输电线路带电遥控自动化检修装置研究与应用
2020-03-13 08:11张明李庆兴
科技创新与应用 2020年8期
关键词:输电线路
张明 李庆兴

摘 要:文章介绍一种输电线路带电遥控自动化检修装置,可解决输电线路常见小型带电作业项目,只需人员地面遥控操作,能大大提高带电作业工作效率,提高电网可靠性。
关键词:输电线路;带电遥控;自动化检修装置
中图分类号:TM75 文献标志码:A 文章编号:2095-2945(2020)08-0157-03
Abstract: This paper introduces a kind of automatic inspection and repair device for live control of transmission lines, which can solve the common small live work items of transmission lines. Only personnel ground remote control operation is needed, which can greatly improve the work efficiency of live work and improve the reliability of power grid.
Keywords: transmission line; live remote control; automatic maintenance device
目前线路带电作业,主要依靠具有带电作业资质的熟练人员完成,而随着电网规模的不断扩大,输电线路带电作业检修压力逐渐增大。加上对电网可靠性的要求越来越高,提高输电线路带电作业工作效率成为输电线路的迫切需求。
1 输电线路自动化检修装置理论和实践依据
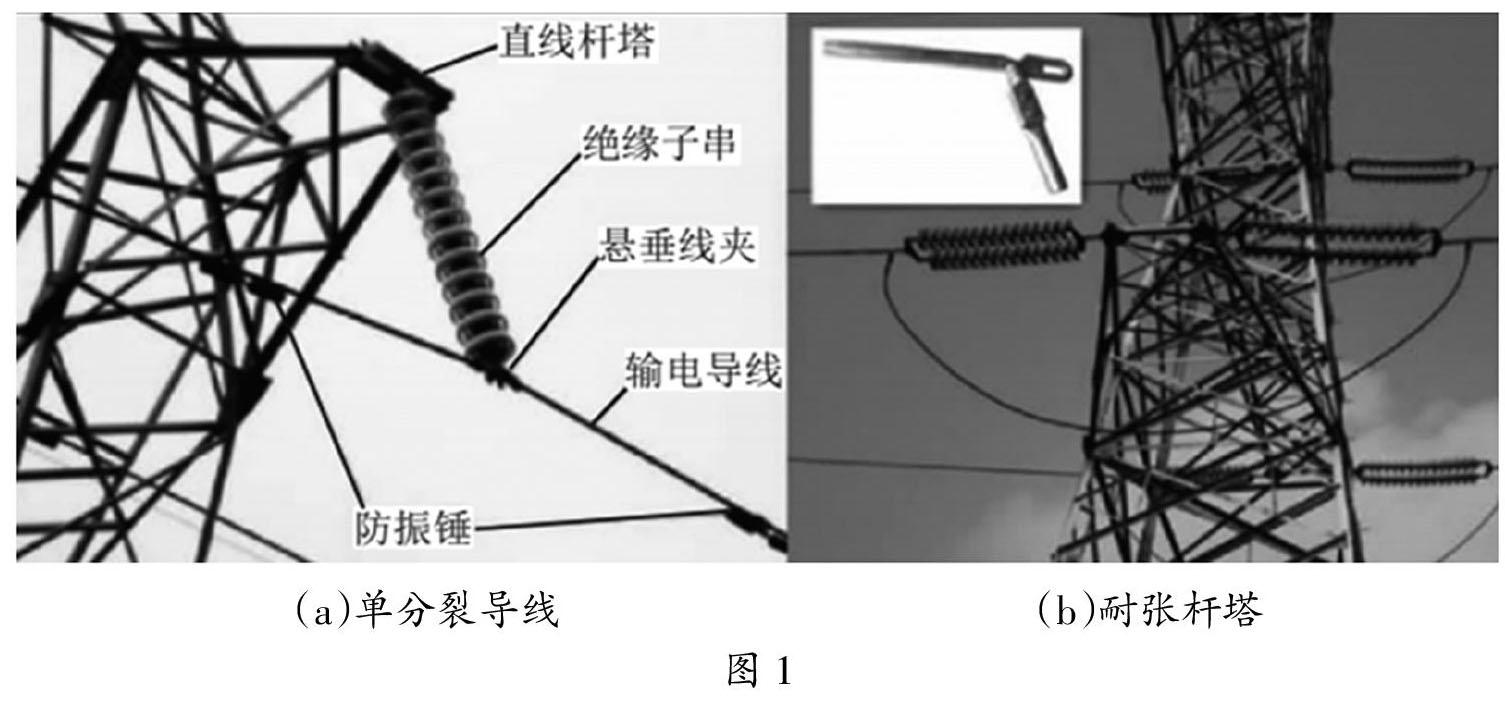
当前高压输电线路有多种类型,机器人在高压输电线路中的运用主要分为两种:(1)面对地线作业机器人;(2)面对导线作业机器人。后者的主要任务包括了紧固螺栓、修补导线以及复位防震锤等。本文设定的作业对象为 220kV耐张杆塔上压缩型耐张线夹螺栓以及单分裂导线上单联悬垂绝缘子串,同时展开双作业任务:禁锢耐张线夹螺栓,人工辅助更换单片绝缘子。借助球头挂环,在杆塔横担之上悬挂悬垂绝缘子串的上端,其中间主要由许多绝缘子进行串联,而其下端则利用W销联接于碗头掛板,如图1(a)所示。压缩型耐张线夹由管体、引流板、引流线夹以及连接引流板引流线夹的外六角螺栓组成,耐张线夹两端分别与导线、跳线连接,如图1(b)所示。
带电校紧引流板螺栓和拆除母线引流线装置共用一个机器人移动平台,利用无人机载体,把带电工作装置或传递装置运至工作点,利用地面人员遥控器给工作装置作业指令,并按步骤完成作业要求。
2 输电线路自动化检修装置结构总体方案
2.1 系统框图(图2)
2.2 主要工作过程
现场使用时,将线上执行装置启动并安放到线上。打开地面控制系统PC主机上的主操作软件,线上执行装置上的高清图传系统可将图像数据传输到PC主机上。现场工作人员可以根据PC主机上的视频观察和了解高压线上设备的工作环境和状况。现场人员操作地面控制台上的按键或摇杆等,如操作线上执行装置移动,地面控制器会采集地面控制台上的操作数据,将对应的操作转换成指令并通过无线传输模块传输到线上执行装置。线上执行装置通过主控制器读取无线传输模块采集到的数据,并转换解析成相应执行指令,并下发到各执行器,如移动平台接收到指令后,按照指令移动相应的位置。线上执行装置其他执行机构如机械臂、螺栓固定末端、螺栓拧紧末端、拆线引流末端,与地面控制系统采用同样的方式进行遥控操作。
2.3 移动平台
机器人的关键载体便是移动平台,其主要的组成机构包含了夹爪、机体、行走轮机构以及机械臂等。在实际工作过程中,机体之上将固定两条机械臂,其上端经由夹爪支架对等电位轮、行走轮机构以及夹爪等进行固接。与此同时,行走轮机构内部的行走轮将由电机带动进行转动,并且驱使机器人沿当前的导线进行移动。除此之外,夹爪支架内的电机丝杆在转动过程中,将对夹爪进行驱动,使其将导线夹紧,从而确保机器人在移动的时候不会与导线脱离。
2.4 双机械手臂
末端装置将会随着此类手臂全部关节运动,被携带至指定的作业平面。对固定末端进行携带的手臂主要组成部分包括了纵移关节、旋转关节以及伸缩关节等,而手臂将经由旋转关节固定座被固接到相应机体之上,随后纵移关节移动滑台将会携带螺栓将引流线固定末端拆除,或者固定末端。旋转关节在竖直平面中实现转动的主要因素为蜗轮蜗杆机构的日常传动,而移动关节以及伸缩关节纵向、竖直方向移动的实现,主要得益于丝杆螺母机构的日常传动。
携带螺栓拧紧末端的机械手臂与携带固定末端的机械臂而言,增加了一个可沿着机体横向移动的横移关节,因此共由横移关节、旋转关节、伸缩关节、纵移关节四部分结构组装而成。横移导轨固定在机体上,横移关节同样有丝杆螺母机构传动横向移动。
2.5 母线螺栓固定末端和螺栓拧紧末端
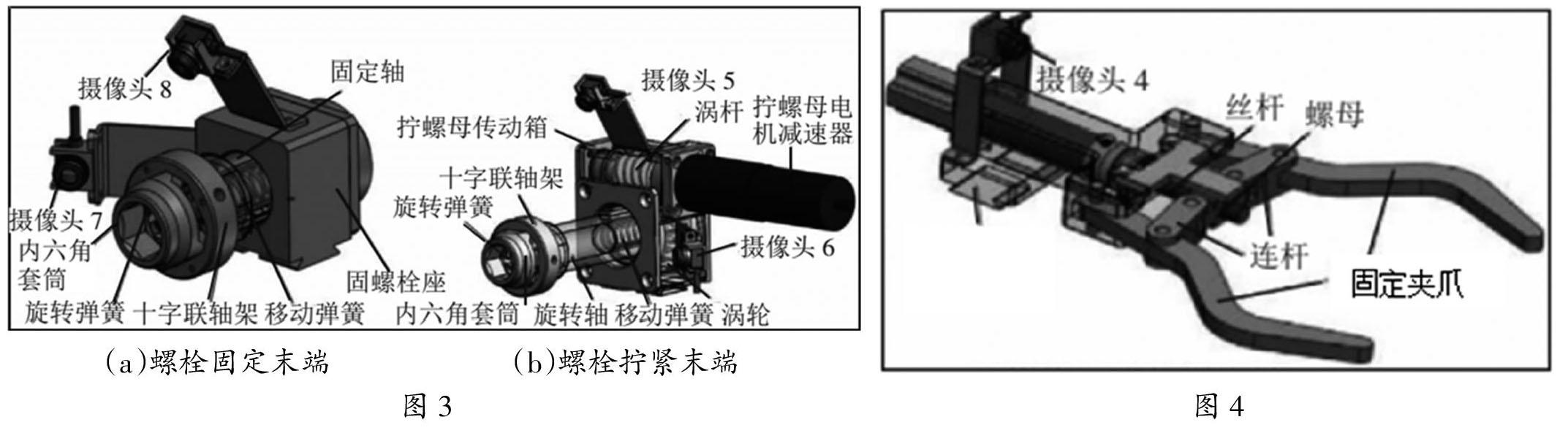
为了防止在螺栓紧固过程中,因螺栓头跟随螺母一起转动而导致螺母无法拧紧。因此带电作业机器人采取仿人的结构形式,以双作业臂进行作业,即一个机械臂携带末端固定住螺栓,另一个机械臂携带末端拧螺母,并且作业末端同样考虑采用内六角套筒的形式与外六角螺栓配合,因此机器人的作业臂需要调节作业末端装置相对于外六角螺栓的位置,使得末端装置的内六角套筒与螺母同轴。与此同时,为了完成套筒与螺母的准确对接,作业末端需要具备旋转自由度,使得内六角套筒相对于螺母进行位置上的微调。末端装置安装2个相互垂直的微型摄像头,可全方位观察套筒相对于螺母的位置。实体模型如图3所示:
2.6 拆除引流线末端
引流线固定夹爪如图4所示,通过电动机带动丝杆旋转,使螺母沿着丝杆移动,进而带动固定夹爪的开合。夹爪与移动平台相连。引流线固定夹可以將绝缘绳引流线固定器与引流线固定在一起。
母线螺栓紧固工作过程:首先,将作业机器人吊装上线,机器人的两行走轮挂在导线上后,通过驱动旋转电机,使机器人沿着导线行驶,并将两机械手旋转至工作位置;根据摄像头观察到图像,确定机器人拧螺栓的初始位置,安装螺栓固定末端的机械手旋转关节2向前旋转,通过摄像头反映的图像对其旋转及伸缩关节进行微调,使螺栓固定装置的内六角套筒与螺栓头同轴心,随后纵向关节1向前移动靠近螺栓头直至将螺栓头压住,限制其转动;装备螺栓拧紧末端的机械手旋转关节向前旋转,观察摄像头图像,对其进行横移旋转及伸缩微调,使螺栓拧紧末端的内六角套筒与螺母同心,随之移动纵向关节1靠近螺母,直至将螺母完全套住,拧螺母装置电机旋转,进行螺母拧紧。内六角套筒根据实际需求设计成适应不同螺栓或螺母大小,同时使用套筒结构可以避免螺栓或螺母卸载下来后掉到地上。
2.6.1 拆卸
完成母线螺栓紧固工作后,机械手末端更换为拆除引流线末端装置。首先,将作业机器人吊装上线,机器人的两行走轮挂在导线上后,通过驱动旋转电机,使机器人沿着导线行驶至工作位置,装配引流线螺栓末端机械手纵向关节2向前移动,同时,旋转关节1逆时针旋转,根据摄像头观察到图像,确定机器人拧螺栓的初始位置,安装螺栓固定末端的机械手旋转关节2向前旋转,通过摄像头反映的图像对其旋转及伸缩关节进行微调,使螺栓固定内六角套筒与螺栓头、螺栓、以及旋转套筒同轴心,随后拆除引流线末端装置进行夹紧,直至将螺母完全套住,拧螺母装置电机旋转,进行螺母拧紧或拆卸。另一机械手末端更换为引流线固定夹爪,通过引流线机械臂(带夹爪)上下和前后移动微调,将绝缘绳引流线固定器推到和引流线紧密接触的位置,通过电动机带动丝杆旋转,使螺母沿着丝杆移动,进而带动固定夹爪夹紧,使得固定器固定夹紧在母线引流线上,为防止引流线与母线脱开瞬间产生电弧,松开夹爪同时往下拉绝缘绳,脱开母线引流线。
2.6.2 安装
在地面将新的母线引流线系在安全绝缘绳上,拉动安全绳,将母线引流线拉动引流线机械臂等高的位置,控制机械臂夹紧母线引流线并对准螺栓孔,操作螺栓安装机械臂完成螺栓的安装。
3 结束语
输电线路带电作业机器人是目前电力行业较为专注的重点研究领域之一,该装置可解决输电线路高压引流线的拆卸和耐张线夹的紧固带电作业项目,从而保证变电站配件检修和更换,操作简单,只需人员地面遥控操作,能大大提高带电作业工作效率,提高操作人员的安全性,降低作业成本。该项目研制成功,可提高效率60%,降低作业成本50%,社会效益更高。
参考文献:
[1]苏启奖,黄炎,钟力,等.输电线路螺栓紧固带电作业机器人及自提升上线装置的研究与应用[J].广东电力,2019(09):133-135.
[2]黄智明.输电线路带电作业巡检清障机器人的设计[J].机电信息,2017(27):107-108.
[3]李若云.输电线路螺栓紧固机器人控制方法的研究[D].长沙理工大学,2017.
猜你喜欢
科学与财富(2016年26期)2016-12-01
企业技术开发·中旬刊(2016年10期)2016-11-12
企业技术开发·中旬刊(2016年10期)2016-11-12
科学与财富(2016年28期)2016-10-14
科学与财富(2016年28期)2016-10-14
科学与财富(2016年28期)2016-10-14
科学与财富(2016年28期)2016-10-14
科技视界(2015年25期)2015-09-01