状态估计算法是基于卡尔曼滤波的框架下,通过预测和更新两个主要步骤完成对数据的处理,最终实现对目标位置信息的预测估计。具体步骤如下:
(1)通过摄像头捕捉到运动目标的初始位置信息;
(2)通过卡尔曼滤波对返回的位置信息进行有关目标跟踪的处理。卡尔曼滤波的基础数学方程为状态方程与观测方程[3],式(1)和式(2):
xk=Ak,k-1xk-1+ξk-1,
(1)
Zk=HkZk+ηk.
(2)
其中:xk和xk-1为k与k-1时刻的状态向量;zk为k时刻的观测向量;Ak,k-1为从k-1时刻到k时刻的状态转移矩阵;Hk为观测矩阵;ξk为系统噪声;ηk为观测噪声;Qk、Rk分别表示ξk和ηk的方差。
关于状态修正与状态预测的过程方程涉及5个公式。
卡尔曼滤波增益,式(3):
(3)
修正状态向量,式(4):
(4)
修正误差协方差矩阵,式(5):
Pk=Pk,k-1(1-KkHk).
(5)
状态向量预测方程,式(6):
(6)
误差协方差预测方程,式(7):
(7)
其中,式(6)和式(7)是状态预测过程,式子(3)、式(4)和式(5)则是对状态修正过程。
假定卡尔曼滤波的状态向量为式(8):
xk=[x(k)y(k)Vx(k)Vy(k)]T.
(8)
其中,x(k)y(k)是返回的视频中得到的目标中心点位置坐标,Vx(k)Vy(k)是通过计算得到的目标中心点在x轴y轴方向上的速度分量。)根据卡尔曼滤波公式,分别对Ak,k-1、Zk、Hk、Q、R进行设定。由于无人机上摄像头返回的视频流中相邻帧之间的目标运动过程可近似看成匀速运动,因此为了便于计算,本文设定相邻两帧间的时间间隔Δt=1,则状态向量的初始值可以表示为式(9):
(9)
在基于此算法实现目标位置信息融合时,会出现两种情况:当目标物体被检测到时,卡尔曼滤波使用最新检测到的目标位置来更新状态,由此产生一个过滤的位置;当目标物体不出现在摄像头内时,卡尔曼滤波则完全依赖之前的状态信息预测当前帧中目标的位置。
(3)最终通过卡尔曼滤波返回的预测目标位置信息传入至飞控系统中,进行无人机的姿态调整以及飞行路线规划。
2 实验结果与分析
本文通过搭建无人机平台来评估卡尔曼滤波算法的可行性,采用MATLAB软件进行仿真实验,运动目标设置为移动小车,采集无人机所获取的图像进行结果分析。
仿真结果表明,卡尔曼滤波算法在追踪移动的物体时,无人机能够有效的跟进并捕捉目标位置,算法运算量少,拥有较高的跟踪实时性,如图2所示。但随着时间的累积,卡尔曼滤波器的自身原因会出现导航精度下降,算法性能仍需要改善。

图2 无人机目标跟踪
3 结束语
本文提出的一种基于卡尔曼滤波的无人机跟踪系统,该能够快速的处理目标信息数据,提高了目标的跟踪精度,无人机采用卡尔曼滤波算法预测时无偏差、运算速度快、不易丢失目标、具有一定的实时性,适用于复杂环境的目标追踪,拥有良好的发展前景。
猜你喜欢
军事文摘(2023年18期)2023-11-03 09:45:42
新高考·高一数学(2022年3期)2022-04-28 07:02:46
中学生数理化(高中版.高考数学)(2021年1期)2021-03-19 08:28:36
北京航空航天大学学报(2017年9期)2017-12-18 07:12:25
测绘科学与工程(2017年1期)2017-05-04 03:40:44
太空探索(2016年7期)2016-07-10 12:10:15
高中生学习·高三版(2016年9期)2016-05-14 09:12:05
电源技术(2016年9期)2016-02-27 09:05:39
新高考·高二数学(2015年11期)2015-12-23 18:17:44
电源技术(2015年1期)2015-08-22 11:16:28